ВњЦЗгХЪЦЃК
ЧПДѓЕФМцШнФмСІЃЌжЇГжЙњФкЭтжїСїЯрЛњгызмЯпЫХЗўЃЛ
жБНгКЫФкНЛЛЅЃЌБШPCI/PCIeЪ§ОнНЛЛЅПьвЛИіЪ§СПМЖЃЛ
ФкжУLinuxЯЕЭГЃЌПЩДњЬцЙЄПиЛњ + ЛњЦїЪгОѕ + дЫЖЏПижЦПЈЕФДЋЭГЗНАИ;
RTBasicЛђRTPlcЬнаЮБрГЬЃЌЛсPLCвВФмЭцзЊЛњЦїЪгОѕгІгУЁЃ
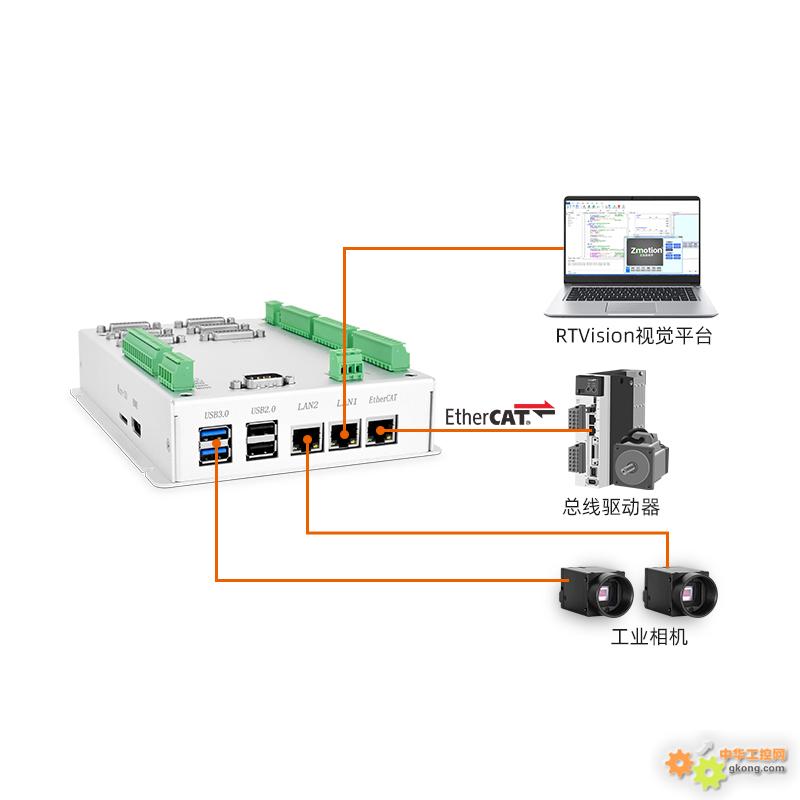
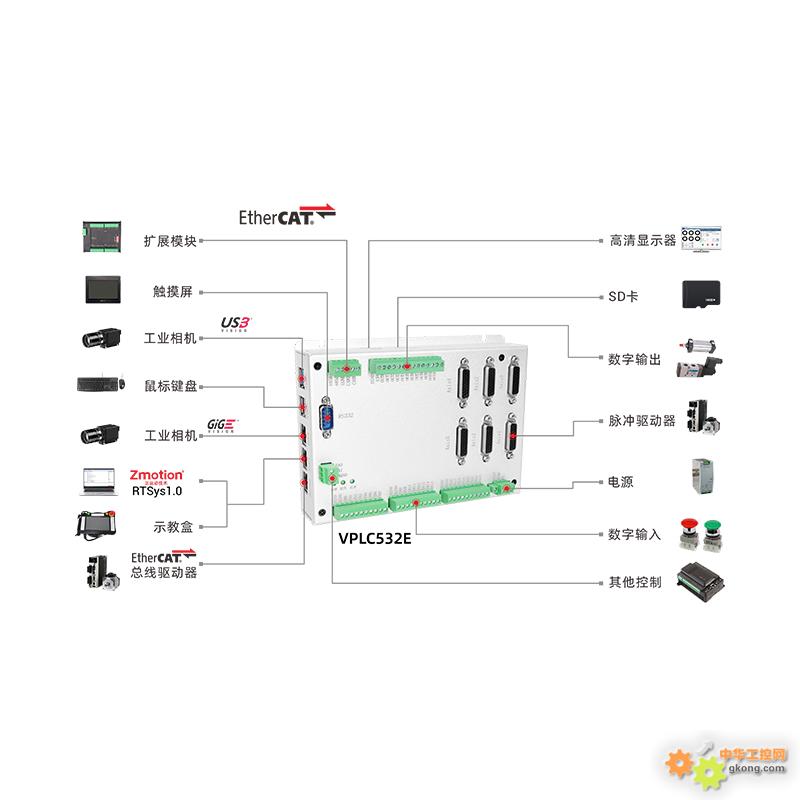
ИпадФмEtherCATзмЯп+ТіГхПижЦЃК
6-32жсПЩбЁЃЌEtherCATзмЯпКЭТіГхПЩвдЛьКЯЪЙгУЃЛ
EtherCATЭЌВНжмЦк100usЃЛ
6ТЗ10MHzИпЫйТіГхЪфГіЁЃ

СщЛюЕФПЊЗЂЗНЪНЃК
ПЩЭбЛњЖРСЂдЫааЃЌжЇГжRTBasicКЭRTPlcЬнаЮЭМПЊЗЂЃЛ
жЇГжЭјТчЪНPCЩЯЮЛЛњПЊЗЂЃЈC# / C++ / Labview / Qt / Python / vb / .NET / ROS / MATLAB / Delphi / linux ЃЉЃЛ
ПЩжЇГжPCГЬађКЭПижЦЦїФкжУГЬађЭЌЪБЙЄзї;
ЖржжМгУмЗНЪНЃЌШЗБЃгУЛЇГЬађАВШЋЁЃ