





酷炫3D科技—TOF 3D相机

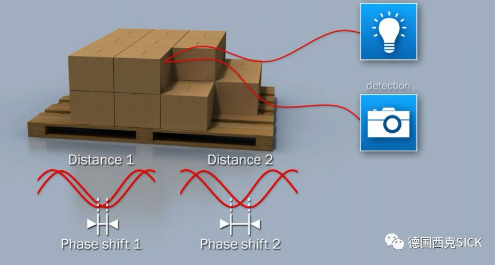
SIONARY - T为一款TOF三维相机,采用三维快照(3D Snap-shot)技术,可静态获取有效的三维数据,每个像素点均可测量光信号在传感器与摄像机之间的飞行时间。借助发射光信号与反射光信号之间的时间相位差测得飞行时间,从而算得摄像机与物体之间的距离。不同的相位差对应于不同的距离。单次拍摄中采集到的数千个像素点 (Pixel) 以这种方式提供整个检测范围内的详细三维距离图,并通过以太网等总线输出。客户可根据获取到的三维数据实现个性化应用
客户受益
✔高速传输速率,千兆以太网接口输出,传输速率最高可达50帧/S单帧可以捕获包含25,000(144*176)个像素点,输出数据包含距离值、灰度值和置信度;
✔视野范围大,69°* 56°;检测距离:0.5 ~ 7.3m,可满足机器人的快速移动的响应要求;
✔环境抗噪性强,使用环境温度0~50°, IP67, 抗干扰0-50kLux;
✔灵活、稳定的数据输出,使用SICK免费的调试软件SOPAS,可直接读取或者修改传感器参数、设置检测距离、曝光强度、数据输出类型和坐标等,数据量可根据应用要求进行缩减;并且可提供API接口(可支持Matlab, Java, Python, C#,C++),支持ROS等;
✔产品提供CX,AG,DT 3个版本可供灵活应用
Visionary –T CX:输出全部三维数据(像素平面距离、灰度值和置信度值),数据量较大,无筛选或者压缩;
Visionary –T AG: 可进行数据缩减,输出极坐标数据和笛卡尔坐标数据的选配功能;
Visionary –T DT: 无需二次开发, 控制设备信号的开关量输入输出 ;
技术优势

基于TOF的深度相机类似激光雷达传感器,利用的是红外光的时间飞行原理(Time Of Flight)进行检测,但不同的是其检测的并非单点光,而是面阵光。相机内部含有CMOS光学接收芯片,并且芯片中每个像素点均能独立获取射进来光点的时间差,从而计算出不同像素离物体的距离。其优点为可单帧捕获物体的三维轮廓信息,检测距离相对超声波远,精度比双目视觉高,成本低于激光雷达,并且输出数据量适中,为室内机器人进行主动避障的其中一种较好选择;

福利来了
下一代酷炫3D产品Visionary-S基于结构光原理(由一组投影仪和摄像头组成的系统结构)即将强势登陆,相比Visionary-T具有更高的检测精度,(640px x 512px,2.5m检测范围检测精度6mm,重复精度4mm)

声明:本文内容由企业提供,如涉及版权、机密问题,请及时联系我们删除(QQ:630072961),不便之处,敬请谅解!