港口集装箱锁具拆卸3D定位引导
2019/6/20 10:29:11
导语:随着无人化码头的逐渐普及,先前集装箱卡车人工拆卸锁头的应用逐渐开始被机器人+3D视觉的方式慢慢替代。 工人在不停的重复相同的工作的时候,可能会因为疲倦或者是机械性的重复导致的厌倦或多或少的造成一些工作上的偏颇。但是机器人不会,机器视觉更不会。
行业介绍
随着无人化码头的逐渐普及,先前集装箱卡车人工拆卸锁头的应用逐渐开始被机器人+3D视觉的方式慢慢替代。
工人在不停的重复相同的工作的时候,可能会因为疲倦或者是机械性的重复导致的厌倦或多或少的造成一些工作上的偏颇。但是机器人不会,机器视觉更不会。
因此自动化集装箱码头的改造自然变成了重中之重。
市场前瞻
全国乃至全球的集装箱码头目前都是用人工进行锁头的拆装的,所以这里面的自动化改造的潜力无疑是巨大的。
一个工位就至少需要6~8台机器人及6~8台3D相机,一个小型码头的工位数量大概在20个左右。
这意味着一个小型的码头就有100+台的潜力需求,这放眼到全国乃至全世界潜力是异常可观的。
检测项目
1.锁具有无
2.锁具类型
3.提供锁头位置和姿态
4.新型号的自学习
方案概述
1.将SICK的TriSpector 3D相机安装于机器人的第六轴上,通过手眼标定将相机和机器人的姿态和位置完全对齐。
2.机器人做匀速运动,带动TriSpector去扫描集装箱下方的锁头,先识别出锁头的种类后,进行定位,最后拆卸。
3.对拆锁位置进行二次检测,确保锁头不存在后,一个周期结束。
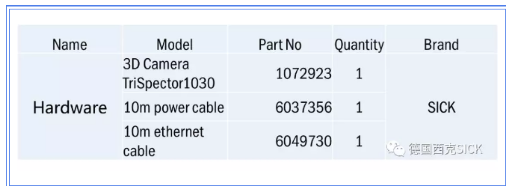
视觉系统组建

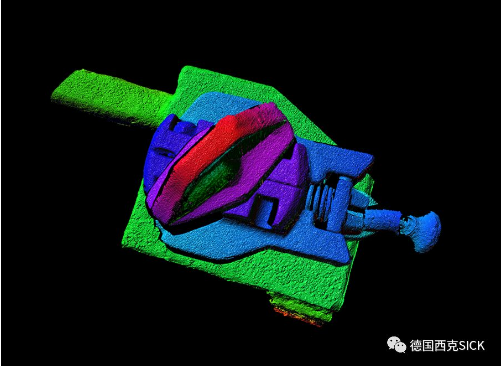
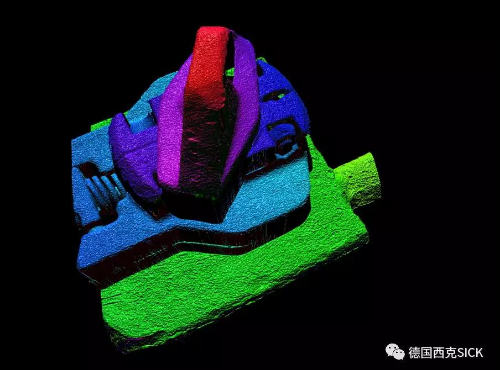
产品展示

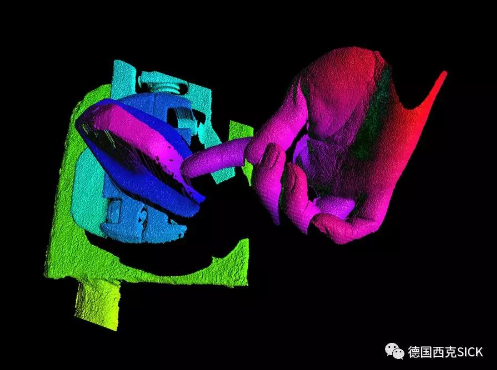
锁头三维图象

产品性能
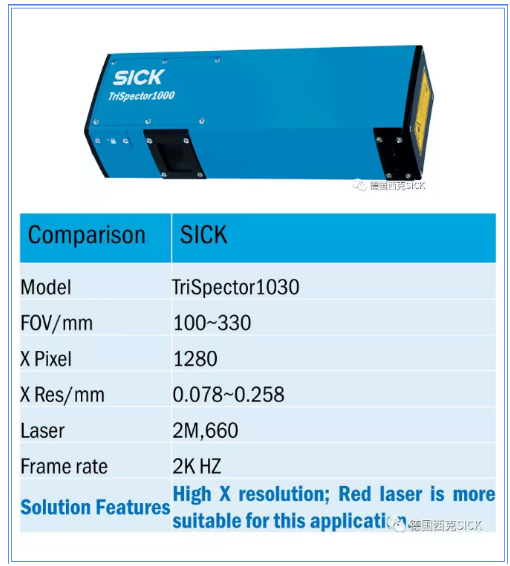
产品配置