
上海交大机器人:高峰教授团队的杰作
http://www.gkong.com 2015-05-27 14:05
在化石能源日益枯竭并因此造成严重污染的今天,核能作为相对清洁的能源,越来越受到世界各国的重视和广泛应用,然而,鉴于其一旦发生事故,其后果的严重性也令人们疑虑重重。
我国在核能的开发和利用上,既大胆发展,又谨慎防范。即将于2015年7月8日在上海国家会展中心举行的2015 中国国际机器人展览会上,人们将有机会一睹各类防灾机器人的英姿,其中,由上海交通大学机动学院机械系统与振动国家重点实验室高峰教授团队研发的多款国家973计划“核电站紧急救灾机器人”格外引人关注:带腰仿生六足机器人、带腰六足步行机器人、紧凑带腰六足机器人、铲斗六足机器人、六足仿生步行机器人、六足步行机器人等“六足”人,身形各异,各个身怀绝技,在核电领域有着不可替代的防灾减灾的重要使命。它们都是被列入国家973计划“核电站紧急救灾机器人的基础科学问题研究”(2013CB035500)的重要“人才”。
带腰仿生六足机器人主要用于核辐射等复杂环境下的紧急救灾任务,可以代替救援人员携带检测设备进入发生事故的地点,探测灾后环境,搬运救灾物资等。通过在身体上方安置其它机械臂、消防龙头等,还可以执行开关阀门,清除障碍物以及灭火等作业任务。它可以在湿热、辐射等复杂环境下执行作业任务。
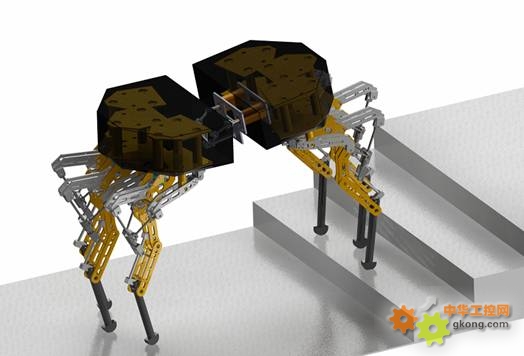
带腰仿生六足机器人
带腰六足步行机器人可以在复杂恶劣的环境下执行救援任务,减少不必要的人员伤亡。它会冲入火灾现场,携带消防器材进行灭火。在地震现场,它可以清理障碍物,协助抢救人员和搬运重要物资。它携带多种传感器,可以将现场环境远程传输到控制端。

带腰六足步行机器人
紧凑带腰六足机器人主要用于复杂环境下的紧急救灾任务,可以代替救援人员携带检测设备进入地形较为狭窄的事故区域,执行探测、清理等作业任务。由于机器人驱动器集中在身体上,经过特殊防护之后,可以在火灾现场或有毒环境中完成救灾任务。

紧凑带腰六足机器人
铲斗六足机器人主要用于复杂环境下的紧急救灾任务,可以代替救援人员携带救援仪器设备进入事故区域,执行搬运、清理事故现场等作业任务。由于机器人驱动器集中在身体上,经过特殊防护之后,可以在火灾现场或有毒环境中完成救灾任务,极大拓展了机器人的使用范围。
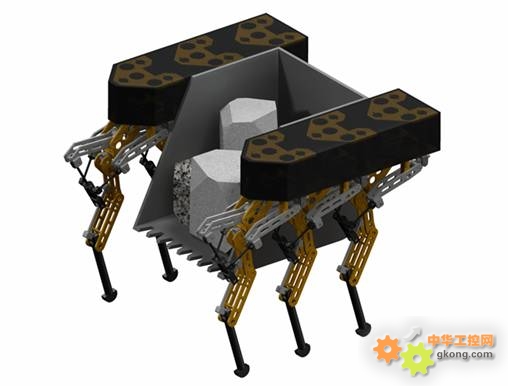
铲斗六足机器人
六足仿生步行机器人主要用于核辐射等复杂环境下的紧急救灾任务,可以代替救援人员携带检测设备进入发生事故的地点,探测灾后环境,搬运救灾物资。通过在身体上方安置其它机械臂、消防龙头等,该机器人还可以执行开关阀门,清除障碍物以及灭火等作业任务。

六足仿生步行机器人
六足步行机器人主要用于核辐射环境下的紧急救灾任务,可以代替救援人员携带检测设备进入发生事故的核电站厂区,探测发生事故后核电站内部情况,同时还可以执行搬运管道,拧动阀门,清理事故现场等任务。
机器人有多种智能控制方式,包括使用智能手机、平板电脑来进行控制。同时机器人还可以响应各种语音指令。
上海交通大学于CIROS2015的展位号为:5.1H-E006,欢迎各界人士前来参观互动。
相关新闻
- ▪ 乐聚携手东方精工建成国内首条年产能万台级人形机器人产线
- ▪ 新品机器人亮相!这家成都公司将“全球大会”开进了车间
- ▪ ABB 发布 Ethernet-APL 科氏力质量流量计
- ▪ 新松港口移动机器人在新加坡港务集团(PSA)实现近 200台大规模部署!首批新型IGV正式交付使用
- ▪ 王兴兴称宇树在工业领域进行试点落地 希望未来机器人自己生产自己
- ▪ 三菱电机携手鹿明机器人共筑具身智能解决方案
- ▪ 库卡入选国家级绿色工厂 | 当“智造”引擎注入“绿色”基因
- ▪ ABB机器人携手英伟达 加速工业级物理AI规模化落地
- ▪ 埃斯顿港股上市,“A+H”双资本平台战略加速国际化布局
- ▪ 舍弗勒宣布乐聚为首个中国具身智能合作伙伴,人形机器人走向全球产业协同
编辑精选
工控原创
- ▪ 春启智造新篇!2026年3月工业自动化资讯全览
- ▪ 当AI跨越虚实鸿沟,西门子如何在物理世界重写工业规则?
- ▪ 会造成工控系统失控等安全风险!工信部旗下单位发布工业领域OpenClaw应用风险通报
- ▪ ABB机器人携手英伟达 加速工业级物理AI规模化落地
- ▪ 舍弗勒宣布乐聚为首个中国具身智能合作伙伴,人形机器人走向全球产业协同
- ▪ 营收首破400亿欧元大关 施耐德电气2025财年交出强劲业绩
- ▪ 高效电机市场强劲复苏,2030年规模预计翻番至31亿美元
- ▪ 美的剥离伺服资产,聚焦核心部件突围
- ▪ 六十载创新积淀,ADI开启边缘智能新篇章
- ▪ “不拥抱就下岗”!朱兴明定调汇川技术2026年:全员AI化


