�ŷ�����˶�����ר��оƬ
����ֱ����ˢ�ŷ�����������ŷ�����������ŷ������ֱ�ߵ���������ĺ����㷨оƬ
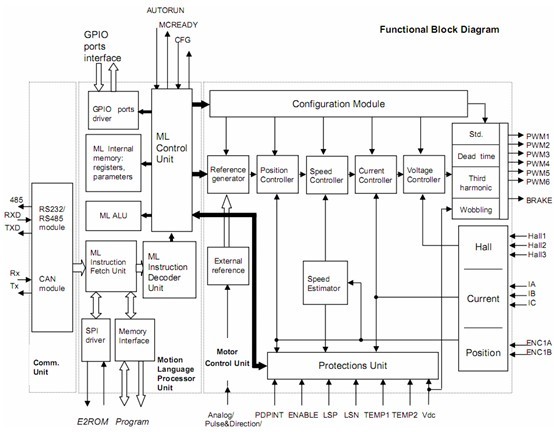
MotionDSPоƬ���ҹ�˾��������о���������һ�ֻ���ʵʱ���������ϵͳ�ġ�����ʽ�ġ��ռ�ʧ�����Ƶ��ŷ���������㷨ģ�顣�㷨д�������з���ר�������ڲ����������õ��û��ӿںͿ��ŵĶ��ο�����������������H��������ֱ���ŷ������3��ȫ����������ˢ�ŷ�������ŷ����ơ��ٶȿ��ƺ�ת�ؿ��ƣ�Ŀǰ�㷨�Ѿ��ɹ�Ӧ���ڴ�24�ߵ�3ǧ�ߵ��ŷ��������С�
����˵����
- �ɿ��ƽ����ŷ����(PMSM)����ˢ�ŷ����(BLDC)��ֱ���ŷ����(Brushed Motor)����������ಽ���ŷ����(Stepper Motor)��ֱ�ߵ��(Brushless Linear Motor)��
- ����ķ�������ʹ�ã�����ʽ��������Incremental Encoder������ת������(SSI)�������ұ�����(Sin-Cos Encoder)��ģ�������ٻ�(Tacho)�����Ի���������ֵ��������
- ֻ��Ҫ�Ե���IJ������������IJ������м����þͿ�����ɸ��ӵĵ���˶����ƣ�����Ҫ�Դ������ײ���б�̡�
- �ɵ��������������ӷ�ʽ�����������й�����
- ��ʵ�ֿ������ơ�ȫ���ֱջ����ƣ����Ʒ�ʽ�������ڲ�PLC�ջ����ơ��ⲿģ���������ջ����ơ��ⲿ����ͷ�������ıջ����ơ��ⲿץŭ�����ıջ����ơ�
- ����������ӿڷḻ������������ʽ�������ӿڡ������������ӿڡ����ٷ�����ӿڡ����Ի����ӿڡ������ұ������ӿڡ�����ֵ�������ӿڻ���ת�������ӿڣ���λ���ؽӿڣ��¶ȴ������ӿڣ�����˶�ʹ�ܽӿڣ�ͨ������IO�ڽӿڣ����U��V��W�ӿڣ�
- ͨ�Žӿڿ�ʹ�ã�RS-232�� RS-485 ��Can����(֧��CAN2.0��CAN Openͨ��Э��)��
��ͨ���������������Ķ��ο�������˶����ƹ��ܣ����Բ���Ҫ��λ���ṩ�������ϵͳ�ϵ�Ϳ����������õĵ���˶����߹�����


