|
西克应用
概述
在工业自动化领域,机器人引导(Robot Guidance)是实现柔性生产和智能制造的关键技术之一。SICK推出的Inspector(P) 2D智能相机,集成图像采集、算法处理与通信功能,可在无需外部工控机的情况下,独立完成目标识别与定位任务,广泛应用于机器人视觉引导场景。
Inspector(P)智能相机支持包括目标定位、特征提取等传统视觉方法,并逐步融合AI深度学习算法,实现对复杂工件的稳定识别。在机器人引导应用中,相机通过获取目标物体的二维位置信息(X、Y)及旋转角度(θ),并通过工业通信协议(如TCP/IP、PROFINET等)实时传输至机器人控制系统,从而引导机器人完成定位抓取、装配或分拣等操作。
本文介绍如何快速使用Inspector(P)系列智能相机实现机器人定位引导。

Inspector(P)系列智能相机
01
相机安装
包括固定位置安装(眼在手外)和安装到机器人上(眼在手上)两种方式。
本步骤旨在完成相机安装与对焦,以获取高质量的图像。确定工作距离后,需依次调整光圈与焦距,并设置适当的曝光时间、对比度等参数,从而获得对比度良好、图像清晰的画面。参数设定完成后,请勿再改动相机硬件部分。

眼在手外

眼在手上
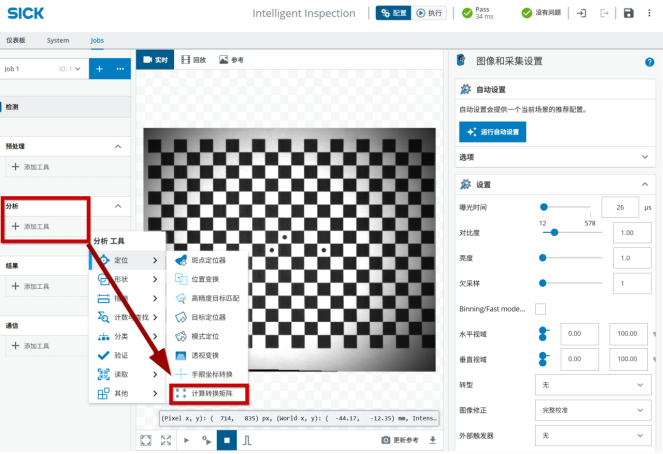
下图展示了相机参数设置界面。在Jobs页面中配置曝光时间、对比度、亮度等参数,并在图像修正选项中选择“未修正”。建议先运行自动设置功能;若图像质量仍不理想,再手动进行精细调整。
图片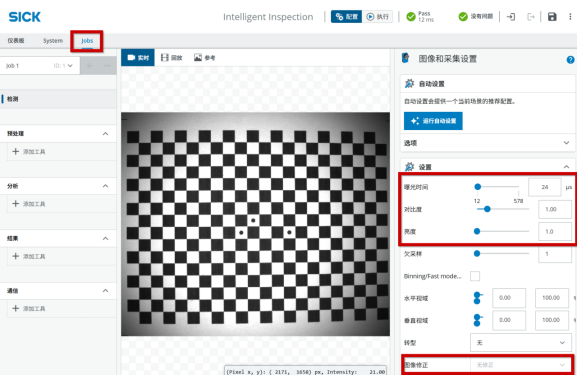
02
相机标定
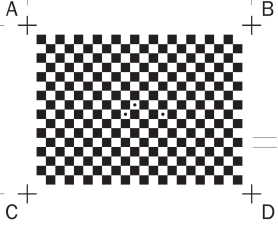
Inspector(P)支持简单与三点两种标定板类型,通常推荐使用三点标定板(如下图所示)。
请根据实际视野大小打印相应尺寸的标定板,确保标定板方格铺满整个目标视野区域,并保持标定板表面平整。标定时,标定板与相机之间的距离应设定为实际定位所需的工作距离。
若需将相机坐标系转换至机器人坐标系,建议选用带有ABCD坐标标记的标定板。其坐标顺序依次为:左上(A)、右上(B)、左下(C)、右下(D)。
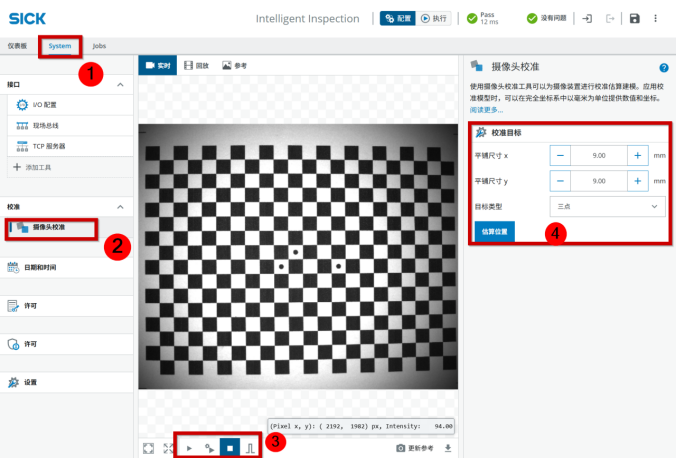
标定步骤如下:
• 切换至 System 页面。
• 选择 “摄像头校准” 功能。
• 采集标定板图像,随后点击 “暂停”。
• 输入标定板相关参数,将标定板类型选为 “三点”,点击 “估算位置”,即可完成相机标定。
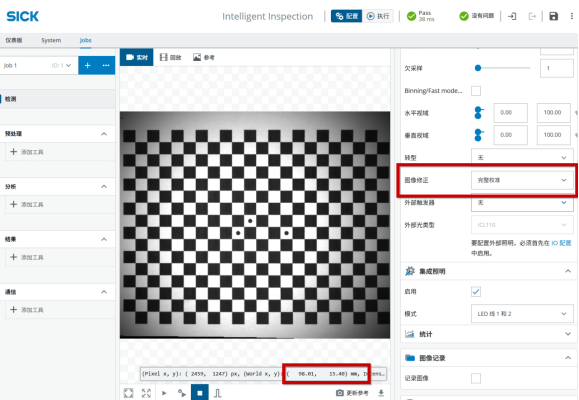
校准完成后,请在实时图像界面中选择“完整校准”选项。此后,实时显示的图像即为经过标定校正的画面。将鼠标移至图像任意位置,下方坐标显示将切换为以“mm”为单位的物理坐标数据。
03
手眼关联
坐标系分为两种,一是工件坐标系(标定板坐标系),二是机器人坐标系。
3.1工件坐标系
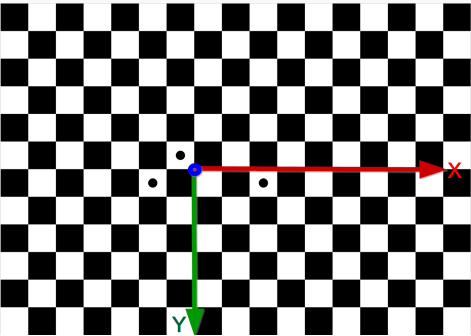
在相机标定过程中,系统已基于标定板位置建立了相机坐标系,即工件坐标系。下图中蓝色网格的交点位置为坐标系原点 (0, 0, 0),红色箭头指示的方向为 X 轴正方向,绿色箭头指示的方向为 Y 轴正方向。然后机器人根据此坐标创建坐标系,这样即完成了手眼关联。
3.2机器人坐标系
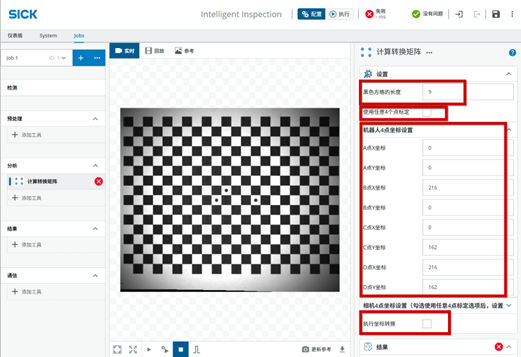
将相机坐标系转换至机器人坐标系,该过程需计算并应用转换矩阵。
若标定板自带ABCD四个标记点:
•相机将自动识别该四点在其坐标系中的位置;
•操作机器人使用TCP尖点依次对准同一点位,并分别录入它们在机器人坐标系下的坐标值;
•将获得的坐标填入对应输入框,并勾选“执行坐标转换”复选框,系统将自动计算转换矩阵。
若标定板无预设标记点:
•可在标定板上按左上、右上、左下、右下的顺序手动标注四个点;
•分别输入这四个点在相机坐标系与机器人坐标系中的对应坐标;
•勾选“使用任意4个点标定”选项,即可执行转换矩阵计算。
完成以上步骤后,应用过程中可以使用“手眼坐标转换”工具把对应的坐标转换到机器人坐标系中。
04
应用配置
4.1基本步骤
•完成相机安装和标定后,可以按照以下步骤进行应用。
•放置待抓取工件,调整成像参数以获取最佳图像质量。
•添加参考图像,该图像中工件的位置将作为基准抓取位置。
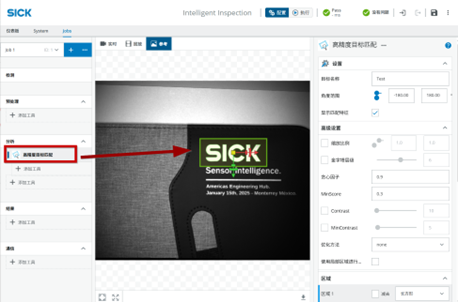
•添加“高精度目标匹配”工具,并依据操作指引完成参数配置。
•控制机器人移动至抓取位置,记录当前坐标数据,此位置即为机器人抓取的基准位置。
•输出坐标信息,包括XY平面偏移量及旋转角度,机器人将基于该偏移量执行抓取操作。
•如需使用机器人坐标系,请添加“手眼坐标转换”工具,利用转换矩阵将工件位置坐标转换至机器人坐标系。
4.2辅助工具
实际应用中,可在“高精度目标匹配”工具基础上配合使用其它工具,例如:
•参考点:可设定于工件的特定位置,比如抓取位置,是坐标系中的绝对位置。
•圆拟合:可精准定位圆形中心,作为定位位置。
以上工具位于高精度目标匹配工具的下一层级,可跟随匹配结果联动。
•AI物体检测:可以得到N个经过训练物体的重心位置用于定位抓取引导。
•斑点定位器:可以获得不规则物体重心位置。
4.3通讯配置
坐标输出支持TCP/IP、PROFINET、Ethernet/IP等通信协议,具体配置方法请参阅相关技术文档。
05
典型应用

传送带包裹定位

传送带纸箱定位

汽车冲压件定位

饮料包装行业定位
SICK
点击下方视频号,浏览更多视频

|

