|
概述
EtherCAT系列交流伺服驱动器采用高速数字信号处理器(DSP)作为控制核心、采用智能IGBT模块(IPM)作为功率输出级,具有效率高、体积小、保护功能完善等优点。可匹配512线、2500线、12位、17位、20位等多种4线制单/多圈绝对值光学编码器。
基于EtherCAT网络的一主多从高性能伺服控制系统在网络性能上达到了一个新的高度。1000个分布式I/O数据的刷新周期仅为30μs,其中包括端子循环时间。通过一个以太网帧,可以交换高达1486字节的过程数据,几乎相当于12000个数字量I/O。而这一数据量的传输仅用300μs。利用 EtherCAT 技术的优异性能,可以实现用传统现场总线系统所无法实现的控制方法。这样,通过总线也可以形成超高速控制回路。
本系列伺服驱动器满足标准EtherCAT协议。支持CiA402规格所有的CoE模式及EtherCAT的各项命令模式,支持周期性同步运行模式如周期性同步位置CSP模式,周期性同步速度模式CSV模式,周期性同步扭矩CST模式。支持分布式时钟功能,可以实现多个伺服精确同步。
主要技术特征
- 控制回路电源AC220V(-20%~20%),主回路电源AC220V(-20%~+15%)或AC380V(-20%~+15%)
- 三倍过载
- 适配电机额定功率范围50W~15KW
- 匹配多款4线制编码器
- 标配12个普通数字隔离输入接口,6个输出接口
- 标配USB维护通道
- 标配Ethernet维护通道
- 符合标准EtherCAT协议
- 支持CanOpen协议(CoE),及应用行规CiA402
- 支持分布式时钟
- 支持周期性同步运行模式CSP、CSV、CST
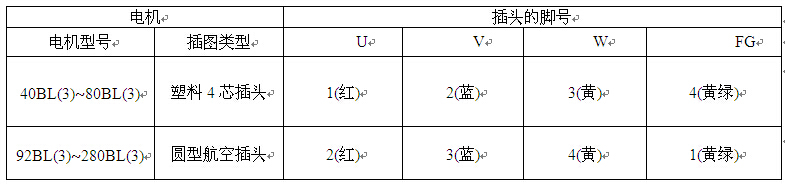
1、 四线制编码器接线图(JP1)
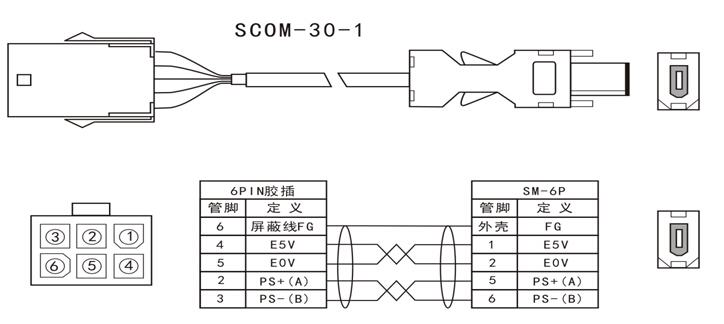
图1.1 电机端为塑料插头,驱动器端为1394插头
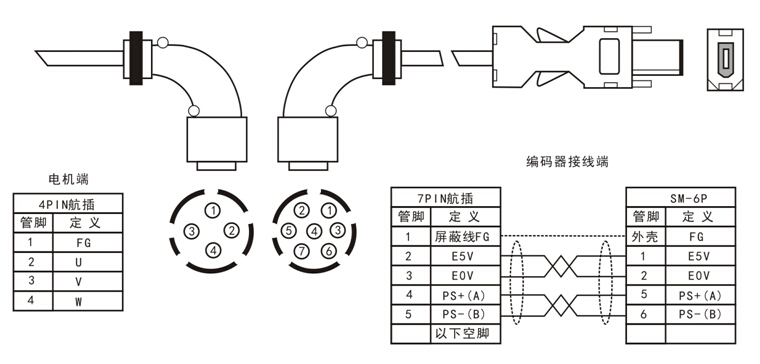
图1.2电机端为航空插头,驱动器端为1394插头
2、 控制信号输入/输出接线端子(JP2) 定义:
控制信号接线端子(JP2)为控制信号输入输出接口,为50PIN高官接口。12个一般数字量输入、6个一般数字量输出。该款伺服驱动器对外提供12V,100mA的直流电源,稳压精度5%。
|
名称定义
|
管脚
|
定 义
|
|
X0
|
7
|
输入I/O X0。
|
|
X1
|
8
|
输入I/O X1。
|
|
X2
|
9
|
输入I/O X2。
|
|
X3
|
34
|
输入I/O X3。
|
|
X4
|
10
|
输入I/O X4。
|
|
X5
|
11
|
输入I/O X5
|
|
X6
|
36
|
输入I/O X6
|
|
X7
|
12
|
输入I/O X7。
|
|
X8
|
37
|
输入I/O X8 。
|
|
X9
|
43
|
输入I/O X9 。
|
|
X10
|
42
|
输入I/O X10。
|
|
X11
|
19
|
输入I/O X11。
|
|
DI_COM+
|
13
|
输入端子公共正极。
|
|
E12V
|
46
|
内部提供用于I/O的控制电源+12V。
|
|
EGND
|
47
|
内部提供用于I/O的控制电源0V。
|
|
Y0
|
39
|
Y0,定位完成输出,为集电极开路输出。
|
|
Y0_E
|
38
|
Y0输出负极。
|
|
Y1
|
41
|
Y1,报警输出,为集电极开路输出。
|
|
Y1_E
|
40
|
Y1输出负极。
|
|
Y2
|
22
|
Y2,伺服准备好输出,为集电极开路输出。
|
|
Y2_E
|
44
|
Y2输出负极。
|
|
Y3
|
20
|
Y3输出,为集电极开路输出。
|
|
Y3_E
|
21
|
Y3输出负极。
|
|
Y4
|
23
|
Y4输出,为集电极开路输出。
|
|
Y5
|
24
|
Y5输出,为集电极开路输出。
|
|
DO_COM-
|
25
|
Y4,Y5输出公共端。
|
|
Spd+
|
14
|
模拟速度指令输入端。
|
|
Spd-
|
15
|
模拟速度指令输入端(差分方式)。
|
|
CCWAT
|
16
|
反转模拟转矩指令输入端。
|
|
CCWAT-、CWAT-
|
17
|
转矩指令输入负极。
|
|
CWAT
|
18
|
正转模拟转矩指令输入端。
|
|
AGND
|
45
|
模拟地。
|
|
SM(选配)
|
50
|
D/A速度监视。
|
|
IM(选配)
|
49
|
D/A转矩监视。
|
|
FG
|
48
|
FG端子,内部与机壳相连。
|
2.1开关量信号接线图
2.1.1 开关量信号输入
开关量信号输入X0~X11,如图1.2所示。
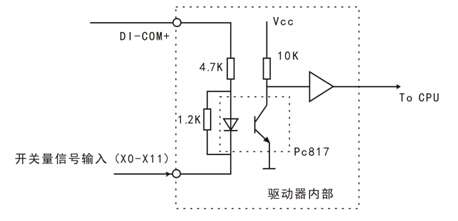
图2.1开关量信号输入接口图
2.1.2 开关量信号输出
驱动器开关量信号输出电原理图如图1.3所示。
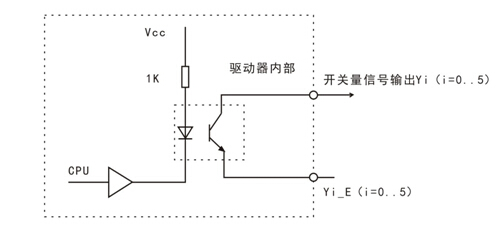
图2.2开关量信号输出接口图
注:不能驱动大于30V/50mA电流的负载,否则将会烧损输出接口!
3、EtherCAT网络接口(JP3、JP4)
用于连接主机和下位机,可以任意选择一个连接到主机控制器,另一个连接到下一个驱动器,方便组网;2个接口功能是一样的。
4、USB通讯口接线(JP5)
驱动板采用的是标准的USB接口,通过该接口可以对驱动器进行调试、监控波形、PLC程序编程等。
5、Ethernet通讯口接线(JP6)
驱动板采用的是标准的Ethernet接口,暂时是备用功能。
6、电机接线(CN1)
永磁电机不同于普通电机,必须按正确的相序接线,电机引出线红、蓝、黄分别对应驱动板的U、V、W,FG接驱动器外壳接地处。
7、制动电阻接线(CN2)
CN2为制动电阻接口,B1、B2短接时内接泄放电阻。外接泄放电阻时,需要先断开B1、B2间端接线,再把B1、P分别与泄放电阻相连。
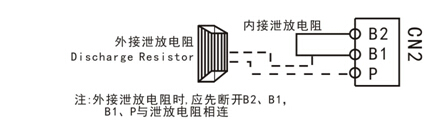
图7.1制动电阻接线图
8、驱动板电源接线(CN3)
r、s为控制回路电源供电端,接AC220V(-20%~20%)。R、S、T为主回路电源供电端子,需要根据实际订货是AC220V还是AC380V伺服进行相应接线,电压范围分别是AC220V(-20%~+15%)或AC380V(-20%~+15%),若是单相AC220V供电时,则应接在R、S端子上。
9、外形及安装尺寸
图1.6及图1.7分别是04型(对应功率100w~600w)、10型(对应功率750w~1500w)EtherCAT伺服驱动器外形及安装尺寸图。
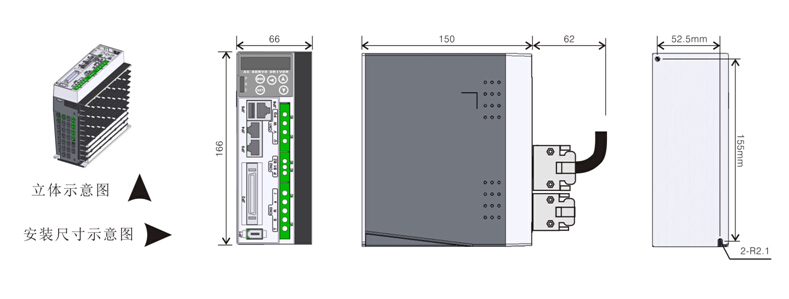
图9.1 04型(100w-600w)EtherCAT伺服驱动器外形及安装尺寸图
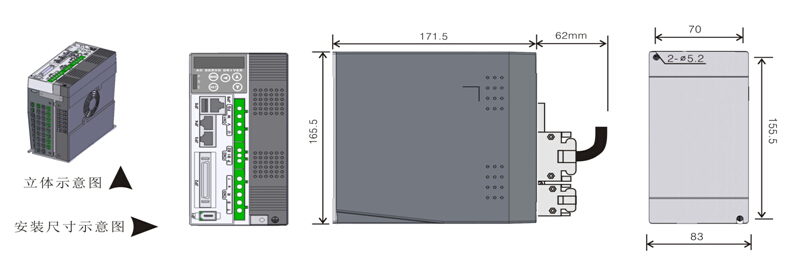
图9.2 10型(750w-1500w)EtherCAT伺服驱动器外形及安装尺寸图
10、总体电气接线图
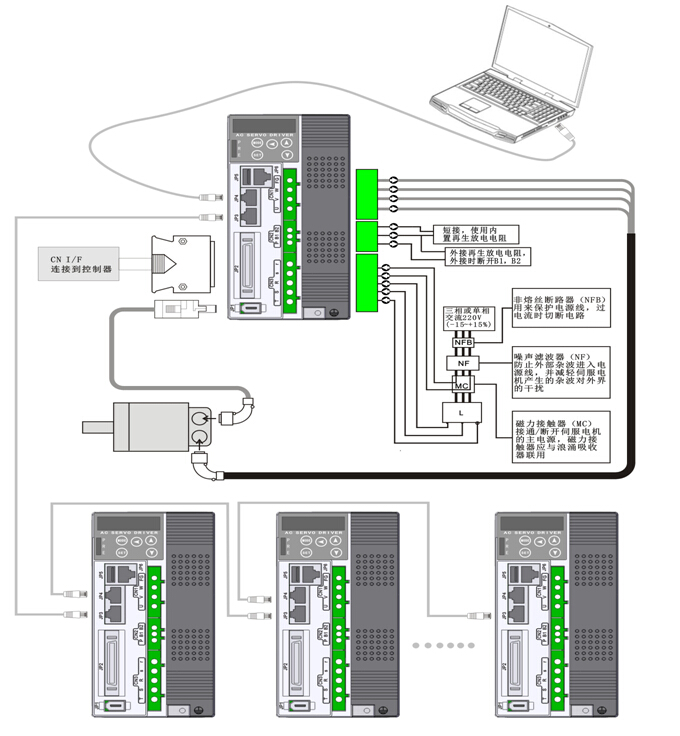
图10.1总体接线
11、伺服信号接线示意图
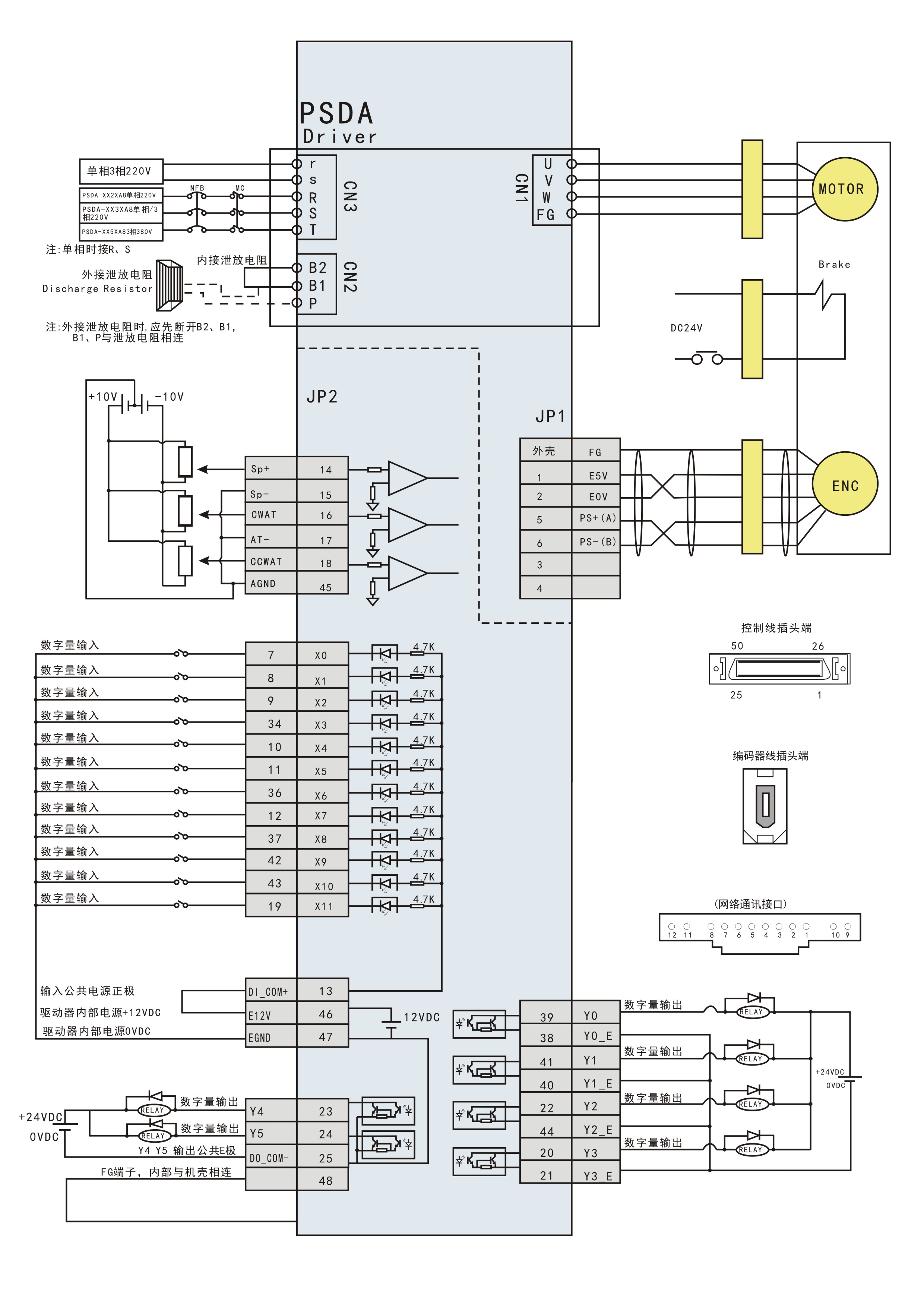
图11.1伺服信号接线
|

