|
人们一说起伺服电机,首先想到的参数调整、位置模式、速度模式、反馈等等,感觉很迷茫,想要让电机转起来,还要注意各种问题,对于一个刚接触伺服的人来讲,非常不友好。
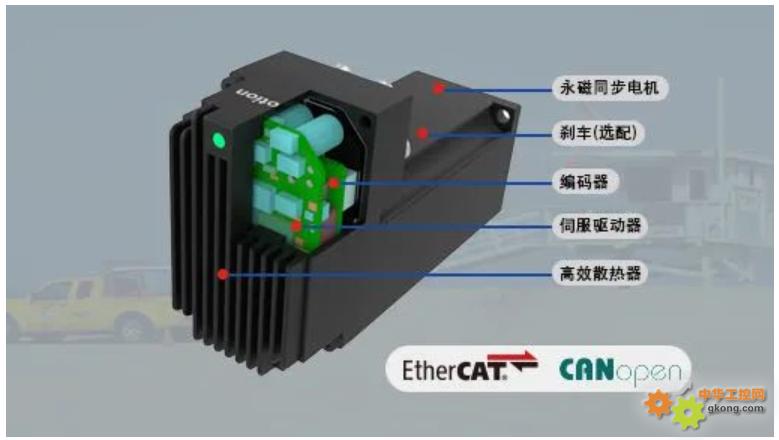
而一体化伺服电机高度集成化,集电机、编码器、控制器于一体,完全替代传统的分离式电机,支持CANopen/EtherCAT总线协议,给客户多种选择,同时为了满足传统伺服使用者的需求,还特别开发了模拟量控制、占空比调速、外接脉冲输入控制等。可预设参数,结合上位机教程,即使初学者也可轻松掌控。
我们有兼容性超强的多段控制模式,配合DI使用,那这个用起来是不是很复杂?会不会配置很多的参数?很明确的告诉你,不需要,今天我们就来看下这个神奇的功能到底怎么用!
什么是多段位置/多段速度
多段功能主要分为多段位置功能和多段速度功能,每一种功能都有三种使用方式:单次运行,循环运行,以及DI切换运行。我司伺服电机多段控制功能为客户准备16段控制,每段控制可以灵活配置速度、位移、加减速时间,运行时间以及等待时间。

下面我们以多段位置进行讲解:
单次运行:客户可以根据自己的使用需求,配置好多段位置运行所需的参数,给电机使能信号,电机从用户配置的第一段位置开始运行,一直运行到用户配置的最后一段停止,整个流程结束。
循环运行:单次运行的升级版,循环也是以单次运行为周期,通过设置循环次数,来实现多次运行,但是这种模式配置略显死板,因为只能从第一段依次运行到最后一段,无法随心所欲的控制其中的任意几段。
DI切换运行:自然是为了弥补先前的短板,通过4个DI,进行二进制编码,从0-15,随意切换,不在依据传统的顺序,相对自由很多,这也解决了客户的很多问题.
【小贴士】:此种多段位置模式,仅是在客户不希望编写繁杂的程序,但是又想实现多段控制的情况下使用,更加复杂的功能还是需要通过我们的总线协议来实现。
功能演练
说的再好,也不如一试,前几天刚有客户给我出了个难题,恰好是用多段位置来实现的,接下来我们说下如何实现简单的多段位置控制。
客户的需求:客户使用PLC控制电机启停,只提供一个输出信号给我司电机作为输入信号,其他都是外接开关(不接入PLC),外部没有脉冲给定,电机运动方向无需切换,固定死一个方向即可,电机需要实现转动固定的脉冲和一直沿着一个方向运行这两种模式,简单概括就是速度模式和位置模式切换。
前面还算正常,只给一个输出信号也可以,不给脉冲,我们电机自己可以发脉冲,不切换方向也能实现,但是这个切换模式确实让人难搞,从我司电机整体出发,每个控制模式都是独立的,在不通过发送指令的前提下,实现位置控制和速度控制切换,只有一些客户定制品,才会特意修改程序来满足。正常情况,在现有条件下是难以实现的!
但是从客户需求出发,仔细对照我们的功能,发现仅多段位置便可以匹配需求。具体实现如下,客户说的一直转并不是没有限制的,电机也不是持续性运转,距离有限,所以给定一个足够大的位置,即可替代短时间运行的速度模式,设置如下:
第一步:设置为Nimotion位置模式(多段位置是我司Nimotion模式下得一个分支)

第二步:设置位置指令来源(位置的给定多种多样,我们这里选择多段位置)

第三步:设置多段位置运行方式(选择灵活的DI切换运行)

第四步:位置指令类型选择(默认相对位置)和运行起始段选择(默认是1)

第五步:各段运行参数设置(总共设置两个段,一个段用于进行位置模式,一个段用于类速度模式,也就是给一个很大的位置)

第六步:客户要求使用一个开关进行切换,那么想要实现两段切换至少需要2个DI才可以实现,所以需要配置虚拟端子一直给0的状态,这样DI切换只需要切换一个就可以实现速度模式和位置模式的切换了。具体如下:

简单的讲,就是用了两个开关,其中一个一直是OFF的状态,所以切换到位置模式是将DI2变为OFF,也就是第0段.切换到速度模式就是将DI2变为1,即是第3段。
这样就简单的实现了客户的需求,虽然只是一个很简单的应用,但是也可以看出此功能的兼容性很强。上述只是我司电机功能很小的一部分,想了解更多,请关注我们!
|

