

机器视觉运动控制一体机在SCARA机器人柔振盘上下料的应用
http://www.gkong.com 2025-07-08 10:39 深圳市正运动技术有限公司

市场应用背景
SCARA机器人是一种高效、高精度的圆柱坐标系工业机器人,专精于装配任务。其独特的机械结构赋予其在特定方向(通常是XY平面)高度顺应性,同时在垂直方向保持优异刚性。 SCARA机器人本体通常包含三个轴线平行的旋转关节轴,负责在平面内进行定位与定向,以及一个平移关节轴,驱动末端执行器完成Z轴运动。 凭借其特性,SCARA机器人广泛应用于3C电子、包装、汽车装配、器械制造、药品与食品生产及检测等领域。
典型应用场景:视觉引导柔性上下料
在此场景中,零散物料置于振动盘中。机器视觉系统首先识别物料的姿态(包括正反面)并进行精确定位,随后将获取的多个物料位姿信息引导SCARA机器人执行抓取。机器人将物料精准转移至预设目标工位,完成摆盘、装配或组装。该方案有效解决了小批量、多品种产品的自动化分拣难题,显著提升了生产柔性及效率。
市场上传统SCARA上下料的局限性:
● 系统集成复杂 需整合机器人、视觉系统、控制系统、供料单元等多类组件。设备间协议与数据格式差异易导致兼容性问题,显著延长调试周期。
● 速度与效率瓶颈 在高节拍生产场景下,其性能易受限于机械设计、视觉处理以及运动控制数据交互速度和性能,难以满足高产量或快速换料的生产需求。
● 数据孤岛问题 系统往往缺乏实时数据处理与远程监控能力,形成信息孤岛,阻碍智能制造升级,且难以与上层MES等系统无缝集成。
● 高投入成本 需采购多套独立硬件,同时面临高昂的人工与维护成本,导致企业总体运营成本居高不下。

正运动技术SCARA机器人视觉柔性上下料解决方案优势:
● 高度集成,即插即用 基于VPLC系列视觉运动控制一体机与RTFuse视觉系统,单机融合机器人控制、视觉处理、振动盘、IO以及附加轴驱动,彻底替代传统控制柜、工控机、PLC及独立视觉系统,实现即插即用。
● 场景覆盖广泛,精准高效 支持单相机定位、双相机飞拍二次纠偏、三相机料盘定位等先进视觉方案,满足各类物料在分拣、摆盘、编带、装配等环节的严苛需求。
● 降本增效显著 硬件整合大幅降低初始投入与维护成本;即插即用特性显著缩短部署调试周期,助力客户快速提升产能与柔性。

01 机器视觉运动控制一体机在SCARA机器人柔振盘上料的应用
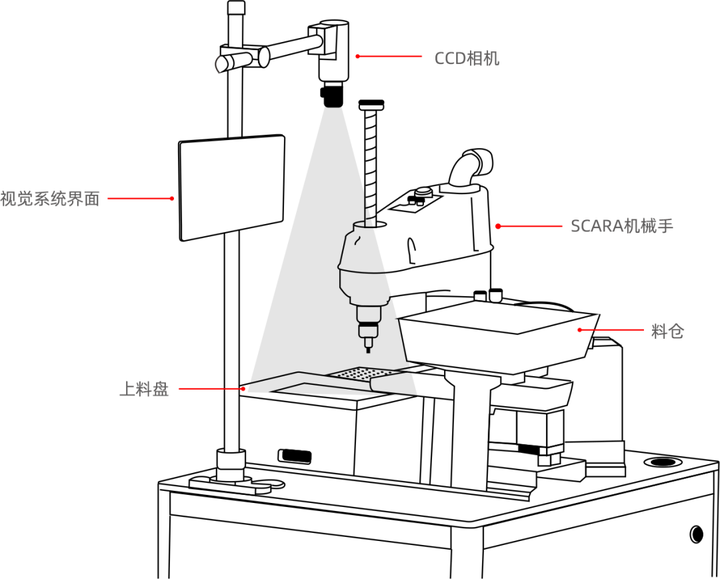
▲ SCARA机械手柔性上下料加工示意图 ▲
SCARA机械手柔性上下料视频演示可点击→“机器视觉运动控制一体机在SCARA机器人柔振盘上下料的应用”查看。
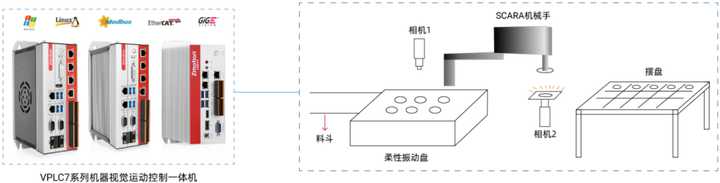
正运动SCARA视觉多物料分拣解决方案架构

- 20DI:启动/复位/停止按钮、负压检测、原点信号等;
- 20DO:相机触发、破/吸真空、三色灯蜂鸣器、机器人报警等;
- EtherCAT接口:接EtherCAT总线驱动器,控制SCARA并联机械手;
- 4路单端脉冲输出:接步进/脉冲驱动器、编码器轴;
- RS232/RS485接口:光源控制器、柔振盘通讯等;
- EtherNET接口:千兆网口,接支持Gige协议的面阵相机,实现视觉定位、纠偏。
柔性振动盘多协议兼容
正运动SCARA机械手柔性上下料解决方案支持多种柔性振动盘通讯协议,本方案采用I/O信号触发实现高效交互。 通过厂商调试软件即可快速调节振动参数,精准适配物料输送需求。

运动控制与机器视觉实现过程
| 运动控制
方案通过I/O或通讯信号启动振动盘高频振动,实现物料均匀分布。上相机对物料进行正反面识别与视觉定位。基于此定位数据,SCARA机器人沿预设路径精确移动,执行抓取、二次拍摄和下料操作。整个过程中,控制系统实时调节各关节速度,保障运动轨迹平滑。
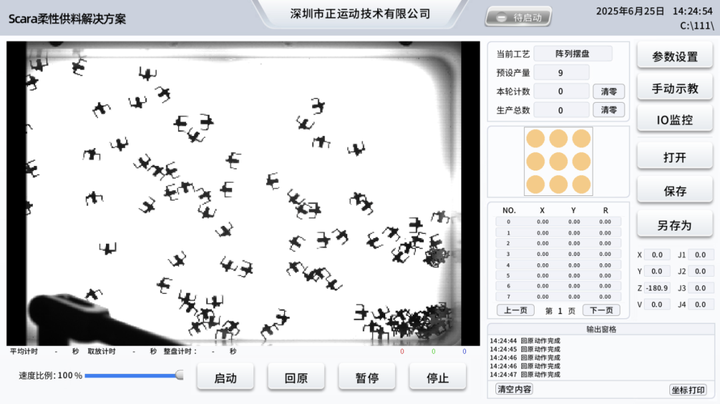
▲ 运行界面 ▲
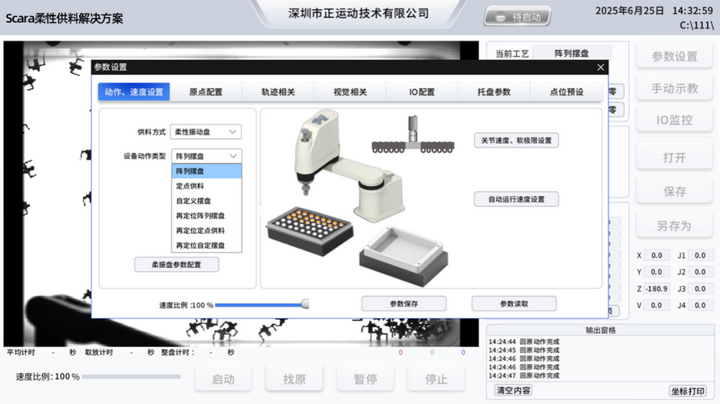
▲ 工艺动作类型选择 ▲
| 机器视觉
当SCARA机器人进行柔性上下料作业时,机器视觉系统首先利用形状匹配工具对料盘物料进行粗定位。在通过视觉定位获取物料的世界坐标系后,该系统引导机器人完成抓取动作。 随后,抓取的物料在移动过程中由下相机进行动态视觉定位(飞拍),实现二次精定位与实时位置纠偏。 最终,机器人依据纠偏数据精确运动至下料区完成放置,显著提升定位精度。
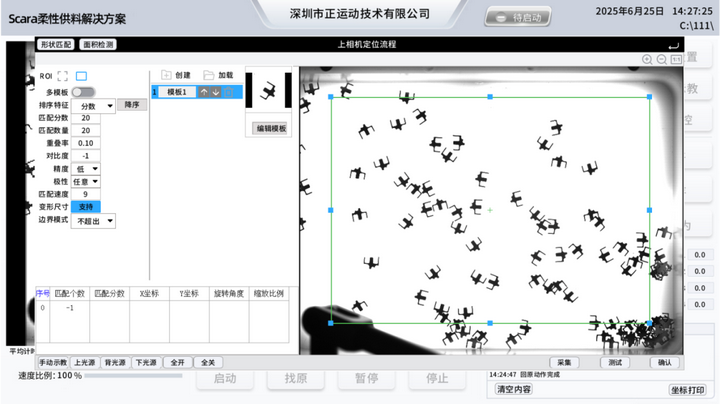
▲ 相机柔振盘定位-视觉模板创建 ▲

▲ 下相机二次飞拍定位-视觉模板创建 ▲
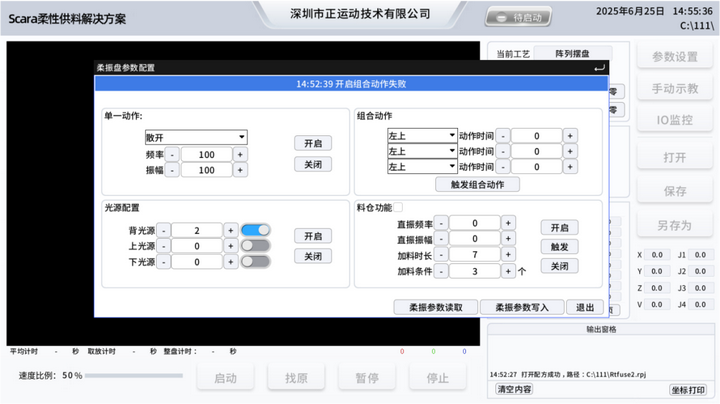
▲ 柔振盘参数设置 ▲

▲ 简易调试界面 ▲

▲ 标定与供料设置 ▲
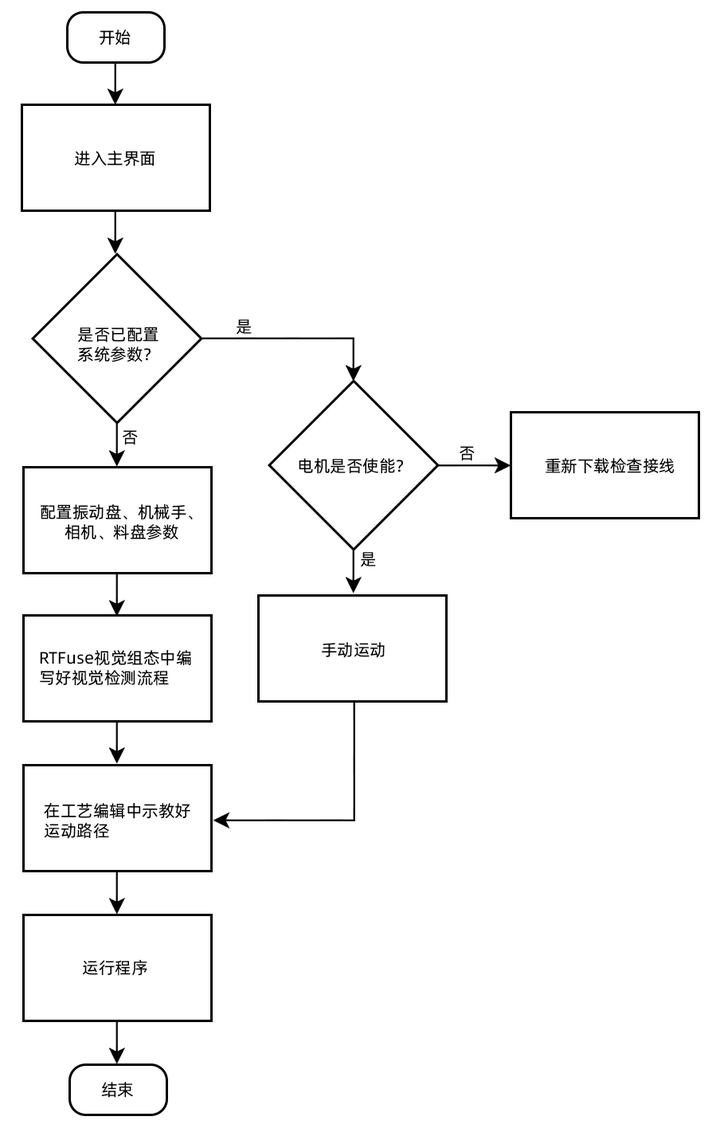
SCARA机械手柔性上下料配置流程
方案核心应用优势
- 高度集成化:集成丰富的IO控制、机器视觉、运动控制及通讯功能模块,灵活构建“运动控制+机器视觉”一体化的机械手柔振上下料解决方案。
- 调试方便、交付快:工程师无需编程,通过工具调参即可快速完成开发;可快速完成项目前期评估、缩短项目开发周期。
- 系统灵活性强:支持快速换线/换料,无需复杂机械拆装。通过软件轻松重配置参数,灵活适应生产计划变更,尤其适用于各类小型零部件的零散排列上料。
- 定位精度高:基于机器视觉系统精准识别物料位置,无需依赖固定治具限定物料方向,可准确定位振动盘中的物料。
- 显著降本增效:大幅减少人工操作需求,实现一人操作多台设备,有效缓解工程技术人员依赖。同时减少人为失误、返工及设备维修,降低运维成本与时间成本。
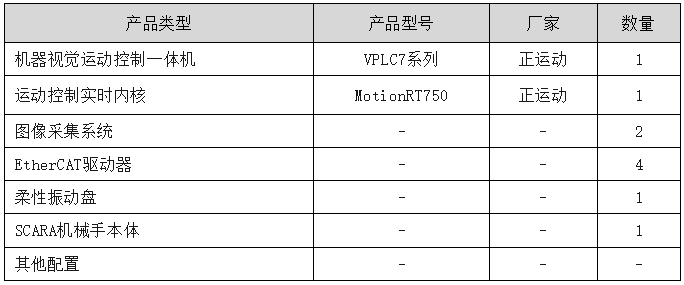
解决方案硬件配置
02 高集成机器视觉运动控制一体机VPLC712
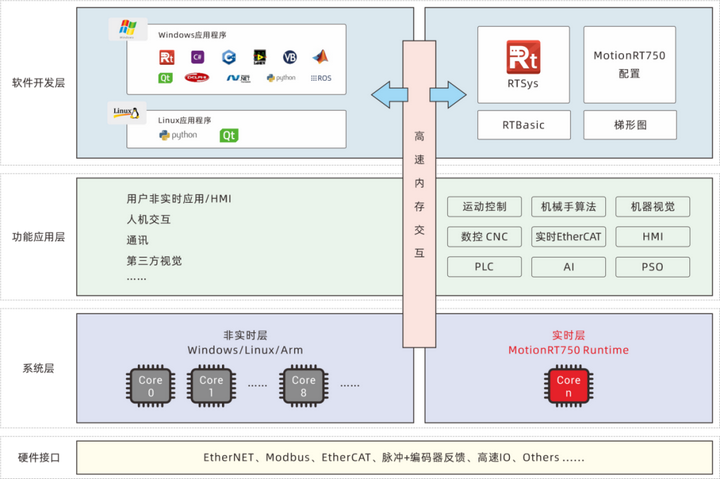
正运动技术VPLC712机器视觉运动控制一体机是一款基于x86架构的EtherCAT总线视觉运动控制器,采用一体化设计,将实时机器视觉、运动控制、IO和监控集成于一台多核控制器上,实现多任务并行实时处理自动化设备任务,通过共享内存机制,将PC部分硬件资源通过MotionRT750进行配置,实现核内高速交互,驱动执行器进行对应操作,完成设备整体的控制。
VPLC系列机器视觉运动控制一体机的安装与拆卸过程便捷,占地空间小,还能与其它控制单元部件(如伺服驱动器、传感器、编码器、控制阀等)无缝集成,提供一个完整端到端的视觉运动控制解决方案。
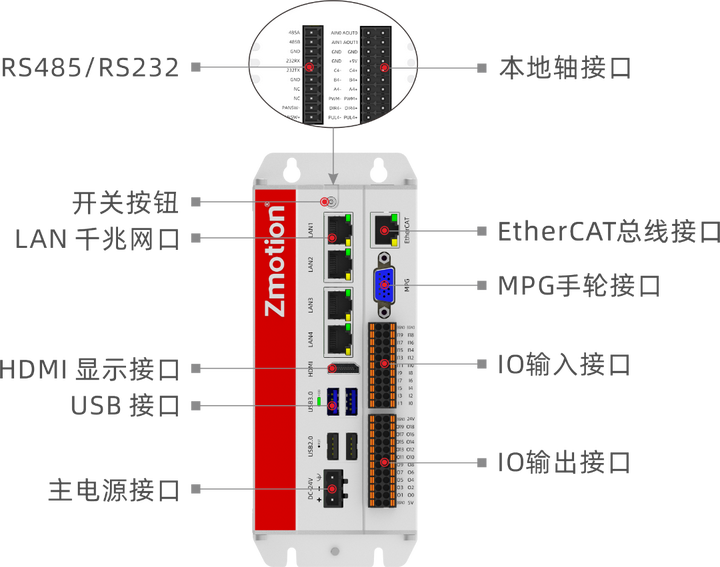
VPLC712机器视觉运动控制一体机,本身最多支持64轴,EtherCAT最小通讯周期可达到250us;板载20数字输入,20数字输出以及4路高速锁存输入;板载2路本地差分脉冲轴、2路AD和2路DA。
03 RTFuse视觉柔振上下料应用

正运动技术的RTFuse柔振上下料系统专为“视觉+运动控制”的柔振上下料应用设计,提供一站式解决方案。该软件简化了参数设置,搭配图像采集系统,可以大幅缩短开发周期,降低开发成本。
▌相机支持 支持市面上大部分主流相机,支持4个相机并行采集、视觉飞拍。
▌快速配置 机械手、轴组、飞达供料、相机和矩阵取料、工具参数。
▌示教功能 提供取料、飞拍及放料路径等多个点位的一键示教功能。
▌坐标校准 支持相机标定,包括修改XY坐标方向和世界坐标位置补正。
▌走位标定 通过示教好的运动点位,一键即可完成自动标定。
▌系统切换 可切换至RTFuse视觉组态系统,实现视觉检测流程。
▌可视化界面 界面友好,便于用户数据监控,实时显示使能状态、回原状态、定位数量和摆放计数等。
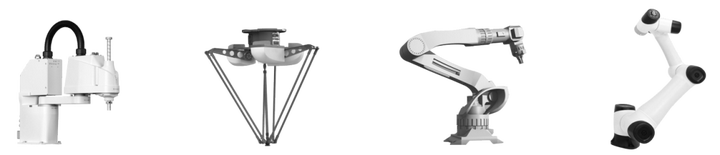
▌支持机械手类型 4轴模组、SCARA机械手、DELTA并联机械手、直角坐标机械手、6关节等。
为了帮助您更好地、更快速的开发和应用SCARA机器人柔振盘上料解决方案,我们为运动控制模块准备了详细的说明文档和源代码。进一步了解其使用方法、参数配置及实际应用案例,联系电话400-089-8936。

正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等 。
相关技术文摘
编辑精选新闻


