
TwinCAT实现机器人与标准运动控制系统之间同步
http://www.gkong.com 2009-07-28 16:47 来源:德国倍福自动化有限公司
TwinCAT 自动化软件现在能够将机器人(Delta kinematics, SCARA)以及它们与现有运动控制功能之间的互动和同步整合在一起。从而能够无缝集成到整个系统中,无需使用附加的机器人 CPU。Beckhoff 基于 PC 的控制器将 PLC、运动控制和机器人技术整合到一个硬件和软件平台上 ― 是实现前沿的“科学自动化”的一个重要组成部分。
“TwinCAT 运动转换”软件是实现将机器人控制技术集成入 TwinCAT 自动化软件包的第一步。 PLC、运动控制、HMI 和机器人控制功能在一个功能强大的工控机 CPU 上运行。这可为用户带来很多好处:
- 机器人控制无需使用附加的 CPU
- 降低工程成本:在一个系统内进行配置、参数设置和诊断
- Beckhoff 知名的符合全球标准的 TwinCAT 自动化软件被用于配置、编程和诊断
- 由于采用的是单一的 CPU 系统,从而解决了 PLC、运动控制和机器人技术采用多个 CPU 所带来的摩擦损耗问题
- 由于采用了直接接口,性能和精度都得到提升;无需 CPU 之间复杂的通讯
TwinCAT 运动转换软件自身被透明地集成在现有的运动控制系统中:机器人和运动控制功能能够借助 TwinCAT NC PTP(点到点轴定位)或 NC I(三维轴插补)实现优化同步。所有的 NC 特点,比如“电子凸轮”或“飞锯”(从轴与运动中的主轴同步)能够结合起来构成一个所需的通用硬件和软件平台。
TwinCAT 支持各种并联机器人和串联机器人运动,如那些用于实现取放任务的机器人运动。编程方面,使用的是基于 TwinCAT NC I 和 G 代码(DIN 66025)的软件。目标坐标可在笛卡尔坐标系内方便地编程。运动模块负责转换相应的电机位置(逆向转换)。此外,也可将用于预控制扭矩的动态模型考虑在内。
运动系统可在 TwiCAT 系统管理器内方便地选择。运动通道被用来设置类型(例如 Delta)、进度条长度和偏移量等参数。可为动态预控制指定好质量和质量惯量。例如,借助“飞锯”和“电子凸轮”功能,机器人可与取放工件用的传输带同步。这些应用在物料搬运和包装行业中常常会遇到。
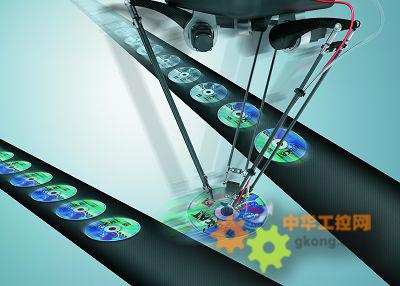
“TwinCAT 运动转换”软件用于取放应用;机器人和运动控制功能可借助 TwinCAT NC PTP 或 NC I 实现优化同步。
关于德国倍福
德国倍福(BECKHOFF)自动化有限公司总部位于德国威尔市。公司在世界各地设有分支机构,加上全球的合作伙伴,目前公司业务已遍及60多个国家。
倍福始终以基于PC的自动化新技术作为公司的发展理念,所生产的工业电脑、现场总线模块、驱动产品和TwinCAT控制软件构成了一套完整的、相互兼容的控制系统,可为各个工控领域提供开放式自动化系统和完整的解决方案。近20年来,倍福的元件和系统解决方案在世界各地得到了广泛的应用,以其“自动化新技术”为工业自动化的所有领域创立了一个标准。
自2001年3月倍福成立北京代表处以来,公司在中国的业务迅速发展,先后成立了上海代表处和广州代表处。随着各种具有良好性价比的新产品、新技术不断进入中国市场,其勇于打破传统控制模式,倾力推广PC控制新技术的理念已被越来越多的中国用户所接受。如需了解更多信息,请登陆 Beckhoff 中文官方网站http://www.beckhoff.cn/。
编辑精选
工控原创
- ▪ 西门子Eigen工程智能体落地中国,工业AI跨越物理世界“确定性”拐点
- ▪ 与哈金森达成战略合作,乐聚机器人何以持续获得工业巨头青睐?
- ▪ 珍・赫夫纳当选国际机器人联合会新任主席
- ▪ 雷赛智能上半年净利预增超55% 定增募资11.44亿加码核心部件研发
- ▪ 上半年收官!2026年6月工业自动化月度资讯汇总
- ▪ 十年深耕国产测控,简仪科技发布AI时代新战略
- ▪ 5 月 RatingDog 中国通用制造业 PMI 为 51.8 通胀压力半年来首次缓解
- ▪ NVIDIA 和宇树科技宣布推出 H2 Plus 以推进人形机器人研究
- ▪ 2026 五月智造潮工业自动化月度盘点!
- ▪ 报告:物理AI发展提速,软件已成机器人创新最大瓶颈


