|
摘要:
风电场的集群控制是保障电网的安全运行、实现风场总功率的优化以及提高风电场整体电能质量的有效手段。Beckhoff 的 EtherCAT 实时风场监控网络在风场网络通信的高速响应方面设立了新标准。基于 EtherCAT 的风场网络可以测量风电场并网点电流和电压的瞬时值,并且采样速率可达到 10KHz。如果风电场并网点出现电压跌落,系统能够在最短的时间内监测电压跌落数据,并且在 1ms 之内调整网络中的所有风力发电机组给定值。通过 EtherCAT 分布式时钟,所有测量值以及控制给定值的同步时间误差<1μs。另外,通过 EtherCAT 风场网络可以得到整个风场中所有风机的同步测量数据,具有同步特性的风场大数据的采集为整个风电场的能量控制、监控与预警和风机功率提升等提供更有力的支撑。
关键词:风电场控制;同步大数据采集;EtherCAT;
中图分类号:TM614;TP392;TP393.04
0 引言
随着近年来风力发电装机容量的不断提升,风力发电占所在电网的比例也随之持续增加。众所周知,风能具有高度的随机波动性与间歇性,所以大规模的风电接入会对电力供需平衡、电力系统的安全以及电能质量带来诸多严峻的挑战。2011 年初发生在甘肃酒泉等地的多起脱网事故也说明了制定风电并网规范的紧迫性。因此,国家电网提出了风电场接入电网的技术规定,由此产生了电网友好型风机和风电场的概念:①风机具有有功、无功调节和低电压穿越能力,确保电网发生波动时风机不解列;②集中优化配置有功功率和无功功率控制系统,实现风机的远程调节控制。基于以上求,不少整机制造商提出了智能风电场的概念,通过风电场网络能够远程集中监控风机和风电场的运行,并能实时的对功率进行控制,从而充分发挥风机自身的潜力为电网提供有力的支持。满足上述要求就需要高性能的风场级控制器、相应的电力测量设备和快速的现场总线。
1 风电场接入电力系统的现状
1.1 国家标准中关于风电场的要求
《GB/T 19963-2011 风电场接入电力系统技术》[1]中明确了风电场接入电力系统的测试内容:①风电场有功/无功控制能力测试。②风电场电能质量测试,包含闪变和谐波。③风电机组低电压穿越能力测试;风电场低电压穿越能力验证。④风电机组电压、频率适应性测试;风电场电压、频率适应性测试验证。
《GB/T 19963-2011 风电场接入电力系统技术》中要求最高的是风机的低电压穿越能力和风电场的低压电压穿越能力和动态无功支撑能力。这些的要求都需要风场级的控制系统的响应时间在 ms 级别。这是对整个风场级别的控制,而不是单个风机的控制。
a) 风机的低电压穿越能力(LVRT)
风电场并网点电压跌至 20%标称电压时,风电场内的风电机组应保证不脱网连续运行 625ms。风电场并网点电压在发生跌落后 2s 内能够恢复到标称电压的 90%时,风电场内的风电机组应保证不脱网连续运行。电力系统发生不同类型故障时,若风电场并网点考核电压全部在图 1 中电压轮廓线及以上的区域内,分店机组必须保证不脱网运行;否则,允许风电机组切出。

图 1 风电机组低电压穿越要求
b) 风场的动态无功支撑能力
总装机容量在百万千瓦级规模及以上的风电群,当电力系统发生三相短路故障引起电压跌落时,每个风电场在低电压穿越过程中应具有以下动态无功支撑能力:当风电场并网点电压处于标称电压的 20%~90%区间内时,风电场应能够通过注入无功电流支撑电压恢复,所需的无功电流取决于电压跌落的深度且必须取决于风力发电机组或电网并网点的要求;子并网点电压跌落出现的时刻起,动态无功电流控制的响应时间不大于75ms,持续时间应不小于 550ms。
1.2 现有风电场网络存在的问题
现有风电场网络存在的不足主要有两个:①控制周期慢;②无法协调整个风电场内的风机达到风场级别 LVRT 功能。
现有的风电场网络是基于以太网的解决方案,通讯采用以太网光纤,风机处使用普通以太网交换机,风场集控系统与各个风机之间采用 TCP/IP 等非实时的通讯协议。由于交换机的延时和以太网报文的不确定性,使得整个风电场控制网络是“秒级”或者更长的时间,通讯速度和通讯的实时性无法保证。
现有风机的 LVRT 检测和实现都是在风机本身的变流器部分实现,根据要求新增的风力发电机组都必须具备低电压穿越能力。然而,考虑到风场规模的增大,以及每台风机的不同情况,根据单个风机监测的电压情况作出的反应也许不能产生电网营运商预期的效果。由于风力发电机组与电网并网点之间存在的阻抗,所以它们之间的电压会有差异。也就是说各个风力发电机组对公共并网点电压的变化会做出不同的反应。同样,风力发电机组级馈入的无功电流与电网并网点的最终无功电流也是不一致的。即无法达到国家标准对整个风电场整体的低电压穿越的要求。
1.3 EtherCAT 风场控制网络解决方案
永磁直驱风力发电机和双馈异步风力发电机是目前使用最多的风力发电机类型,与传统的恒速恒频风力发电机相比,和功率因数可在+0.95 到-0.95 之间调整,可以在一定的范围内调整输出的有功和无功功率,其无功调节能力也广泛地应用于风电场的无功调整。充分发挥风力发电机自身的无功支撑能力,并以远端并网点母线电压为控制目标,
对维持电网的无功功率平衡和电压稳定有着十分重要的意义。来自德国弗劳恩霍夫风能及能源系统技术研究院的 Melanie Hau 和 Martin Shan [2]的研究表明,风场监控网络的速度以及风电机组自动控制系统现场总线的速度对风场电压或无功功率控制可实现的动态性产生了显著影响。
而这恰恰就是 EtherCAT 风场控制网络解决方案的优点。迄今为止,风场网络监控都是使用以太网实的。以太网光缆用于将单独的风力发电机组连接到主计算机。因为EtherCAT 基于以太网,所以其与以太网的物理层完全兼容。当使用 EtherCAT 时,也可应用相同的物理层。此外,EtherCAT 还完全现了线缆冗余。风场中的光缆环网通过风场主机的第二块网卡形成闭环。亮点就在于,与目前使用的支持冗余的交换机相比,使用 EtherCAT 可以显著提高传输速度并降低成本。
与目前的其它方案不同,EtherCAT 解决方案可以利用 EtherCAT 使整个风场应对低电压穿越(LVRT)。因此,如果在风电场并网点诊断出有电压跌落,它可以在 1 ms的时间内将信号传输给整个风场的所有风力发电机组。且其能够让整个风场对电网中的电压跌落做出协同的反应。这样,解决方案即可实现整个风场在电网并网点的确定的行为。
另外,EtherCAT 从站中的分布式时钟能够确保整个网络中的数据采样在时间上保持同步。时基误差小于 1μs(微秒),甚至小于 100 纳秒。有了这些数据,电流、电压和频率可以得到相应控制且电网可以得到最优的支持。
2 倍福极速风电场监控网络
倍福极速风电场监控网络方案如下图 2 所示。
该方案是基于倍福的工业 PC、电力测量端子模块、带光纤接口的 EtherCAT 耦合器和实时的 EtherCAT 通讯技术、超采样技术、EtherCAT 分布式时钟技术。倍福工业 PC上运行专用的风电场能量管理平台,具有强大的风电场实时电力监控功能。该平台提供与电网调度接口,集中实时控制风电场并网点的电压、功率等等。保证风电场与接入地区电网相互协调运行,实现高效的风电场运行和管理。EtheCAT 光电转换耦合器模块把风电场管理平台与风电场内的风机连接到一起,组成风电场实时电力监控网络,可在风电场网络中实现小于 1 ms 的实时控制任务。专用的电力监测端子模块监控风场电网并网点和单台风机并网侧的电网状况(电压、频率、有功、无功等等)。
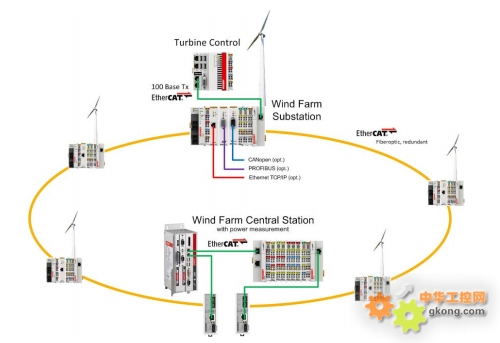
图 2 风电场实时电力监控网络
2.1 风电场实时电力监控网络方案分为两部分:
a) 单台风力发电机组接入 EtherCAT 风场网络,如下图 3 所示
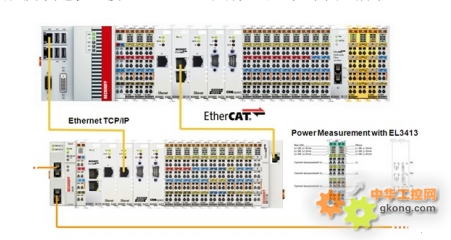
图 3 单台风力发电机组接入 EtherCAT 风场网络
该方案采用了倍福嵌入式工业 PC CX5020 控制器作为风机的主控制器,主控制程序基于 TwinCAT 软件,运用倍福自主开发完善、高效、成熟的风电专用功能库,集成先进的控制算法,很好的协调控制风机各部件和子系统的运行。
根据当前的风况和风电场能量管理平台的控制指令,控制风机的输出电压、频率和功率等等,保证风机的稳定运行。风机控制器可以通过 EtherCAT 网桥模块 EL6695 和扩展模块 EK1110 接入风电场实时控制网络,与能量管理平台进行通讯,满足对整个风电场的实时控制的需要。EK1501 作为单台风机与风电场 EtherCAT 实时网络的接入点。
EL3413 模块可直接监测单台风机并网侧的 690 V AC 电压、电流、频率、有功、无功、发电量,以及 21 次以内的谐波等等。风机主控系统通过采集的电力数据监测风机运行状况、相关的数据可通过风场网络传送到风电场中控室的能量管理平台和SCADA 系统。
b) 风电场控制器及公共并网点电力监测,如下图 4 所示
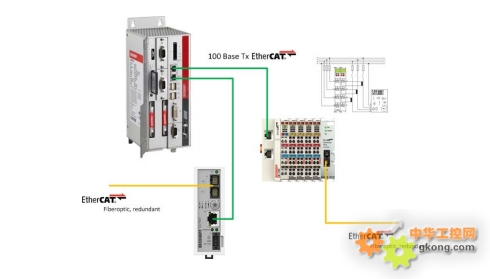
图 4 风电场并网点电力监测
国标中所有要求的参考点只有一个:风电场公共并网点,所以对风电场并网点的电压值、电流值的监测极其重要。并网点电量值的快速采集,需要高精度、高采样率的测量设备,最好能高速的得到并网点电压和电流的瞬时值。
具有 XFC 超采样技术的电力测量模块 EL3773 对风电场并网点进行监控。倍福工业PC上运行的能量管理平台通过EtherCAT光纤耦合器或光电转换模块接入到风电场实时网络,采集风电场并网点处和每台风机并网侧的电网状况,通过能量管理平台软件统一调控整个风电场的电压、频率、有功出力和无功等。
2.2 通讯架构:
①风场实时网络为环网方式,使用光纤(单模光纤最远 20km,多模光纤最远 2km)通过 EtherCAT 总线和相应的耦合器 EK1501 把风场的风机连接成通讯环网。风场中的每台风机的主控制器 CX5020 可通过 EtherCAT 网桥模块 EL6695 实现与能量管理平台的实时通讯。
②EtherCAT 采用开放的实时以太网通讯协议,是一种高速以太网现场总线,由德国倍福自动化有限公司研发。EtherCAT 为系统的实时性能和拓扑的灵活性树立了新的标准,分布于 100 个节点的 1000 个开关量刷新时间仅为 30µs,同时,它还明显降低了现场总线成本。EtherCAT 的特点还包括分布式时钟,可选线缆冗余和功能性安全协议(SIL3)。采用 XFC(极速控制)技术后,利用时间戳可获得小于 100 ns 的时间分辨率。
2.3 开放性与兼容性
EtherCA 系统具有很强的开放性,该解决方案也可与第三方供应商的控制器一起使用。倍福可提供与常见的场总线系统(例如 PROFIBUS、PROFINET 和 CANopen 等)桥接的 EtherCAT 模块,包括主站和从站与,EtherCAT 网络可以使用这些总线与第三方控制器通讯。
3 技术亮点的详细介绍
3.1 EtherCAT 网络
作为快速、实时的总线系统,EtherCAT 使得倍福的风电场实时电力监控网络解决方案变得更加完美。EtherCAT 于 2014 年成为了中国的国家推荐标准《GB/T 31230-2014 工业以太网现场总线EtherCAT》[3],它不仅成为了控制现场总线,还成为了测量现场总线。只有这种基于以太网且具有高度确定性的高速现场总线协议才能实现诸如状态监测集成的复杂应用。有了全双工快速以太网和几微秒的总线周期,EtherCAT 功能原则的有用数据传输率远远超过 90%。连同后面提到的超采样功能和 EtherCAT 从站中的直接数值缓冲,采样率可远远超过实际的总线周期。
3.2 超高速的功率测量模块,可达 10,000 采样点/秒
通过 EtherCAT 还实现了其它新技术:例如,数字量输入模块 EL1262 能够以高达1 百万采样点/秒的速度扫描信号。例如,超采样功能使得频率高达 100 kHz 的信号测量或输出成为可能。例如,借助于 EtherCAT 功率测量端子模块 EL3773,超采样技术可用于测量电网并网点的电流和电压。采样频率可达 10 KHz。
电网监控端子模块 EL3773 设计用于监控三相交流电压系统的状态。在 EtherCAT超采样原理的基础上,能够以时间分辨率最高达 100 μs 的速度同时测量三相电压和电流共计六个通道,然后把采集到的电压、电流的真实传输至控制器。EL3773 支持分布式时钟系统,因此,能够与其它 EtherCAT 设备一起同步进行测量。
3.3 EtherCAT 分布式时钟,确保采集信号的同步性
EtherCAT 设备的分布式时钟功能的分辨率为 1 ns 且精确度为 10 ns,使得测量值和控制值的同步时间窗口能小于 1 μs,甚至小于 100 纳秒。EtherCAT 拓扑中的所有分布式时钟在进行时钟同步时已计算了传输延迟的影响。基于这项功能,可以确保整个风电场网络中的数据采样在时间上保持同步。使用这项技术甚至还可以实现风场内的各风机变流器的 IGBT 同步。鉴于此,风力发电机组制造商和变流器供应商都已经参与进来了。
3.4 同步大数据的采集
随着风电领域研究的深入,风电场网络还被赋予了大数据采集的期待。风场级大数据,可用于分析风机尾流影响;优化风电场扇区控制,优化风电场分布式能量管理控制;优化风机参数,提高风机功率;达到风电场全生命周期管理的目的。所有的数据,都是“各个风机的同步数据”,否则得到的数据对于数据分析的意义将会大大的降低。在使用GPS 对时功能之后,现有的风电场网络中的各个风机的时钟同步也是在“几百毫秒”级别的,其他的测量值,例如风速、风向等数据的同步性,更加无法保证。EtherCAT 设备的分布式时钟功能可以确保整个风电场网络中的数据采样在时间上保持同步。
EtherCAT 明显增加了系统速度:一个包含 1,500 字节的 EtherCAT 报文可由主机在77μs 的时间内完成发送和再次接收。假设每台风力发电机组的过程映象区为 50 输入字节和 50 输出字节,那么具有 150 台风力发电机组的风场的过程映象区可以在小于 1ms的时间内刷新。如果速度要求更快或风力发电机组数量明显增加,那么可在一台主机上实现多个 EtherCAT 环网。
4 结束语
风场网络控制的重要性越来越突出,海上风电场尤其重视这个环节。德国对海上风电场的要求严格,在海上风电场设计初期,就必须建立风电场的仿真模型,对风电场的控制网络有严格的规定。全套系统采用倍福控制技术的 5MW 风机已经于 2009 年在德国的第一个海上风场“Alpha Ventus”进行了测试和试验。
倍福 PC 控制技术理念为集成大量的高于标准控制之外的高级功能预留了足够的空间。高性能 CPU、高速 I/O 端子模块、EtherCAT 通信和 TwinCAT 自动化软件为实现风电场极速控制提供了坚实的技术基础。倍福基于 EtherCAT 的风电场实时电力监控网络解决方案实现了小于 1ms 的反应时间,增加了电网兼容性。EtherCAT 拓扑中的所有分布式时钟可通过传输延迟的测量进行同步,使用这项技术甚至还可以实现风场内的各风机变流器的 IGBT 同步。风电场中风电机组大量的同步数据的采集并存入数据库,为整个风电场的能量控制、监控与预警和风机功率提升等的研究提供了大数据的准备。
[1] 《GB/T 19963-2011 风电场接入电力系统技术规定》
[2] Hau, Melanie and Shan, Martin. Windparkregelung zur Netzintegration. 16th
Kassel Symposium Energy Systems Technology, 2011.
[3] 《GB/T 31230-2014 工业以太网现场总线 EtherCAT》
[4] 《NB/T 31003-2011 大型风电场并网设计技术规范》
|

