|
- 高 新岗,
挑战:
在我们生活的美丽地球上,到处都存在着磁场,虽说存在但我们又看不到,摸不 着给人以神秘感。在现代通信领域中,磁场的应用最为广泛,可以运用其传输信号,也可 以用它来感知视眼之外的东西,进而丰富了我们的生活。本研究中,运用磁传感器来感测 微弱的磁场信号,对检测到的信号进行处理,进而判断磁源的方向和位置。
解决方案:
通过实验测试,系统运行稳定,测量精度比较高。目标磁源位置定位比较准确,定位 误差小于5cm,夹角误差小于1 度,磁矩大小误差小于0.5Am2。并且对织物、人体等费金 属介质不敏感。测试环境要求空旷无大的金属体。
一. 引言
在现代科学技术和人类生活中,处处可遇到磁场,发电机、电动机、变压器、电报、电话、收音机以至加速器、热核聚变装置、电磁测量仪表等无不与磁现象有关。甚至在人体内,伴随着生命活动,一些组织和器官内也会产生微弱的磁场。
磁场是一种看不见,而又摸不着的特殊物质,它具有波粒的辐射特性。磁体周围存在磁场,磁体间的相互作用就是以磁场作为媒介的。电流、运动电荷、磁体或变化电场周围空间存在的一种特殊形态的物质。由于磁体的磁性来源于电流,电流是电荷的运动,因而概括地说,磁场是由运动电荷或电场的变化而产生的。
恒磁场又称为静磁场,而交变磁场、脉动磁场和脉冲磁场属于动磁场。磁场空间各处的磁场强度相等或大致相等的称为均匀磁场,否则就称为非均匀磁场。离开磁极表面越远,磁场越弱,磁场强度呈梯度变化。
地磁场是从地心至磁层顶的空间范围内的磁场。地磁场包括基本磁场和变化磁场两个部分,它们在成因上完全不同。基本磁场是地磁场的主要部分,起源于地球内部,比较稳定,变化非常缓慢。变化磁场包括地磁场的各种短期变化,主要起源于地球外部,并且很微弱。
地球的基本磁场可分为偶极子磁场、非偶极子磁场和地磁异常几个组成部分。偶极子磁场是地磁场的基本成分,其强度约占地磁场总强度的90%,产生于地球液态外核内的电磁流体力学过程,即自激发电机效应在人类科技发展的长河中,人们不仅认识静磁场的特性,而且不断的认知动磁场特性,并利用它来研发新的设备,并不断扩展其应用领域,比如:生物医学、电子通信等领域。
二. 背景
基于永磁体或交变磁源空间磁场检测的磁定位方法是利用磁体产生的磁场有特定的分布规律这一特点,通过检测目标永磁体或交变磁源的空间磁场来逆求出目标磁体的位置、大小及姿态信息。
在生物医学领域中,无创介入式微型诊疗装置可以被应用于人体消化道图像采集与传输、靶向释药、体液采集、消化道生理参数提取等方面,对于微型诊疗装置在体内的实时定位于跟踪在实际应用中有重要意义。采用基于永磁体或交变磁源空间磁场检测的磁定位方法来实时跟踪微型诊疗装置或其他交变磁源的位置及磁源大小。与其他定位方法相比,该方法有着定位精度高、制作和运行成本低、便携性好,对人体无毒副作用,并能实现实时定位于连续跟踪等优点。本磁定位方法,因采用的磁传感器不同,可以拓展到其他的磁源检测及定位。系统整体监测的指标参数有:磁源的磁矩大小、位置坐标及空间夹角大小。
三. 磁偶极子模型
当源点到场点的距离远大于磁源的尺寸时, 可将磁源近似为磁偶极子, 进而用磁偶极子模型来计算场点处的磁感应强度。设磁源的坐标为(x0 , y0, z0), 磁偶极矩为m(mx, my, mz ), 场点p 的
坐标为(x, y, z), 源点到场点的矢径为r, m 与z 轴正方向的夹角为θ,m 在xoy 平面上的投影与x 轴正方向的夹角为φ, 如图3-1 所示。设磁偶极矩的大小为m, 则有: mx =msinθcosφ, my=msinθsinφ,mz = mcosθ。根据磁偶极子模型, 场点p 处的磁感应强度B 的矢量表达式为:

(公式3-1)
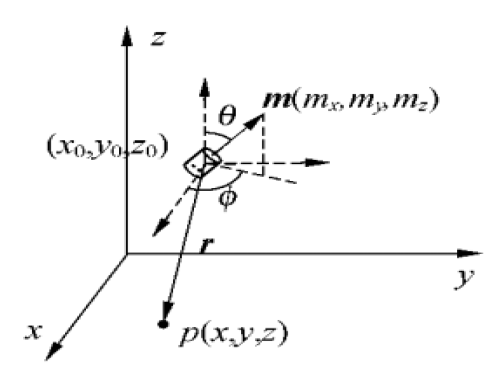
图3-1 磁源位置和方向
注:当场点与源点的距离大于8 倍磁源尺寸时, 磁偶极子模型成立。
四. 总体设计
4.1、磁偶极子模型分析方法
使用磁传感器来检测磁源磁场空间分布的方法中,都是将目标的远场等效为磁偶极子,磁偶极子模型分析中有两种方法:一种是矢量模型分析,另一种是标量模型分析。
在矢量模型分析中,必须测量目标的三分量磁场数据,此时采用低噪声、高灵敏度的磁传感器进行磁场三分量数据采集。若磁传感器性能不好,由于干扰磁场噪声的影响,导致目标磁场的数据淹没在噪声中,很难进行目标定位和大小判断。因此,需要磁传感器噪声很低。
在标量模型分析中,可以利用高精度光泵磁强计测量磁场数据,经过软件补偿后精度可以达到1nT 以下。该分析中,通过高通滤波器得到目标磁偶极子的磁场信号,再代入磁偶极子矢量磁场计算公式,经化简,得到3 个非线性方程,偶极子标量信号可以由这3 个非线性函数的线性叠加来表示。经过信号子空间检测和参数估计方法,可以得到目标磁源的位置及坐标。
本研究中,采用矢量模型进行目标磁源的定位。
4.2、系统组成
根据系统定位要求,本系统包含以下子模块:
1)、磁传感器模块,功能:实现信号的变换、检测及放大。
2)、数据采集与传输模块,功能:将检测到的信号转换为数字信号,并完成远程传输。
3)、数据处理与现实模块,功能:将检测的数字信号进行算法处理,计算出目标磁源的大小和位置信息,并显示计算结果值。
其结果示意图如图4-1 所示:
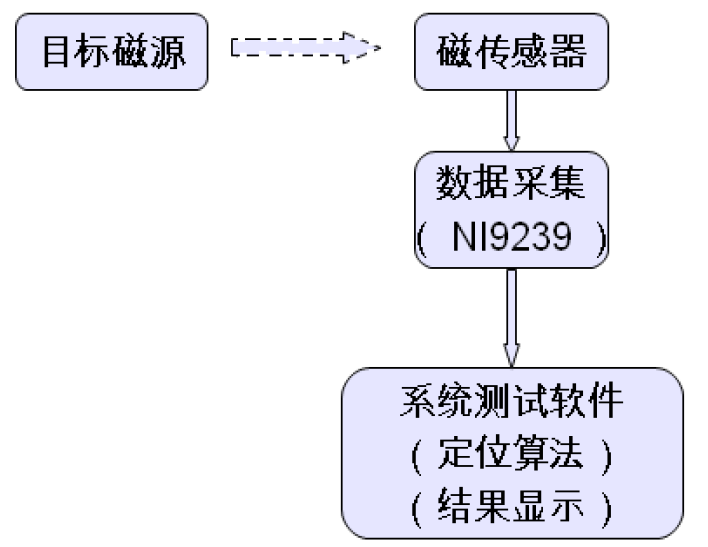
图 4-1 系统组成框图
在图4-1 中,磁传感器模块采用高灵敏度、低噪声的三轴磁传感器,体积小巧,可以实现磁场信号的三分量检测。数据采集模块采用NI 的高分辨率高采样率的采集卡9239,完成对磁场电压信号到数字信号的转换,并经过USB 传输线,将采集到的数据上传到系统测试软件,经软件处理后,计算出目标磁源的位置和大小。
4.3 目标磁源定位算法
根据磁偶极子模式,通过矢量磁场强度计算公式得到目标磁场信号的3 分量方程组,如公式4-1、4-2、4-3 所示:
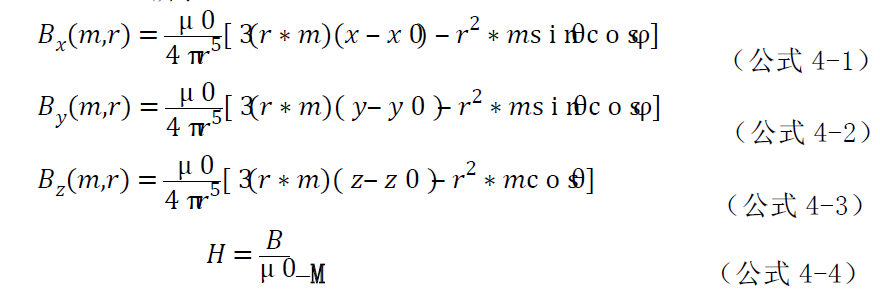
通过公式4-1、4-2、4-3 计算出目标磁源的3 分量磁感应强度,再通过公式4-4 可以算出磁场3 分量的磁场强度。
在以上公式中,我们使用了假设磁源的位置数据和姿态数据,而磁定位的最终目的是计算出目标磁源的位置数据和姿态数据。这两者看似矛盾,其实并不矛盾。通过假设的位置和姿态数据与实际计算出的数据比较求差值,使得差值最小最优,当达到这个最小最优的条件时,我们可以认为假设值可以表示目标磁源的实际位置和大小。这样就可以把求解目标磁源数据问题转换为求解方程组最小最优化问题,实现实际问题与数学问题的转变。
对于求解非线性方程组的最小最优化问题,解决的方法很多,如共轭梯度法、牛顿迭代法、单纯形法、模拟退火法、遗传算法、神经网络法等。这些算法各有各的优缺点,综合世界运算速度、定位精度和编程难易程度,最后选用牛顿迭代算法。
4.4、数据保存
系统软件将每次监测计算出的磁源位置、大小数据保存为文本形式,同时添加保存当前系统的时间。待监测任务完成后,点击图形绘制按钮,软件通过MathScript 节点调用MATLAB 程序,将保存的位置、大小数据与对应的时间绘制成一个三维立体图形,并直观的表现出目标磁源的位置和大小。
五. 软件实现和实验结果
目标磁定位系统测试软件是由Labview2012 评估版软件编写实现,软件主要包括数据采集、数据读取、定位计算、结果显示、信号波形显示、数据保存等功能模块。数据采集过程中,通过物理通道读取NI9239 采集的磁场3 分量数据,并将数据传给定位算法模块,由其计算出目标磁源的位置、大小和姿态参数,并在系统软件上显示计算结果。定位系统在小于2s 的时间内完成1 组数据的处理,计算并显示出目标磁源的位置及大小。根据目标移动的位置和时间关系,系统软件就可以绘制出目标移动轨迹。从而,基本实现目标的实时跟踪和定位。
系统软件显示界面如图5-1 所示:
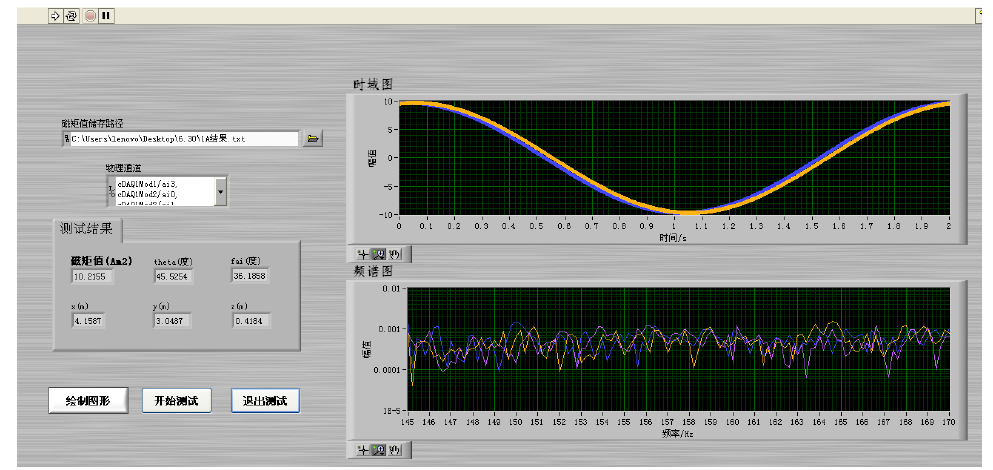
图 5-1 系统软件界面
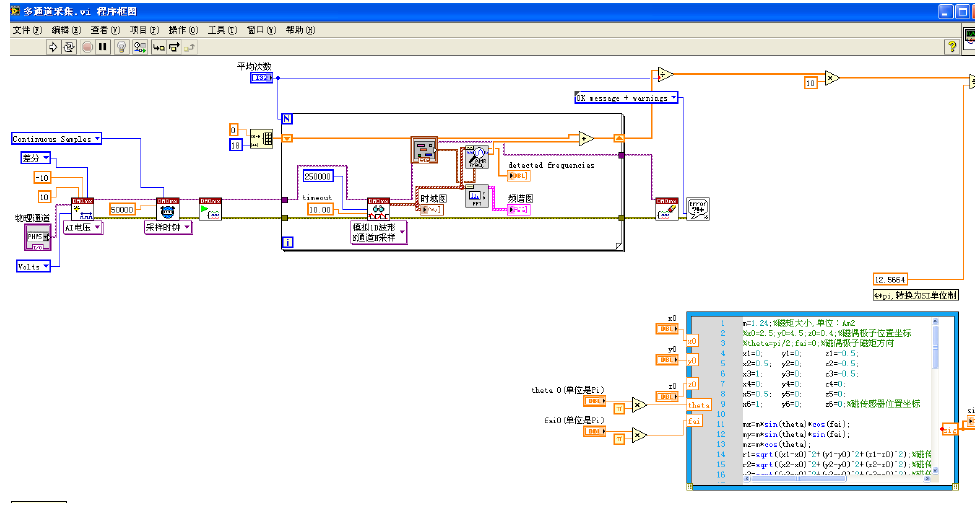
图5-2 部分程序
通过实验测试,系统运行稳定,测量精度比较高。目标磁源位置定位比较准确,定位误差小于5cm,夹角误差小于1 度,磁矩大小误差小于0.5Am2。并且对织物、人体等费金属介质不敏感。测试环境要求空旷无大的金属体。
六. 结论
实验中的定位误差主要来源于以下几个方面:磁偶极子模型误差、算法误差、数据测量误差、硬件电路误差及外界噪声干扰误差等。实验中磁源的空间磁场分布是由磁偶极子模型建立的,而模型有假设条件,这与实际情况存在差异,由此带来模型误差。定位算法通过牛顿迭代算法来逼近设置的误差最小值来求解的,因此计算值与实际值有一定误差。另外,实验中各种测量仪器也会引入误差,以及周围环境噪声干扰因素,这些都影响了定位精度。
|

