据研究数据表明,水域中的废弃物约有 70% 会沉入海底或分解成微塑料和纳米塑料,总量高达 1000 万吨。在 MAELSTROM 开展的一个研究项目中,他们以人工智能系统为基础,开发了一种自主式机器人,它可以在 20 米深水域处选择性地识别和收集废弃物。该系统通过基于 PC 的控制技术自动控制,已于 2022 年 9 月在威尼斯运河通过了试运行。
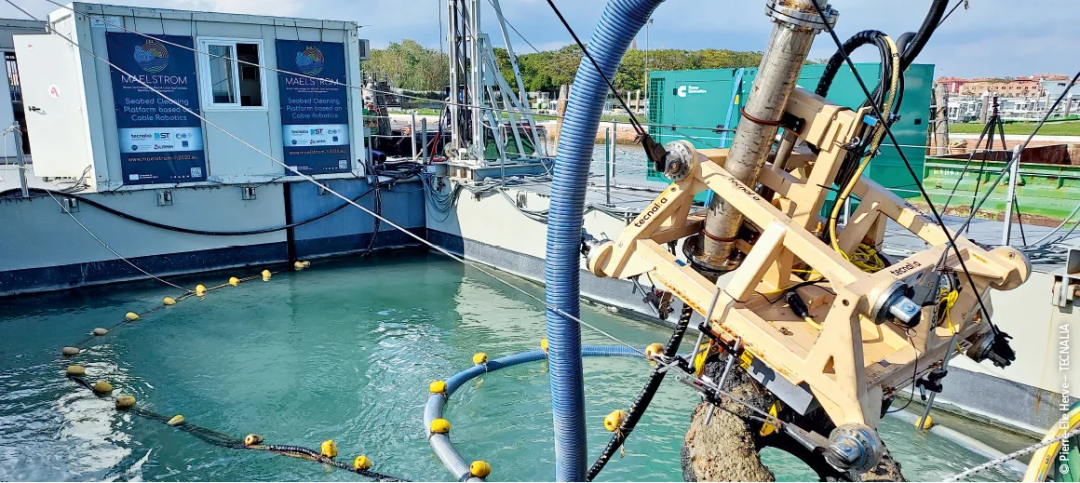
如果想要防止垃圾危害脆弱的水下生态系统,或者防止微塑料和纳米塑料通过食物链进入我们的身体,就必须阻止水域受到进一步污染,清理水下垃圾。这正是欧盟“地平线 2020” — MAELSTROM 项目的目标:开发和整合各项技术,以识别、清除、分拣各类海洋垃圾并将其转化为原材料。为此,一个由西班牙 TECNALIA 研究院、法国 CNRS-LIRMM 机器人研究所和意大利 Servizi Tecnici 公司组成的国际研究小组开发了“海底垃圾清理机器人”。其核心是一个配备抓手和抽吸装置的水下机器人,借助 8 个绞盘在六个自由度内灵活移动。
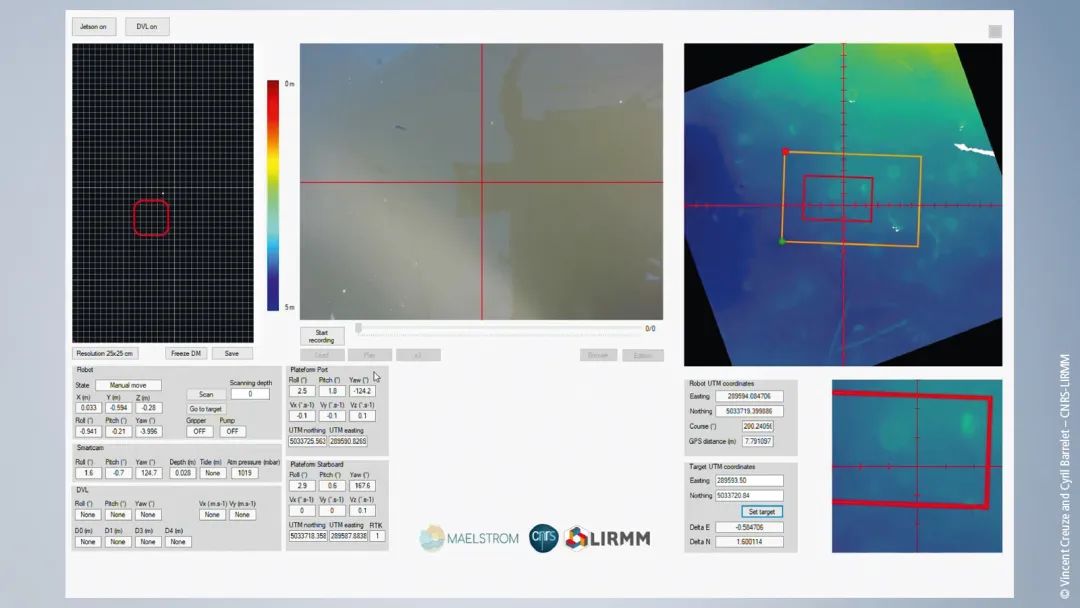
手动控制显示屏:操作人员可以看到水深测量地形图。该图定位在机器人平台的内部区域(橙色矩形)的中心。红色矩形表示安全工作区域,机器人平台与缆索之间不会发生碰撞。下方区域表示钢缆的拉伸应力。
机器人通过传感器和摄像头探测海底垃圾,自动将自己定位在垃圾上方,并能举起重达 130 公斤的物体(包括自行车、轮胎、箱子和鱼网)。较小的物体或漂浮在水面上的塑料垃圾则通过抽吸装置收集。“由于我们是在海面上作业,只有在需要时才启动抓手或抽吸装置,因此我们可以实现高选择性,最大限度地减少对海底生态系统的影响。”来自 TECNALIA 的 MAELSTROM 项目经理 Mariola Rodríguez 解释道。
定位绞盘由倍福的 AX5118 伺服驱动器和 AM8071 伺服电机同步控制。“为了确保稳健、精确和快速定位,我们选择了无刷同步伺服电机。”TECNALIA 缆索机器人团队的电子工程师 Jose Gorrotxategi 指出。另一个优势是驱动器采用了单电缆技术(OCT),减少了绞盘的布线工作和空间需求。绞盘钢索可确保机器人支架在水下精确定位,并在水流湍急的情况下保持高稳定性。电机轴上的编码器可检测电缆卷筒的角度位置和转数,从而间接确定盘绕电缆的长度。
电磁制动器和力传感器对缆索张力的监测确保了应用所需的安全性。如果测量结果超出允许范围,缆索机器人会立即停止工作,并显示错误信息。
水上水下传感器集群
水下缆索机器人支架内装有多个传感器和摄像头用于控制和监测,支持手动、自动和远程操作。“只要水下能见度不是太低,就能手动控制摄像头和照明灯。”TECNALIA 缆索机器人团队的机械工程与控制工程师 Pierre-Elie Herve 补充道。操作人员可以点击摄像头画面中感兴趣的海底位置,机器人就会自动靠近这些位置。机器人支架上的压力传感器可检测潜水深度,惯性测量单元(IMU)可控制机器人在水中的位置。多普勒速度仪(DVL)通过四个声纳传感器记录移动平台与海底的距离及其相对速度。
其它传感器(包括一个压力传感器)放置在水上浮桥上,用于在深度控制过程中补偿大气压力的变化。两个 GPS 实时动态定位装置实时确定驳船的位置和垂直方向。来自这些不同系统的所有数据都被整合到机器人的控制和位置调节系统中。例如,根据这些数值,机器人平台可以精确接近并保持之前在深度图(水深测量地形图)上选定的位置,从而提高机器人的工作效率。“这种能力已经在威尼斯泻湖非常浑浊的水域中得到了充分彰显。”Mariola Rodríguez 指出。
缆索机器人的控制和通信
水下电缆机器人共有 12 根轴(8 个绞盘和浮桥桅杆上的 4 个垂直活动滑块),由 C6650 控制柜式工业 PC 中安装的 TwinCAT 3 控制。工业 PC 安装在控制室的主控制柜中。除了索力监测之外,系统(控制室、无线操控和绞盘)上的多个急停按钮也可确保机器人安全运行。相应的安全逻辑由 TwinSAFE 逻辑端子模块 EL6910 执行。带抱闸的伺服驱动器通过 AX5805 TwinSAFE 驱动器选项卡集成到安全应用中。
另外四个配电模块分散安装在内含 I/O 接口模块和索力测量电子装置的缆索绞盘上。控制柜与配电模块之间的连接通过 Ethercat P 完成。Jose Gorrotxategi 评论道:“EtherCAT 技术的这一扩展使得直流供电和 EtherCAT 实时通信能够通过一根电缆实现。”

AX5118 伺服驱动器控制缆索机器人的八个绞盘驱动装置以及底座托架的四根轴。
机器人平台控制
操作人员通过操纵杆以及水下移动平台的估计位置和移动平台上的摄像头控制缆索机器人。除了通过水下摄像头进行视觉控制之外,操作人员还可以通过 HMI 选择不同的控制模式,并根据传感器数值监测所有功能。
用于水下感知的摄像机系统主要实现视觉伺服控制:操作人员一旦看到海洋垃圾(由于水比较浑浊,距摄像头的距离相对较短),就可以点击摄像头画面中的垃圾,缆索机器人的移动平台就会自动靠近垃圾。
HMI 中还集成了通过 DVL 系统和摄像头创建的深度图。操作人员可以选择画面中的任意一个位置,然后移动平台就会向该位置移动。除了手动操作之外,支架还能自动识别、锁定和收集垃圾。“人工智能是实现这一切的基础,它能够识别海洋垃圾,并选择最合适的清除装置。”Pierre-Elie Herve 解释道。
针对海底垃圾清理机器人平台开发的软件可以实时计算机器人的地理位置,这要归功于实时全球定位系统(实时动态测量或 RTK)和负责测量和报告位置或方向并同时监测和控制绞盘的惯性测量装置。此外,海底地形图上会显示机器人和垃圾位置。机器人既可以自主移动,通过软件确定“水中的运动轨迹”,也可以通过操纵杆手动控制。机器人移动时,摄像头和声学传感器会扫描海底,测量深度(水深)并探测垃圾。这些数据都有地理坐标,并在地形图上实时显示。
关于德国倍福
倍福(Beckhoff)是一家专注于自动化新技术的德资企业,创立于 1980 年,总部位于德国威尔市。作为全球自动化技术的驱动者,倍福定义了自动化领域的许多标准,是国际标准的制定者和推动者。公司所生产的工业 PC、现场总线模块、驱动产品和 TwinCAT 自动化软件构成了一套完整的、相互兼容的控制系统,可为各个工控领域提供开放式自动化系统和完整的解决方案。经过 40 年的发展和努力,倍福已在世界各地设立 30 多家分支机构,加上全球的合作伙伴,业务遍及 70 多个国家和地区。
倍福于 1997 年进入中国市场,中国区总部落户于上海市北高新产业园区,现有员工 300 人,办事处遍及国内 30 座大中城市。创新产品和解决方案广泛应用于风力发电、半导体、光伏太阳能、电子制造、金属加工、包装机械、印刷机械、塑料加工、轮胎加工、木材加工、玻璃机械、物流输送以及楼宇自动化等众多领域。
公司倾力推广的 EtherCAT 实时工业以太网于 2014 年成为中国国家推荐性标准,并已入编工信部的《国家智能制造标准体系建设指南》。作为一家技术驱动型公司,倍福一直注重在技术上寻求突破创新,在业内享有“创新引擎”的美誉。倍福基于 PC 的控制技术具有良好的开放性,它支持所有主流的工业通信协议,将 IT 技术、互联网和自动化技术完美融合在一起,为实现工业 4.0 和智能制造奠定了坚实的技术基础。
更多新闻请浏览: https://www.beckhoff.com.cn