
Energid研发出一种用于水果采摘的机器人
http://www.gkong.com 2010-08-30 11:09 来源:Energid
Energid获得美国农业部的资金正在开发一种收获柑橘的机器人。所开发的机器人具有机器视觉和操作的能力,适用于收获柑桔,苹果,以及其他种类的水果。 Energid科技公司的方案结合了机器人的智能和批量收获的经济性。使用一个低成本的机制,通过视觉传感器和高速的计算机进行信息处理和控制。水果摘取的末端执行器为一次性使用,可快速更换,维修费用低廉。该系统可以远程或附近控制,系统的设计目标是,每秒钟摘取32 个水果,持续摘取16次,留在树上的水果将少于4%。
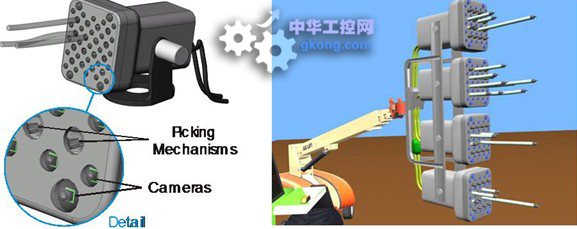
该水果采摘系统有多个网格盘,每个网格盘有16个气动驱动采摘装置,通过许多相机的视觉反馈引导采摘装置末端执行器剪断水果的茎。一个完整的系统将有1-4个网格盘(上图右侧显示4个网格盘系统)。
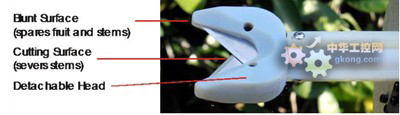
在每个网格的摘取装置可以安装有多种类型的末端执行器。大部分是简单固定的结构用于剪断水果的茎而不碰伤水果,如下面的图所示,锋利的刀面用于剪断茎, 圆滑表面的护套防止破坏水果。执行器头部容易拆卸,便于更换其他类型的末端。
Energid将柑橘采摘技术和已为美国宇航局,导弹防御局(MDA)和商业客户开发的三维视觉技术结合,在此课题中将利用如下图所示对三维物体遮挡,形状和运动分析的技术。
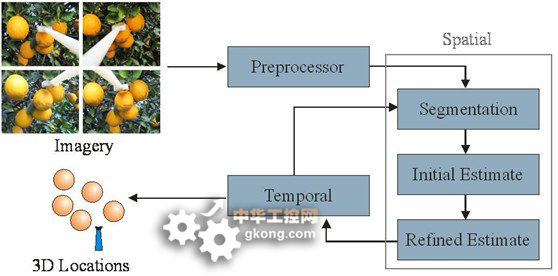
上图显示了视觉系统的组成。输入包括网格中的3-4摄像机图像。输出包括水果的识别,三维位置和采摘水果的机制。图像处理包括将物体与背景分割,初成像,改善成像三个模块。 此三个模块在同一时间分析同一帧图像。另外一个时间模块,随时间动态分析图像。
设计的重点放在水果观测,采摘机制的可行性,整体系统的设计几个部分,并通过试验,数字仿真,实验室研究和实地验证等手段不断改进和完善产品的设计。该系统将有可能摘除可以看到水果的99%。水果的数目可以使用网格相机观察到,Energid建立的视觉系统将能看到在树上超过98%的水果。Energid正在开发的这一个低成本采摘系统,其制造和使用这种系统的成本将比手工采摘的成本低廉。
编辑精选
工控原创
- ▪ 与哈金森达成战略合作,乐聚机器人何以持续获得工业巨头青睐?
- ▪ 珍・赫夫纳当选国际机器人联合会新任主席
- ▪ 雷赛智能上半年净利预增超55% 定增募资11.44亿加码核心部件研发
- ▪ 上半年收官!2026年6月工业自动化月度资讯汇总
- ▪ 十年深耕国产测控,简仪科技发布AI时代新战略
- ▪ 5 月 RatingDog 中国通用制造业 PMI 为 51.8 通胀压力半年来首次缓解
- ▪ NVIDIA 和宇树科技宣布推出 H2 Plus 以推进人形机器人研究
- ▪ 2026 五月智造潮工业自动化月度盘点!
- ▪ 报告:物理AI发展提速,软件已成机器人创新最大瓶颈
- ▪ 乐聚智能创业板 IPO 获受理,拟募资 26 亿元


