
德国研制出会搬送箱子和沏茶的机器人Rollin’ Justin
http://www.gkong.com 2011-12-01 15:16 来源:Gkong整理
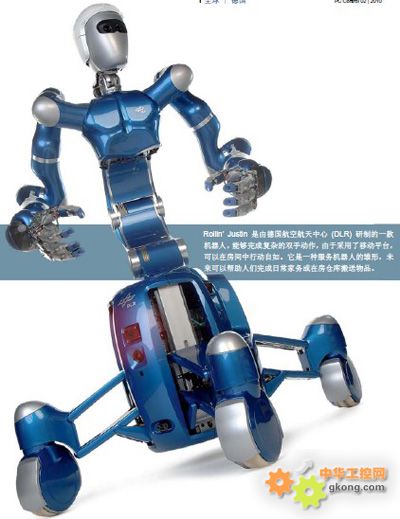
近年,仿人机器人的研发取得了重大进展。Rollin’ Justin 是由德国航空航天中心 (DLR) 研制的一款机器人,能够完成复杂的双手动作,由于采用了移动平台,可以在房间中行动自如。它是一种服务机器人的雏形,未来可以帮助人们完成日常家务或在仓库里搬送物品。对运动顺序至关重要的快速通讯通过 EtherCAT 来实现,与此同时,由倍福的 TwinCAT PLC 自动化控制软件实现精细的控制。
德国航空航天中心(DLR)位于德国 Weßling 市,Rollin’ Justin 机器人是其十多年的研究成果。这种人形移动式机器人是在由DLR研发的轻型机械臂和机械手基础上研制而成(例如,用于太空维护工作的机械臂和机械手)。通过旋转和移动底座可扩大机器人的抓取范围,底座装有4条独立的、可灵活伸缩的机械腿。这与人通过身躯和腿的运动扩大活动半径相类似。“Rollin’ Justin上半身可自由旋转 43 度,并配有扭转传感器;共有 51 个关节,可以完成高度灵活的运动,,能够灵敏地进行操作和交互运动。该机器人的双手可以娴熟地操作物体,例如搬移木箱或者沏茶。后者需要复杂的动作协调性。机器人必须一只手抓住茶叶罐,另一只手旋开它。然后,将茶叶粒倒入饮用玻璃杯。此时,通过手指轻扣塑料容器,精确地控制茶叶用量。最后将水从水瓶倒入茶杯。
扭矩传感器实现敏捷操作
这是如何进行动作协调并完成高灵活动作的呢?据了解,视操控动作的不同,需要较松或较紧地协调手臂和手的动作:例如,抓起如木箱之类的大型物体时,两个手臂必须紧密地协调工作。另一方面,旋开螺帽,要求手和臂完成良好的同步运动。此外,Rollin’ Justin 也可以与人和周边环境进行互动。当撞到某物或者触碰到物体或者人时,它可以感知并立即中止动作,或者询问是否应继续工作。通过集成的语音识别系统,该机器人可识别约 100 个单词且能将其组成有意义的短语。此外,它还可以通过内置摄像头采集周围环境信息并识别目标,从而调整自己的运动方向。如在手指中安装扭矩传感器,确保 Rollin’ Justin 可以灵敏地抓起像草莓之类的物体且不挤碎它们。机器人的脚的活动范围可调:当执行高动态性动作或者大范围移动动作时,Rollin’ Justin 可伸展开腿,扩大底盘范围,从而稳定上部躯体。需要穿过狭窄通道时,它会再次缩回腿。

“通过 EtherCAT,我们找到了理想的通信系统.”Klaus Kunze,来自德国航空航天中心机器人系统部机器人与机械电子研究所。他说,“研制Rollin’ Justin 时,使用第三方供应商成熟的硬件组件,使我们节省了大量耗时的研发工作。”“我们主要根据所需的目标功能和紧奏型设计来选择组件。”
然而,这给德国航空航天中心带来的挑战是:必须整合各种不同的实时协议。采用了通过 CAN、CANopen、SERCOS、SpaceWire 和 EtherCAT等实现通信的组件。这些不同现场总线之间的转换由 EtherCAT 从站上的倍福 TwinCAT PLC 自动化软件完成。控制所需全部数据均通过 Matlab®/Simulink® 环境中的一个具有实时功能的总线协议同步传输。该环境安装在一台独立的实时计算机上,并由该计算机控制整个平台(包括机器人上部躯体)。“我们需要这样一个解决方案,一方面支持这些组件的通信技术,另一方面不影响这些组件的性能。例如,可以实现 1 毫秒的 SERCOS 驱动周期时间和较短的静区时间。”Klaus Kunze 说。通过倍福的标准 EtherCAT 端子,完美地实现了力传感器和伺服驱动的连接。倍福的 SSI 终端从机器人腿的位置传感器采集数据。机械臂和躯干的 SERCOS 驱动器则通过倍福的 SERCOS 主站 PCI 插卡连接。Rollin’ Justin 为德国航空航天中心提供了一个优异的试验平台。基于该平台,可以完成计划用于复杂的双手操作任务的控制策略和智能动作。目前来说,将移动式服务机器人用于搬运木箱或沏茶等家务的家庭助手仍然属于将来的一个梦想。
编辑精选
工控原创
- ▪ 珍・赫夫纳当选国际机器人联合会新任主席
- ▪ 雷赛智能上半年净利预增超55% 定增募资11.44亿加码核心部件研发
- ▪ 上半年收官!2026年6月工业自动化月度资讯汇总
- ▪ 十年深耕国产测控,简仪科技发布AI时代新战略
- ▪ 5 月 RatingDog 中国通用制造业 PMI 为 51.8 通胀压力半年来首次缓解
- ▪ NVIDIA 和宇树科技宣布推出 H2 Plus 以推进人形机器人研究
- ▪ 2026 五月智造潮工业自动化月度盘点!
- ▪ 报告:物理AI发展提速,软件已成机器人创新最大瓶颈
- ▪ 乐聚智能创业板 IPO 获受理,拟募资 26 亿元
- ▪ 施耐德电气加入世界经济论坛灯塔运营系统顾问委员会,共推开源制造蓝图


