
优傲官方ROS2驱动已发布
http://www.gkong.com 2022-05-19 16:11 来源:丹麦优傲机器人
优傲官方ROS2驱动已发布
2022年5月4日,优傲及合作伙伴正式发布了可与优傲全产品线适配的ROS2开源驱动 Universal Robots ROS2 Driver。
这是业界较早发布的基于ROS2架构的机器人驱动之一。得益于ROS2架构,此驱动相比于较早发布的UR ROS驱动具有低延迟、高安全性和中间层更加灵活的优点。为方便用户学习使用,软件包中包含可执行的launch file, 并可与MoveIt2结合使用。
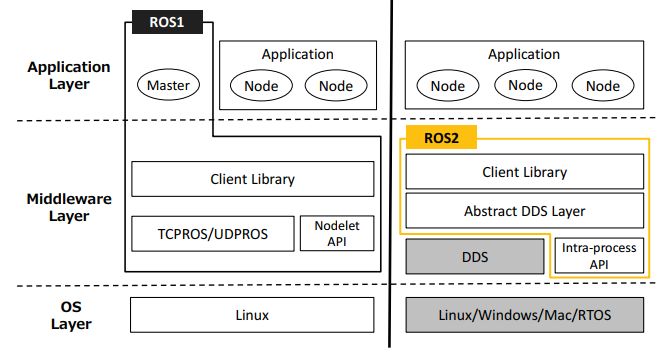
ROS1/ROS2架构比较[1]
得益于优傲机器人系统的开放性和接口多样性,Universal Robots ROS2 Driver可与控制器进行运动指令、位置、速度、力、IO及安全状态的交互。当与实际机器人通讯时,可获取机器人运动学标定数据,以进行更为精确的运动控制。同时,此驱动也可与优傲机器人离线仿真器URSim通讯,加快您的项目开发测试进度。
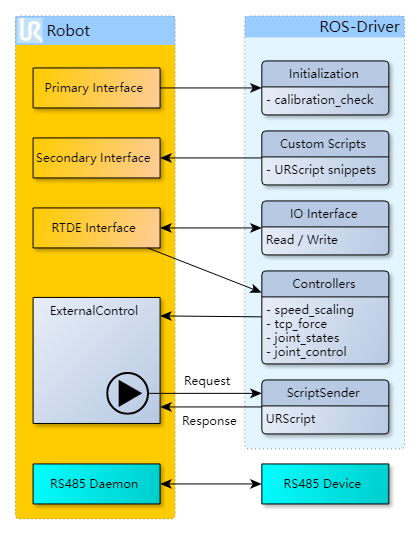
ur_robot_driver架构概览[2]
为使ROS2规划的路径在机器人上更加准确的实现,除了经典的关节轨迹控制器之外,Universal Robots ROS2 Driver在路径规划中加入了速度缩放控制器(speed scale joint trajectory controller)。该控制器将机器人实际速度比率及安全状态纳入轨迹规划算法,减小由机器人实际速度比率、安全限制等造成的轨迹执行偏差[3],从而实现了以下功能:
- 急停及安全停止时的程序暂停
- 急停及安全停止后的程序重启
- 自动调整速度使其符合安全设置
- 在示教器上手动调整速度
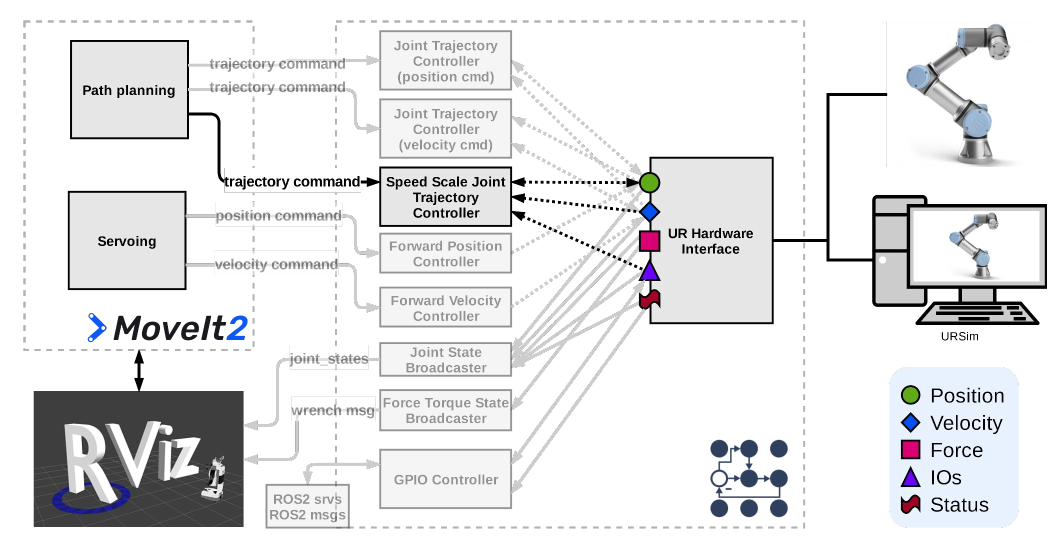
Universal Robots ROS2 Driver控制器概览[4]
最新版本Universal Robots ROS2 Driver现在可在ROS2 Galactic Geochelone版本中通过rosdep binary安装,并将支持Rolling Ridley 和 Humble Hawksbill版本。安装指南及更多信息请见(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver),或参考ROS World 2021报告(https://vimeo.com/649651707)及演示文稿(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/blob/main/ur_robot_driver/doc/resources/2021-10_ROS_World_2021_Making_a_robot_ROS2_powered.pdf)。
有任何问题和反馈请您在GitHub issue(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/issues)或UR forum(https://forum.universal-robots.com/)中提出,或直接发送邮件至ROS@universal-robots.com
祝您开发顺利!
参考信息:
[1].Maruyama Y , Kato S , Azumi T . Exploring the performance of ROS2[C]// the 13th International Conference. 2016.(https://ieeexplore.ieee.org/document/7743223/citations?tabFilter=papers#citations)
[2].Universal_Robots_ROS2_Driver/ur_robot_driver/README.md(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/tree/main/ur_robot_driver)
[3].Universal_Robots_ROS2_Driver/ ur_controllers/README.md(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/tree/main/ur_controllers)
[4].Making a robot ROS2 Powered - a case study using the UR manipulator. ROS World 2021(https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver/blob/main/ur_robot_driver/doc/resources/2021-10_ROS_World_2021_Making_a_robot_ROS2_powered.pdf)
编辑精选
工控原创
- ▪ 与哈金森达成战略合作,乐聚机器人何以持续获得工业巨头青睐?
- ▪ 珍・赫夫纳当选国际机器人联合会新任主席
- ▪ 雷赛智能上半年净利预增超55% 定增募资11.44亿加码核心部件研发
- ▪ 上半年收官!2026年6月工业自动化月度资讯汇总
- ▪ 十年深耕国产测控,简仪科技发布AI时代新战略
- ▪ 5 月 RatingDog 中国通用制造业 PMI 为 51.8 通胀压力半年来首次缓解
- ▪ NVIDIA 和宇树科技宣布推出 H2 Plus 以推进人形机器人研究
- ▪ 2026 五月智造潮工业自动化月度盘点!
- ▪ 报告:物理AI发展提速,软件已成机器人创新最大瓶颈
- ▪ 乐聚智能创业板 IPO 获受理,拟募资 26 亿元


