
MIT跳跃机器人挑战月球行走
http://www.gkong.com 2010-08-24 11:29 来源:电子工程专辑
跳跃(hopping)机器人的设计目标是为了解决“勇气号”火星漫游者这样的轮式机器人所遇到的问题。“勇气号”目前陷在火星的沙坑里。NASA宇航员Jeffrey Hoffman说,如果它装载着跳跃系统,将可以直接跳回坚实的土地。Hoffman现在是麻省理工学院的教授。
麻省理工与Charles Stark Draper实验室合作设计了地面人工月球、低重力仿真器(Terrestrial Artificial Lunar and Reduced Gravity Simulator,简称Talaris),挑战Google Lunar X大奖。该奖项的3,000万美元奖金将颁发给首个将机器人发送到月球上,行进500米,将照片和数据传回地球的私人资助团队。麻省理工与Draper组合的“下一次大飞跃”(Next Giant Leap)团队与其它二十余个团队一同争夺该奖项。
麻省理工将会在今年的美国航空航天大会上公布项目的细节。会议将于8月30日至9月2日在加州阿纳海姆举行。
火星漫游者已经在火星表面行进数公里,进行了大量探索,证明了移动机器人平台的价值。但Talaris的开发者们表示弹跳能力可以让探索距离再延长数百公里。
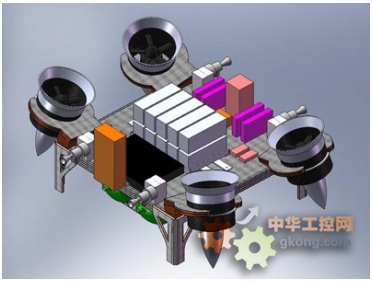
组装完毕的Talaris示意图。(图片来源:麻省理工学院)
Hoffman说:“有了跳跃器,在遇到轮子无法进入的地区时,就可以跃进去,搜集完数据再跃出来。”
这个已经持续两年时间的项目已经造出了一个缩小的3英尺宽的原型机,用来测试导航、控制软件。这些软件让hopping机器人可以自主探索未知地形。推进系统采用压缩氮气。Talaris是个矮胖的四方形平台,上面可以装载传感器,通过氮气跃起,再通过控制软件实现悬停、侧移,并完成安全着陆。
面朝下方的电导管风扇提供了持续的“升力”以反制重力,让Talaris可以模拟其它星球上的重力环境。这样一来机器人就能够在地球上测试月球环境下的表现。风扇转速可以调节,以模拟不同的星球环境。
hopping机器人的主要缺点是压缩氮气的储备迟早会用完。研究人员正在寻求通过太阳能电池等可再生能源重载氮气的办法。跳跃系统在实际使用中可以作为备选动力方案,在漫游者的轮子陷入沙地后使用。
研究人员希望能在今年年底演示重达110镑,可以跃起20米高的原型机。全尺寸的漫游者预期在2014年完成冲击Google Lunar X大奖的准备。他们正在和太空船专家Sierra Nevada公司合作,准备用一种载具将Talaris送上月球。Draper实验室正在设计最终型号以及安全着陆系统。
编辑精选
工控原创
- ▪ 与哈金森达成战略合作,乐聚机器人何以持续获得工业巨头青睐?
- ▪ 珍・赫夫纳当选国际机器人联合会新任主席
- ▪ 雷赛智能上半年净利预增超55% 定增募资11.44亿加码核心部件研发
- ▪ 上半年收官!2026年6月工业自动化月度资讯汇总
- ▪ 十年深耕国产测控,简仪科技发布AI时代新战略
- ▪ 5 月 RatingDog 中国通用制造业 PMI 为 51.8 通胀压力半年来首次缓解
- ▪ NVIDIA 和宇树科技宣布推出 H2 Plus 以推进人形机器人研究
- ▪ 2026 五月智造潮工业自动化月度盘点!
- ▪ 报告:物理AI发展提速,软件已成机器人创新最大瓶颈
- ▪ 乐聚智能创业板 IPO 获受理,拟募资 26 亿元


