
柔性机器人新突破:意大利COMAN机器人
http://www.gkong.com 2013-04-17 16:42 来源:福布斯中文网
过去十年里开发的大多数人形机器人都是刚性关节,如果它们要与人进行互动就会出现问题。假使不小心打到人或者失去平衡而摔倒,它们那不能弯曲的双臂和双腿就可能会对人造成伤害。近来,研究者们在开发各种刚性标准的机器人关节方面表现出越来越浓厚的兴趣,这将提高机器人的安全性,但到目前为止还鲜有团队造出了一个完整的机器人成品。如今,意大利技术研究所(Italian Institute of Technology,简称IIT)的一支团队凭借他们的COMAN机器人(柔性人形机器人)正逐渐接近这一目标。

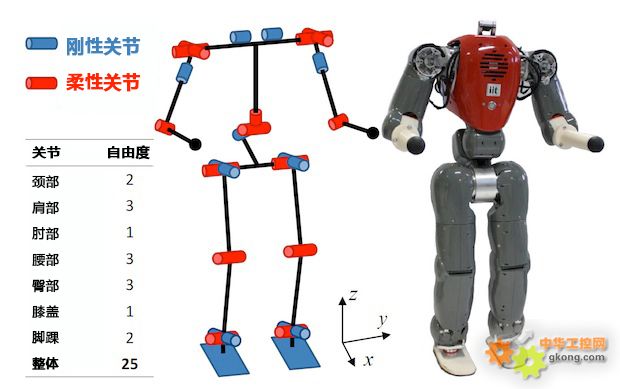
仿照四岁孩子而造的COMAN,身高94.5厘米(从脖子到脚),体重31.2千克。该25自由度(DOF)机器人结合了刚柔两种关节(如下图所示)。柔性关节(14 DOF)依靠的是串联柔性制动器。这些由IIT团队定制的制动器被应用于弯曲或伸展的机械臂和机械腿上。这些制动器既小巧又模块化,该特点使之成为打造如人形机器人等多自由度机器人的理想材料。研究者们也为每个弹性关节开发了定制的力矩传感器,包括用于踝关节的一个六维力/力矩传感器。
那么这种柔韧性究竟有何帮助?弹性制动器为COMAN走路增加了弹簧:在行走实验中,“无需施加额外的控制,机器人的躯壳就自然吸收了每走一步时地面的反作用力。而如果没有特定的足部装置或者不加以主动控制,刚性制动的类人机器人很难实现这一点。”当施加以稳定操控方式时,即使是在移动的平台上或是翻倒时,机器人也能稳定住自己。
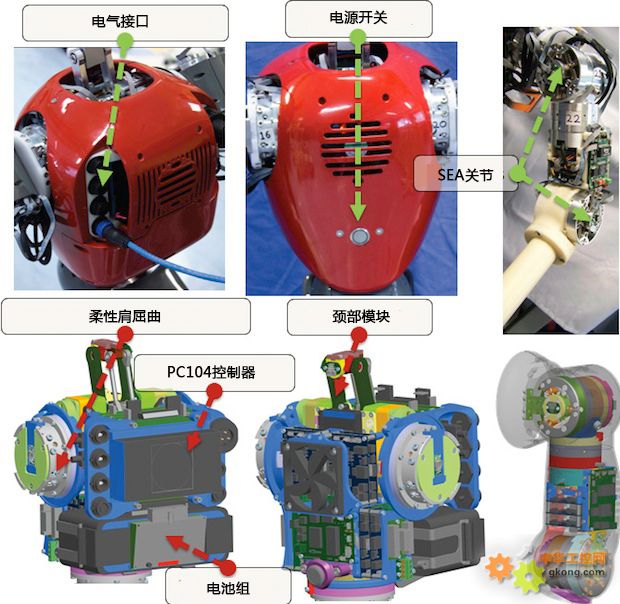
COMAN的内部结构由钛合金、不锈钢和铝合金制成,包裹以ABS塑料外骨骼。以下图片显示了串联弹性制动器(SEA)的位置和结构,SEA分布于机器人的臀部、膝盖、脚踝、肩膀和手肘处。

在自己开发柔性人形机器人的过程中,该团队还发明了一种方法以确定最优关节弹性,但该方法是一个极为耗时的试错过程,迄今仍缺乏足够的数据支撑。他们的方法是基于共振分析和储能最大化标准,为其他探索柔性机器人的研究者们提供了一个框架。
较早一些探索柔性关节的机器人包括早稻田大学的Wendy(1998)和Twendy-One(2007),这些服务性机器人旨在辅助老年人。出于安全原因,它们使用专门开发的关节装置打造了柔性手臂,但这种关节装置稍显笨重。最近,拓荒者机器人学公司(Meka Robotics)制造了一个有着柔韧手臂的人形机器人,而三星(Samsung)的Roboray和德国航空航天中心(German Aerospace Center)的DLR-Biped则拥有力矩控制的机器腿。再思考机器人公司(Rethink Robotics)的Baxter也有柔韧的双臂。
不过,在打造同时具有柔性双臂和双腿的人形机器人方面,IIT团队当属领头羊。该团队的成员包括尼克斯•G•萨格雷基斯(Nikos G. Tsagarakis)、史蒂芬•莫非(Stephen Morfey)、古斯塔沃•梅德拉诺•塞尔达(Gustavo Medrano Cerda)、李志斌(音)和达尔文•G•考德威尔(Darwin G. Caldwell)。如果你想知道为什么这个机器人没有头,别担心:它的脑袋正在研发中。我们听说,研究者们还完成了一双机器手。我们期待将很快有更多新部分整合到这个机器人身上。
编辑精选
工控原创
- ▪ 四月工业自动化领域动态全览!
- ▪ 汇川技术年营收首破 450 亿 新兴业务加速跑 一季度利润承压不改长期布局
- ▪ 黑湖科技完成近 10 亿元 D 轮融资 加速工业AI应用落地和全球扩张
- ▪ 思科工业AI报告:规模化落地全面提速 三大核心要素决定转型成败
- ▪ ADI:人形机器人爆发背后,连接与感知仍是关键挑战
- ▪ 春启智造新篇!2026年3月工业自动化资讯全览
- ▪ 当AI跨越虚实鸿沟,西门子如何在物理世界重写工业规则?
- ▪ 会造成工控系统失控等安全风险!工信部旗下单位发布工业领域OpenClaw应用风险通报
- ▪ ABB机器人携手英伟达 加速工业级物理AI规模化落地
- ▪ 舍弗勒宣布乐聚为首个中国具身智能合作伙伴,人形机器人走向全球产业协同


