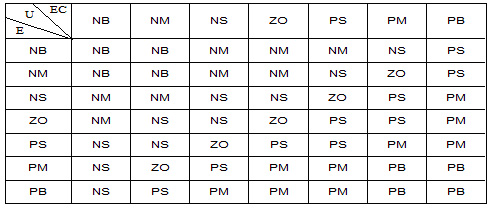
表一 光电跟踪伺服系统的模糊控制规则表 Table.1 Fuzzy control rule table of opto-electronic tracking servo system 三、带有二维模糊控制器的光电跟踪伺服系统仿真模型简介:
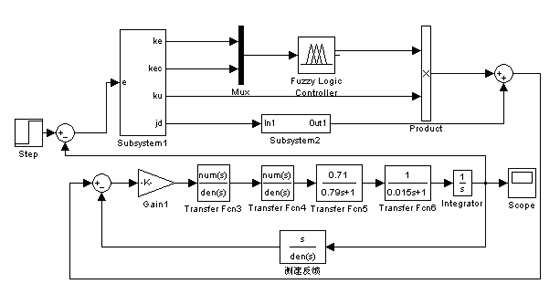
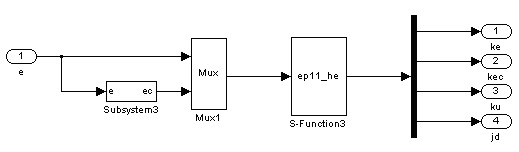
如图一所示,光电跟踪伺服系统是双环随动系统,他由速度环和位置环构成,在位置环上,模糊控制器和常规经典控制器被设计成按系统偏差大小进行分段控制。 图一 带有自调整因子二维模糊控制器的光电跟踪伺服系统SIMULINK仿真模型 Fig.1 simulation model of SIMULINK of opto-electronic tracking servo system with self-tuning two-dimension fuzzy controller 图二 Subsystem1的SIMIULINK仿真模型 Fig.2 simulation model of SIMULINK of Subsystem1
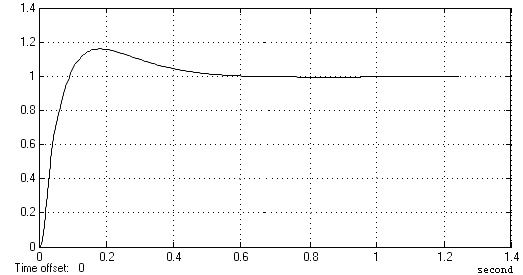
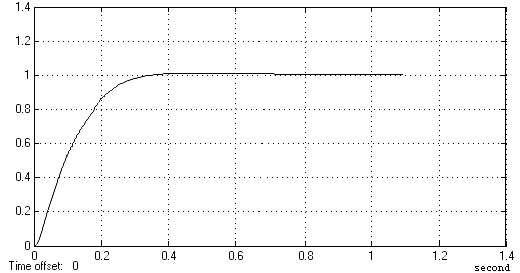
经过仿真,得到常规控制器阶跃响应曲线(图三)和带有二维模糊控制控制器的光电跟踪伺服系统(图四、图五)的阶跃响应曲线如下: 图三 光电跟踪伺服系统经典控制器的阶跃响应曲线 Fig.3 step response of classic control of opto-electronic tracking servo system 图四 带有二维模糊控制器的光电跟踪伺服系统阶跃响应曲线 Fig.4 step response of opto-electronic tracking servo system with two-dimension fuzzy control 图五 带有自调整因子二维模糊控制器光电跟踪伺服系统的阶跃响应曲线 Fig.5 step response of opto-electronic tracking servo system with self-tuning two-dimension fuzzy control