
新闻详情
英硕研发出多支腿平台机电调平系统
http://www.gkong.com 2008-12-05 10:03 来源:上海英硕自动化科技有限公司
英硕公司近期成功研发出了具有6,8,10条支腿的多点大型平台的机电调平系统,该系统在试验样机上取得了十分理想的工作效果,达到了业内领先水平,系统具有下列明显性能特点:
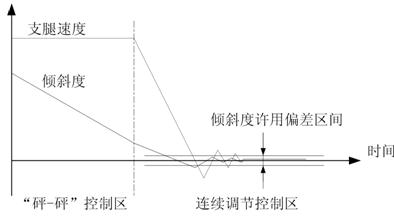
1) 调平速度快,精度高,实测数据表明,支腿从撤收位置开始架设与自动调平,全部时间不超过2分钟(与工作行程有关),水平调节精度可达到45角度秒之内,这样的指标对于长约10米,宽约3米的平台面来说,无疑是可以称道的。实际上,高精度的控制效果完全依赖于科学而精密的控制算法,在整个调整的过程中,平台支腿的标称速度是按照下面的规律变化的:
1) 支腿抓地稳定无“虚腿”,且结构受力分布均匀可调控,在多点支承的调平系统中,我们在业内率先实现了支腿受力分布的调控工作模式,这使得支腿触地更加可靠和快速,且在调平后可在保证水平度的前提下,实现各支腿的受力均匀化的调控。
2) 调平的最终中心高度具有极好的可重复性,同时,在同一中心高度位置上,系统不仅可以重复多次进行立即调平,且可实时自动校正由于外界扰动因素引起的水平度的漂移。
3) 支腿运动副具有完备的多重保护:
a) 电气限位保护,由电气限位开关实现;
b) 软件限位保护,由伺服电机的相位计算实现;
c) 安全力矩保护,由电机工作的保护力矩设定实现;
4) 系统人机界面友好,可实时显示XY轴水平度,每个支腿的升降运动状态,限位状态,触地状态及错误告警状态等,通过触摸液晶显示屏的使用,更有水平度、受力状况的实时数字显示及历史记录,实现了系统信息的全面可视化。另一方面,手持线控盒与主面板的双人机界面操作,对使用者而言,安全而且方便。
5) 电气设计上高度精简,CAN总线的运用,实现了控制器与伺服驱动器的数字化接入,提供了运动信息的全面监控。
6) 机械结构上采用丝杠与电机安全制动器的双重自锁,使得平面的水平稳定度得以持久保持。
7) 非常情况下,支腿可以手摇低速升降。
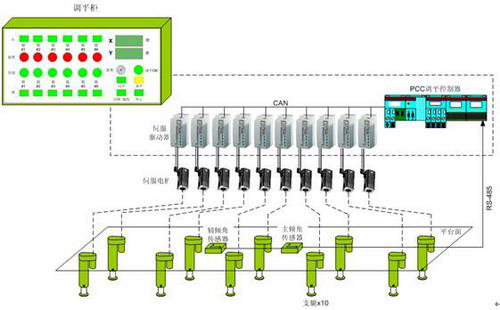
电气系统方面,由调平PCC控制器、伺服电机与驱动器、水平倾角传感器以及调平机柜、人机界面、传感器与伺服电机电缆构成;机械机构方面,调平系统的执行机构由电机驱动的调平支腿构成,其结构由丝杠(滑动/滚动)、套筒、支承单元、安装座和电气限位开关等构成。系统如下图所示:
1) 调平速度快,精度高,实测数据表明,支腿从撤收位置开始架设与自动调平,全部时间不超过2分钟(与工作行程有关),水平调节精度可达到45角度秒之内,这样的指标对于长约10米,宽约3米的平台面来说,无疑是可以称道的。实际上,高精度的控制效果完全依赖于科学而精密的控制算法,在整个调整的过程中,平台支腿的标称速度是按照下面的规律变化的:
1) 支腿抓地稳定无“虚腿”,且结构受力分布均匀可调控,在多点支承的调平系统中,我们在业内率先实现了支腿受力分布的调控工作模式,这使得支腿触地更加可靠和快速,且在调平后可在保证水平度的前提下,实现各支腿的受力均匀化的调控。
2) 调平的最终中心高度具有极好的可重复性,同时,在同一中心高度位置上,系统不仅可以重复多次进行立即调平,且可实时自动校正由于外界扰动因素引起的水平度的漂移。
3) 支腿运动副具有完备的多重保护:
a) 电气限位保护,由电气限位开关实现;
b) 软件限位保护,由伺服电机的相位计算实现;
c) 安全力矩保护,由电机工作的保护力矩设定实现;
4) 系统人机界面友好,可实时显示XY轴水平度,每个支腿的升降运动状态,限位状态,触地状态及错误告警状态等,通过触摸液晶显示屏的使用,更有水平度、受力状况的实时数字显示及历史记录,实现了系统信息的全面可视化。另一方面,手持线控盒与主面板的双人机界面操作,对使用者而言,安全而且方便。
5) 电气设计上高度精简,CAN总线的运用,实现了控制器与伺服驱动器的数字化接入,提供了运动信息的全面监控。
6) 机械结构上采用丝杠与电机安全制动器的双重自锁,使得平面的水平稳定度得以持久保持。
7) 非常情况下,支腿可以手摇低速升降。
电气系统方面,由调平PCC控制器、伺服电机与驱动器、水平倾角传感器以及调平机柜、人机界面、传感器与伺服电机电缆构成;机械机构方面,调平系统的执行机构由电机驱动的调平支腿构成,其结构由丝杠(滑动/滚动)、套筒、支承单元、安装座和电气限位开关等构成。系统如下图所示:
编辑精选
工控原创
- ▪ 与哈金森达成战略合作,乐聚机器人何以持续获得工业巨头青睐?
- ▪ 珍・赫夫纳当选国际机器人联合会新任主席
- ▪ 雷赛智能上半年净利预增超55% 定增募资11.44亿加码核心部件研发
- ▪ 上半年收官!2026年6月工业自动化月度资讯汇总
- ▪ 十年深耕国产测控,简仪科技发布AI时代新战略
- ▪ 5 月 RatingDog 中国通用制造业 PMI 为 51.8 通胀压力半年来首次缓解
- ▪ NVIDIA 和宇树科技宣布推出 H2 Plus 以推进人形机器人研究
- ▪ 2026 五月智造潮工业自动化月度盘点!
- ▪ 报告:物理AI发展提速,软件已成机器人创新最大瓶颈
- ▪ 乐聚智能创业板 IPO 获受理,拟募资 26 亿元
版权所有 工控网 Copyright©2026 Gkong.com, All Rights Reserved


