|
随着自动化投资回报的增加以及工厂所有者的总拥有成本的降低,与人类一起工作的工业机器人正在不断增加。这些机器人正在自动执行以前只有人类才能完成的任务,这种现象不仅发生在大规模制造中,而且也发生在中小型企业中,业界把这种趋势视为自动化的“民主化”。工业机器人的发展离不开半导体技术的进步,在工业自动化领域的主要半导体方案提供商中,ADI公司一直在提高工业机器人的能力上发挥着积极作用,在运动控制、功能安全、高级检测和系统级设计等领域,专家团队正在不断创造适用于工厂车间及更多领域的机器人和协作式机器人的新技术,本文将从该公司在机器人领域的技术布局,看看在工业机器人日益普及的当下如何提高生产制造的精度。

传统机器人和新兴机器人在构架上的PK
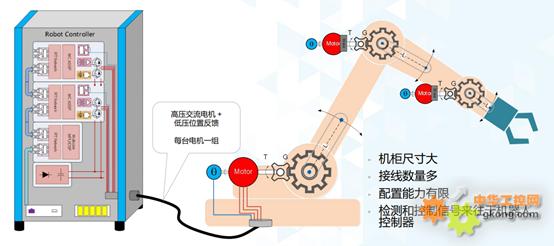
机器人的核心部分是用于运动控制的伺服驱动器,每个轴的运动必须与其他所有轴在时间上同步和一致,以便机器臂可以在一定的时间和空间里走过预定义的路径。每个电机都有一个伺服器,多轴伺服器可以控制一个以上的电机,但是无论哪种方式,每个伺服器必须以适当的方式连接在一起,并满足特定机器人设计的规范。传统上需要一个大型外部控制柜,其中包含所有伺服关节和电力电子设备。使用长线缆连接到机器人本身,机器人的每个轴上都装有电机,线缆既有每个电机的高压交流信号,也有来自每个轴上的每个状态传感器或编码器的低压状态反馈信号。这种架构的缺点是机柜尺寸必须与它所控制的机器人的尺寸完全匹配,而且很难添加新元件,例如新的轴、线性环或作为机器人移动的桌子。添加新传感器也很困难,即使可以添加,也必须将额外的电缆连回到控制柜。这就大大降低了机器人的可扩展性和灵活性。对于像这样的传统架构,高效改变系统要困难得多。
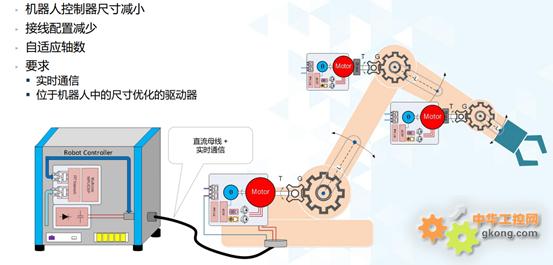
随着制造业格局的变化,灵活性对于制造商改变生产线或批次规模至关重要。为了响应新的或不断变化的消费者需求,机器人架构需要更加注重与伺服驱动器的集成,每个轴上都有电动机,这与市场上机器人的体积更小、重量更轻的趋势紧密相关。近年来,机器人控制柜的尺寸越来越小,一些控制柜减小到盒子般大小,机柜和通信网络的直流电源线缆也发生了变化。 这种架构支持增加轴和传感器,并将所有东西都连接到机器人的通信网络和直流电源,所有电力电子设备和控件都在每个轴的每个集成驱动器内部。这种架构带来了极大的灵活性,允许通过软件改变系统,但这给内部机器人网络及其功能带来了新的挑战。
一个新兴机器人中通常至少有三个网络甚至更多。外部网络将机器人控制器连接到POC。 这基本上是工厂网络,除非机器人是独立的,一般会插入到更高级别的网络中。该连接通常必须是多协议的,因为机器人制造商不知道机器人连接的是哪种系统。例如,可能是Profinet系统、EtherCAT系统或其他系统。因此,它基本上需要是多协议的。机器人内部通常会有两个网络:第一个是伺服控制网络,它将机器人控制器连接到每个伺服驱动器,并将更新的位置命令传送到每个伺服器;另一个是位置检测网络,该位置信息或结果传送回相关的伺服驱动器。所以多协议实时确定性以太网通信对于工厂环境中的多轴机器人至关重要,ADI的Chronous工业以太网产品组合提供了一系列解决方案,包括平台、交换芯片和物理层套件,支持所有主要的工业以太网协议,并提供多协议灵活性、易用性和支持。这些面向未来的产品适用于当今的工业以太网和未来基于融合网络的时间敏感网络(TSN)。
实时以太网多协议交换下的多轴同步网络
机器人网络的需求主要是管理该网络中的流量。因此,机器人网络中的流量通常是在一条线上建立的,流量流入伺服驱动器的网络端口,进入PHY流入下图所示的以太网,再流入网络进程,或者可以根据特定数据包的目的地将其路由到下一个节点。因此,该环路中的延迟和流量管理对于确保系统实时运行至关重要。
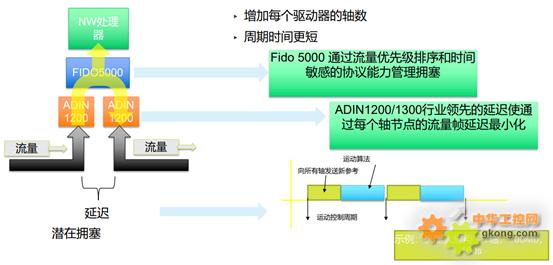
实时以太网多协议交换机通过流量优先级排序和时间敏感协议来管理拥塞,确保通过系统的流量得到适当管理,无论是视频流还是用于其他传感器(例如抓取器系统)的流量,与运动控制流量相比,这些流量的优先级可能不高。
在所有轴都需要同步的多轴网络中,延迟性能至关重要。机器人设计人员的控制周期通常低至50到25微秒,在此周期内,每个新的位置参考和其他相关信息必须从机器控制器传输到每个节点或轴。这些节点中的每个节点还必须更新伺服控制算法并同时驱动所有相关器件。PHY低延迟会直接影响整体时序预算,而且这些延迟会累积。
此外,根据机器人的架构和控制方案的拓扑结构,某些控制算法实际上可以驻留在PLC中,这会增加复杂性和时间独立性。因此,机器人等高性能多轴同步运动应用要求控制时序是确定性的,以最小化端到端延迟时间,尤其是随着控制周期时间的缩短和控制算法复杂性的提高,低延迟PHY和嵌入式以太网交换机是优化这些系统的重要元素。
如何解决上述全部挑战,使PHY具有行业领先的鲁棒性和延迟性能呢?ADI针对机器人运动系统的PHY收发器ADIN 1300和ADIN 1200,是专为ADI最新扩展的工业以太网解决方案Chronous™而开发的最新技术,提供低功耗、低延迟和稳健性,可以在恶劣环境中可靠地运行,具有如下增强的PHY特性:
- 增强的链接断开检测,可在10 µs内检测到链接断开——实时工业以太网协议要求(如EtherCAT®)
- 数据包起始检测支持IEEE 1588时间戳——整个网络要求实现精确的时序
- MDI引脚提供增强ESD保护——RJ-45接头具有ESD稳健性
- PHY启动时间:< 15 ms——从电源状态良好到管理接口/寄存器可用的时间
- 片内电源监视器——提高了上电时的系统稳定性
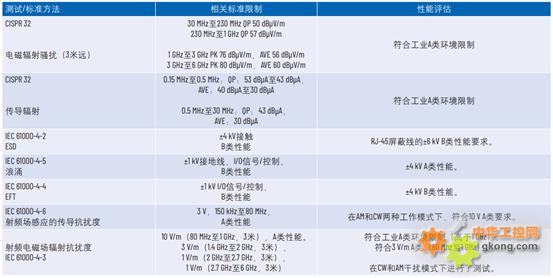
ADIN1300是业界具有出色的功耗、延迟和封装尺寸特性的10Mbps/100 Mbps/1000 Mbps工业以太网PHY,其EMC和ESD稳健性已经过广泛测试,可在高达105°C的环境温度下运行。ADIN1300 PHY已通过EMC/ESD标准测试,如下表所示。通过使用已通过IEC和EN标准广泛测试的以太网PHY技术,可显著降低产品合规性测试和认证的相关成本和时间。ADIN1300 PHY满足EtherCAT G工业以太网协议的所有要求,并包含在EtherCAT G PHY选型指南中。
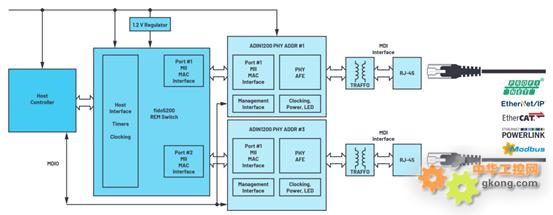
ADIN1200低功耗10 Mbps/100 Mbps稳健型工业以太网PHY已经过广泛的EMC和ESD稳健性测试,可在高达105°C的环境温度下运行。带fido5200的ADIN1200为多协议、实时工业以太网设备连接提供系统 级解决方案,支持Profinet®, EtherNet/IP™、EtherCAT、Modbus TCP和Powerlink实现嵌入式双端口设备连接,如下图所示。ADIN1200 PHY满足EtherCAT工业以太网协议的所有要求,并包含在 EtherCAT PHY选型指南中。
=
总结
根据工信部近期发布的《2020年1-12月机器人行业运行情况》显示,1-12月累计生产工业机器人23.7万套,同比增长19.1%,创下我国工业机器人单年产量最高纪录,中国制造向中国“智造”升级中,机器人正在扮演着越来越重要的角色。在机器人应用中,多轴同步至关重要,所以网络需求极为苛刻,针对工业应用而设计的增强物理层技术就其中是一个关键的设计选择。稳健型工业以太网PHY技术可解决功耗、延迟、解决方案尺寸、苛刻环境温度、稳健性(EMC/ESD)和产品寿命等问题。
|

