本 | 期 | 看 | 点
工业机器人选型注意事项
一、三菱电机MELFA系列工业机器人本体选型
1.选型前判断机器人能否实现
选型前需要考虑机器人能否实现,如要求精度为1μm等超高精度、节拍时间为0.1秒等超高速度、工件重量为15kg等重的物体、有防爆要求或用在腐蚀环境等要求时,由于处于机器人的规格外,或MELFA产品阵容没有对应的产品,这样的情况,即使再怎么探讨,MELFA机器人仍然不能使用。此时,可以考虑其它产品相关替代的方案。如果没有问题的话,进行后续机种的选择。
2.机器人机种选择时确认事项
机器人机种的选择时需要综合考虑作业内容、使用环境、动作姿势、搬运重量以及动作范围。
当要求作业姿势垂直上下、作业范围小、节拍要求高、成本低时,可考虑四轴机器人。当要求作业姿势变化大、作业范围大、复杂作业时考虑六轴机器人。
当机器人负载较重、体积较大时,还需要探讨机器人规格中的力矩和允许惯量这一项。否则机器人可能无法正常动作。
其中,四轴机器人需要允许惯量的验算,六轴机器人需要允许力矩、允许惯量的验算。如下所示,机器人样本中给出了力矩、惯量的计算方法。
(1)三菱电机四轴机器人惯性计算方法
在机器人前端的机械接口上设定了允许惯性。安装了超过允许的负载时,有可能发生动作时的振动及过负载报警。因此,选定机器人时,需要讨论装在前端的抓手及负载是否合适。以下对负载惯性的计算方法进行说明。
计算绕J4轴旋转的所有惯性。
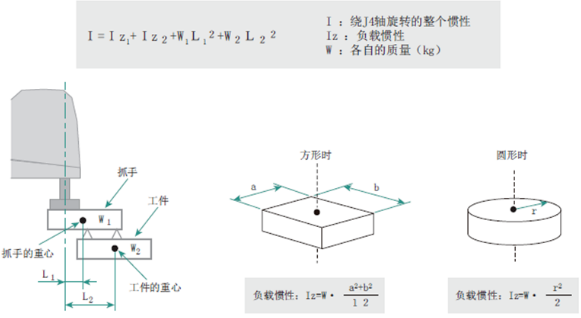
图1 三菱电机四轴机器人惯性计算方法
(2)三菱电机六轴机器人惯性计算方法
垂直过关节型机器人的情况下,需要对于腕轴(J4轴~J6轴)的负载惯量、腕轴(J4轴~J6轴)的负载惯性进行探讨。考虑到使用的抓手、工件的姿势,应计算J4轴~J6轴各轴的负载惯量和负载惯性,并进行探讨。如下所示为探讨的示例之一。
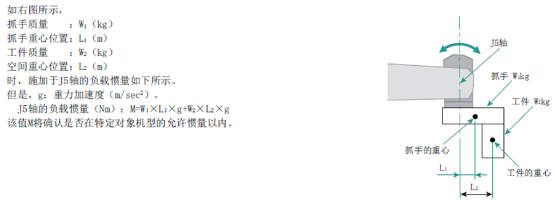
图2 负载惯量的计算示例
(法兰朝下状态时J5轴的情况)
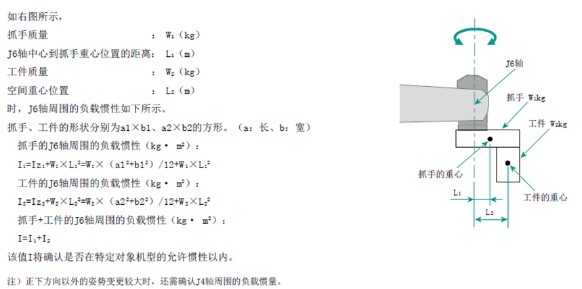
图3 负载惯性的计算示例(J6轴的情况)
二、三菱电机MELFA系列工业机器人产品阵容
1.四轴机器人产品构成
- 四轴机器人分为高性能的FRH系列和高性价比的CRH系列机器人
- 采用最新型的伺服控制,实现同级别机器人中最高水平的高速动作
- 本体规格根据需要可选配对应IP65的油雾规格和对应ISO 3级的洁净规格
- 标配以太网口、CC-LINK IE Filed Basic网络以及追踪功能、附加轴功能

※另外,还有食品、药品行业专用机型可供选择。
图4 四轴机器人产品构成
2.六轴机器人产品构成
- 六轴机器人分为高性能的FR系列和高性价比的CR系列机器人
- 采用最新型伺服控制、最优化的手臂构造设计,实现高速度、高精度动作
- 本体规格根据需要可选配对应IP67的油雾规格和对应ISO 3级的洁净规格
- 标配以太网口、CC-LINK IE Filed Basic网络以及追踪功能、附加轴功能
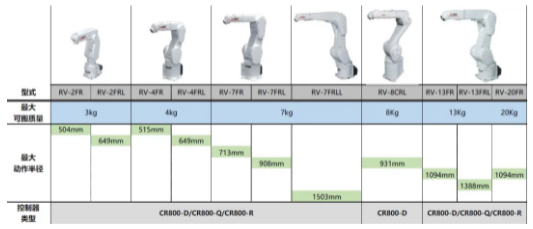
※另外,还有食品、药品行业专用机型可供选择。
图5 垂直多关节型系列组成
3.机器人控制器产品构成
(1)CR800-R、CR800-Q控制器
- 支持将生产现场的各种控制器和HMI、工程环境、及网络进行无缝整合的“iQ Platform”平台。
- 多CPU的构成,飞速提升了与FA设备的亲和性,也可简单快速实施精细控制、信息管理。
(2)CR800-D控制器
- 仅由机器人本体和机器人控制器构成的独立性控制器。可以以机器人控制器作为控制核心来构建单元。
- 标配各种接口,结合客户的应用,构建最合适的系统。

图6 CR800-R、CR800-Q 和CR800-D机器人控制器
三、三菱电机MELFA系列工业机器人选配件
(1)三菱电机机器人本体选件
①四轴机器人本体选件
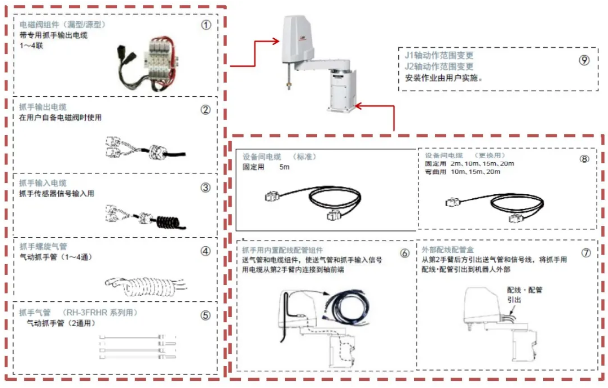
图7 三菱电机四轴机器人本体选件
②六轴机器人本体选件

图8 三菱电机六轴机器人本体选件
(2)三菱电机机器人控制器选件
① CR800-R、CR800-Q控制器
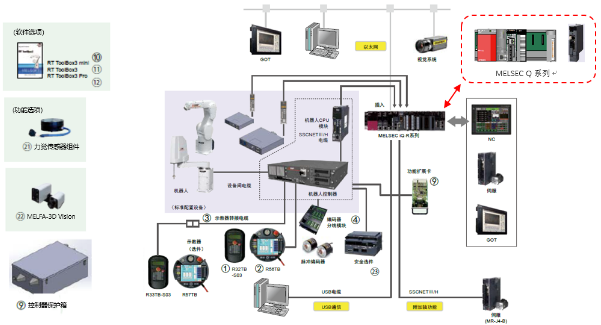
图9 三菱电机机器人控制器选件(R/Q)
②CR800-D控制器
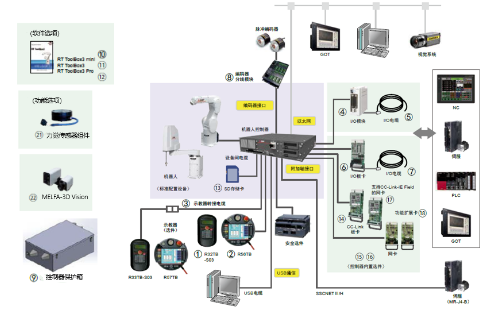
图10 三菱电机机器人控制器选件(D)
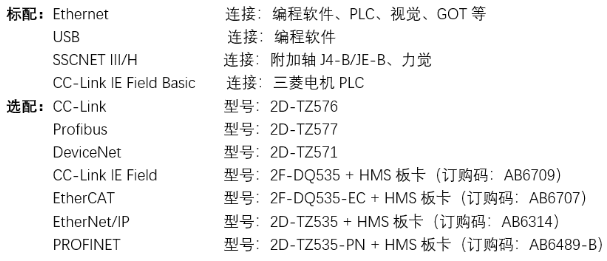
③各种网络选件注意事项
D系列机械手可以使用以下网络板卡选件。R/Q系列机械手则考虑使用iQ-Platform平台的对应网络模块(以下板卡不能使用)。
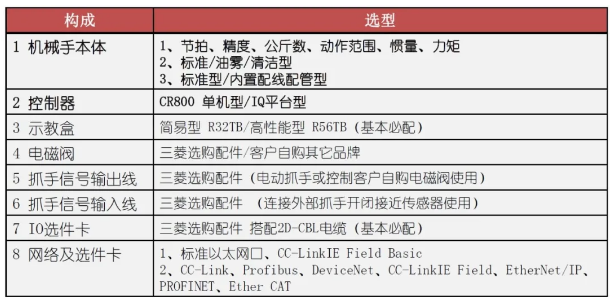
四、三菱电机MELFA系列工业机器人选型常用构成
观看视频快速掌握选型技巧
MELFA FR 系列工业机器人
三菱电机从1982年开始销售工业机器人,经过将近40年的发展,现在的外形小巧、动作灵活、速度快精度高、为提高设备生产效率和产品质量配备了多种软硬件功能。MELFA FR系列是通过新的智能化解决方案,实现更为简单、先进、柔性制造的“下一代自动化”。高刚性、高静定性的特点,决定了三菱电机FR系列机器人的在速度与精度的综合性能上处于行业内的较高水准。
MELFA FR系列提供的三大支柱
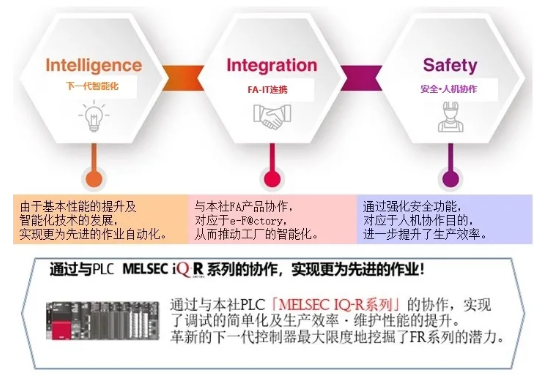
主要特点:
选件:机器人可以选配CC-Link、CC-Link IE Field、EIP、Profinet等网络板卡,可以连接到多种网络系统中。除此之外还可以选配电磁阀、抓手电缆、力觉传感器等配件,充分发挥了我们机器人产品的实用性。
软件:RT ToolBox3是机器人编程调试软件,MELFA Works是用于机器人动作模拟的模拟软件。