--提示:启明智显专为智能产品提供一站式彩屏显示+连接+云端服务+APP软件开发、维护等解决方案,帮厂商快速实现硬件的智能化。作为启明云端旗下方案公司,我们用心整理了开发小伙伴在开发过程中可能会遇到的问题以及快速上手的简明教程,同时也用心整理了连接+显示应用的新方案!希望你能第一时间了解并快速用上好的方案和产品!--
## 一、LED PWM 控制器
### 1、简介
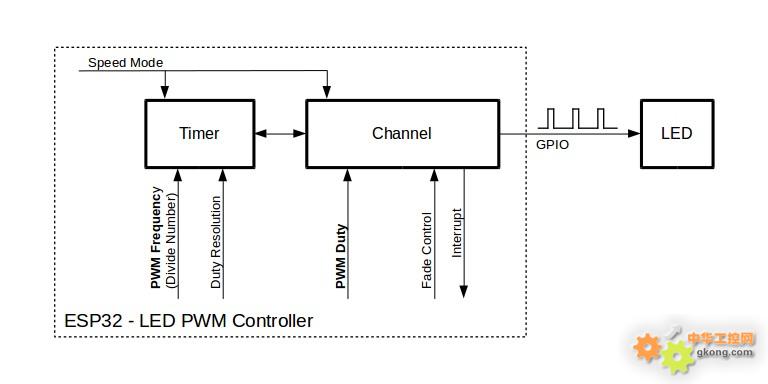
LED 控制器 (LEDC) 主要用于控制 LED,也可产生 PWM 信号用于其他设备的控制。 该控制器有 16 路通道,可以产生独立的波形来驱动 RGB LED 等设备。
LEDC 通道共有两组,分别为 8 路高速通道和 8 路低速通道。高速通道模式在硬件中实现,可以自动且无干扰地改变 PWM 占空比。低速通道模式下,PWM 占空比需要由软件中的驱动器改变。每组通道都可以使用不同的时钟源。
LED PWM 控制器可在无需 CPU 干预的情况下自动改变占空比,实现亮度和颜色渐变。
[参考](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html)
设置 LEDC 通道在 [高速模式或低速模式](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#ledc-api-high-low-speed-mode) 下运行,需要进行如下配置:
1. [定时器配置](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#ledc-api-configure-timer) 指定 PWM 信号的频率和占空比分辨率。
另一个可选步骤是可以在渐变终端设置一个中断。
在解释ESP32上的PWM功能之前,让我们讨论一些与PWM相关的术语。
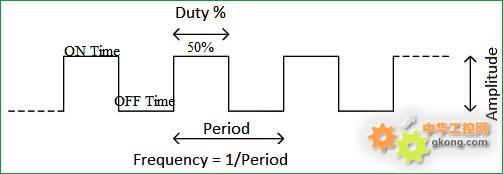
● **TON(导通时间)**:信号为高电平时的持续时间。
● **TOFF(关断时间)**:信号为低电平时的持续时间。
● **周期**:PWM信号的导通时间和关断时间之和。
● **占空比**:PWM信号周期内信号为高电平的时间百分比。
? 例如,如果总周期为10ms的脉冲保持 ON(高)5ms。然后,占空比将为:占空比 = 5/10 * 100 = 50%
● **PWM的频率:**PWM信号的频率决定了PWM完成一个周期的速度。一个周期是一个PWM信号的完整ON和OFF,如上图所示。
### 2、配置定时器
要设置定时器,可调用函数 [`ledc_timer_config()`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv417ledc_timer_configPK19ledc_timer_config_t),并将包括如下配置参数的数据结构 [`ledc_timer_config_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv419ledc_timer_config_t) 传递给该函数:
- 速度模式 [`ledc_mode_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv411ledc_mode_t)
频率和占空比分辨率相互关联。PWM 频率越高,占空比分辨率越低,反之亦然。如果 API 不是用来改变 LED 亮度,而是用于其它目的,这种相互关系可能会很重要。更多信息详见 [频率和占空比分辨率支持范围](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#ledc-api-supported-range-frequency-duty-resolution) 一节。
时钟源同样可以限制PWM频率。选择的时钟源频率越高,可以配置的PWM频率上限就越高。
时钟名称
时钟频率
速度模式
时钟功能
APB_CLK
80 MHz
高速 / 低速
/
REF_TICK
1 MHz
高速 / 低速
支持动态调频(DFS)功能
RTC8M_CLK
~8 MHz
低速
支持动态调频(DFS)功能,支持Light-sleep模式
**通道配置**
定时器设置好后,请配置所需的通道([`ledc_channel_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv414ledc_channel_t) 之一)。配置通道需调用函数 [`ledc_channel_config()`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv419ledc_channel_configPK21ledc_channel_config_t)。
通道的配置与定时器设置类似,需向通道配置函数传递包括通道配置参数的结构体 [`ledc_channel_config_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv421ledc_channel_config_t) 。
此时,通道会按照 [`ledc_channel_config_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv421ledc_channel_config_t) 的配置开始运作,并在选定的 GPIO 上生成由定时器设置指定的频率和占空比的 PWM 信号。在通道运作过程中,可以随时通过调用函数 [`ledc_stop()`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv49ledc_stop11ledc_mode_t14ledc_channel_t8uint32_t) 将其暂停。
### 3、示例
```c
ledc_timer_config_t ledc_timer = {
ledc_timer_config(&ledc_timer);
ledc_channel_config(&ledc_channel);
while (1) {
## 二、Motor Control Pulse Width Modulator(MCPWM)
### 1、简介
ESP32有两个MCPWM单元,可用于控制不同类型的电机。每个单元有三对PWM输出。
**作用**:
- PWM输出
每个A/B对可由三个定时器中的任何一个MCPWM定时器0、1和2中的任何一个时钟。(相同的定时器可用于时钟多对PWM输出)
从上图我们不难发现,MCPWM具有的功能(上图彩色的虚线框)有:
- `OPERATOR `操作器模块
**1、操作器模块 Operator**
**操作员 (Operator) 用于操作连接到MCPWM单元的电机。**例如改变旋转方向(顺时针或逆时针),或改变转速。
? 操作员输出一共有 3 对,我们可以对其施加控制信号。标记为“A”和“B”的称为一对。A、B均有自己对应的名为“Generator”的子模块来驱动诸如PWM的输出信号。
? 为了提供PWM信号,每个Operator本身由三个可用的定时器(MCPWM Timer)中的任何一个进行计时。
? 为了简化API,API会 自动关联 具有相同索引`Timer`以驱动`Operator`。例如`Timer 0`与`Operator 0`关联。
**2、捕获模块 Capture**
? 对于无刷直流电机,控制的要求之一是感应转子位置。
? 为了完成这一任务,每个 MCPWM单元提供三个传感输入以及专用的硬件。该硬件能够检测输入信号的边缘,并测量信号之间的时间。
? 因此,控制软件更简单,CPU功率可能用于其他任务。
注意:3个Capture可以在不使用PWM输出时**单独使用**,即只配置Capture实现边缘捕获功能。**因此MCPWM还可用于非电机外设**。例如,使用MCPWM的Capture0去捕获**HC-SR04**超声波模块ECHO引脚的高电平时间,进而实现测距。
**3、故障处理器模块 Fault Detect**
- 锁定输出的当前状态
- 设置低输出
- 设置高输出
- 开关输出
用户应确定电机可能的故障模式以及在检测到特定故障时应采取的行动。
例如:对有刷电机驱动所有输出为低,或对步进电机锁定电流状态等。这个动作会使电机处于安全状态,以减少故障造成的损坏的可能性。
**4、载波 Carrier和中断 Interrupts**
? 通过调用`mcpwm_isr_register()`可以注册MCPWM中断处理程序。
### 2、使用 MCPWM 输出 PWM 信号
#### 2.1 创建MCPWM
初始化MCPWM需要的步骤:
- 配置GPIO口
- 在一个`mcpwm_config_t`结构体中设置定时器频率和初始任务的设置。
- 非必须:设置定时器分辨率(默认为10,000,000)。使用函数`mcpwm_group_set_resolution() `和 `mcpwm_timer_set_resolution()`
1,配置GPIO口:使用函数mcpwm_gpio_init()或函数mcpwm_set_pin()。
两者的区别是前者为指定的功能配置 GPIO,而后者是一次性配置所有的GPIO。
**mcpwm_gpio_init()** //初始化一个GPIO
```c
**mcpwm_set_pin()** //配置所有与MCPWM有关的GPIO
```c
2,配置mcpwm参数
通过函数`mcpwm_init()`,传递一个`mcpwm_config_t`结构体指针
**mcpwm_init()**
```c
//示例
#### 2.2 PWM信号控制
- **1、设置为全速(非PWM信号)**
**mcpwm_set_signal_high(或low) ()** // 设置MCPWM的某个generator信号为高[或低]
```c
- **2、设置PWM信号**
**mcpwm_set_duty (in_us) ()** //设置占空比
```c
**mcpwm_set_duty_type()** //设置占空比类型,并恢复PWM输出
```c
- **3、启动输出**
**mcpwm_start(或stop)()** // 启动[或关闭]MCPWM输出
```c
### 3、示例
使用mcpwm驱动直流电机
```c
#define GPIO_PWM0A_OUT 15 //设置 GPIO 15 作为 PWM0A
//---------电机向前移动
//--------- 电机向后移动
mcpwm_set_duty_type(mcpwm_num, timer_num, MCPWM_OPR_B, MCPWM_DUTY_MODE_1);
//---------电机停止
//---------为直流电机配置MCPWM
//2. 初始化 mcpwm 配置
while (1)
void app_main(void)