|
ΫώΧλΘ§’ΐ‘ΥΕ·–Γ÷ζ ÷Ηχ¥σΦ“Ζ÷œμ“Μœ¬MotionRT7ΒΡΑ≤ΉΑΚΆ Ι”ΟΘ§“‘ΦΑ Ι”ΟC#≤ΌΉς…œΈΜΜζ«Α–η“ΣΉωΒΡ“Μ–©ΉΦ±ΗΙΛΉςΓΘ
01 MotionRT7ΦρΫι
MotionRT7 «…νέΎ –’ΐ‘ΥΕ·ΦΦ θΆΤ≥ωΒΡΩγΤΫΧ®‘ΥΕ·ΩΊ÷Τ Β ±ΡΎΚΥΘ§“≤ «ΙζΡΎ ΉΦ“Άξ»ΪΉ‘÷ςΉ‘―–Θ§Ή‘÷ςΩ…ΩΊΒΡWindows‘ΥΕ·ΩΊ÷Τ Β ±»μΚΥΓΘ

1.MotionRT7ΨΏ±Η“‘œ¬ΧΊΒψ
Θ®1Θ©ΕάΝΔ»μΦΰΑ≤ΉΑΘ§ ΚœΗς÷÷WindowsΒγΡ‘ΘΜ ¬Χ…ΪΟβΑ≤ΉΑΘ§ΩλΥΌΧε―ιΘΜ ≤…”Ο”≤ΦΰΑσΕ®ΒΡ‘Υ–––μΩ…÷Λ Ύ»®Θ®Έ¥ Ύ»®“≤Ω… ‘”ΟΘ©ΘΜ Ω…“‘ΖΫ±ψΒΡ≈δ÷ΟΓΔΤτΕ·ΓΔΝ§Ϋ”ΓΔΡΘΡβ‘Υ––Β»ΓΘ
Θ®2Θ©”κMotionRTΤδΥϋΑφ±ΨΙΠΡήΦφ»ίΘ§“Μ¥ΈΩΣΖΔΘ§Ω…ΩλΥΌ«–ΜΜΒΫ«Ε»κ ΫΘ§LinuxΗς÷÷ΤΫΧ®ΓΘ
Θ®3Θ©Ά≥“ΜΚ· ΐΩβΫ”ΩΎΘ§ΩλΥΌΒΡ±ΨΒΊLOCALΫ”ΩΎΘ§‘ΥΕ·Κ· ΐΒς”ΟΩλ÷ΝusΦΕ±πΘ§±»Τ’Ά®PCIΩ®Ωλ ΐ °±ΕΓΘ
Θ®4Θ©Φ·≥…ΜζΤς ”ΨθΘ§ΩλΥΌ¥νΫ®Ηςάύ‘ΥΕ·ΩΊ÷Τ+ΜζΤς ”ΨθΒΡ Β ±”Π”ΟΓΘ
Θ®5Θ©«Ω¥σΕύΩ®ΙΠΡήΘ§ΉνΕύ240 ÷αΝΣΕ·Θ§÷ß≥÷ΩγΩ®ΝΣΕ·Θ§¬ω≥ε”κΉήœΏΝΣΕ·Θ§’ώΨΒ”κΤΫΧ®ΝΣΕ·Θ§«αΥ… Βœ÷ΈΜ÷ΟΥχ¥φ / PSO Β»ΗΏΦΕΙΠΡήΓΘ
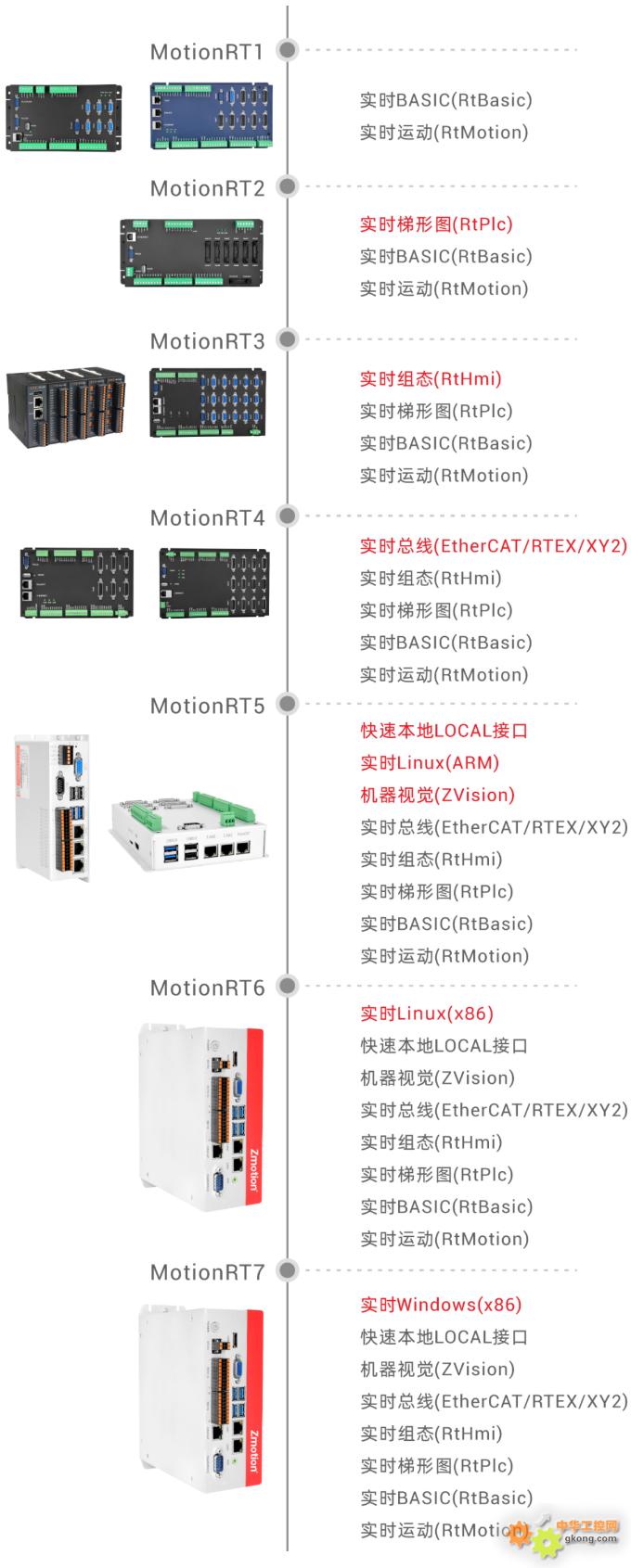
2.≥÷–χΒϋ¥ζΒΡ‘ΥΕ·ΩΊ÷Τ Β ±ΡΎΚΥMotionRT
MotionRT «’ΐ‘ΥΕ·ΦΦ θ≥÷–χΫ®…η”κΖΔ’ΙΒΡ‘ΥΕ·ΩΊ÷Τ Β ±ΡΎΚΥΘ§“―≤ΜΕœΒϋ¥ζΝΥ 7¥ζΘ§¥” MotionRT1ΒΫ MotionRT7ΓΘ
3.MotionRT7≤…”ΟΡΘΩιΜ·»μΦΰΦήΙΙ
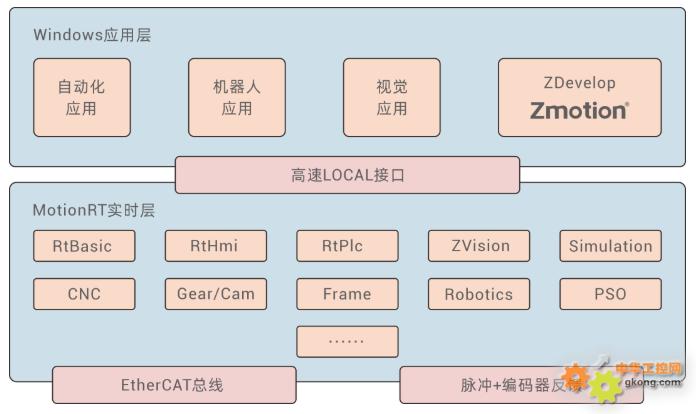
‘ΥΕ·ΩΊ÷Τ≥Χ–ρΓΔ ”ΨθΥψΖ®ΓΔMotionRT7‘ΥΕ·ΩΊ÷Τ“ΐ«φΘ§Ά®ΙΐΗΏΙ≤œμΡΎ¥φΫχ–– ΐΨίΫΜΜΞΘ§¥σ¥σΧα…ΐ‘ΥΕ·ΩΊ÷Τ”κΜζΤς ”ΨθΒΡΫΜΜΞ–ß¬ ΓΘ
”ΟΜßΉ‘Ε®“εΙΠΡήΘ§»ΎΚœGmcΓΔGear/CamΓΔFrameΓΔRoboticsΓΔCNC Β»ΥψΖ®Θ§¥ρ‘λ ”ΟΜßΒΡΉ®”ΟΩΊ÷ΤœΒΆ≥ΓΘ
4.Ά≥“ΜΩΣΖ≈ΒΡAPIΚ· ΐ
Ά≥“ΜΆξ…ΤΒΡSDKΩβ Θ§Υυ”–ΒΡΒΎ»ΐΖΫΩΣΖΔΜΖΨ≥Ά§“ΜΧΉAPIΫ”ΩΎΘ§ΩγΤΫΧ®ΒΡ≤ζΤΖΦήΙΙΘ§ΧαΗΏ–߬ Θ§±Θ≥÷Φφ»ί–‘ΓΘ

5.ΦρΒΞ“Ή”ΟΒΡ‘ΥΕ·ΩΊ÷ΤΙΠΡήΧΊ–‘
a.ΒψΈΜ‘ΥΕ·ΓΔ÷±œΏ≤ε≤ΙΓΔ‘≤ΜΓ≤ε≤ΙΓΔ¬ί–ΐ≤ε≤ΙΓΔΝ§–χΙλΦΘΦ”ΙΛΘΜ
b.ΒγΉ”ΆΙ¬÷ΓΔΒγΉ”≥ί¬÷ΓΔΆ§≤ΫΗζΥφΓΔΈΜ÷ΟΥχ¥φΓΔ–ιΡβ÷αΒΰΦ”ΘΜ
c.S«ζœΏΦ”ΦθΥΌΘ§SS«ζœΏΦ”ΦθΥΌΘ§ΙλΦΘ‘ΥΕ·Ηϋ»αΚΆΘΜ
d.1D/2D/3DΗΏΥΌΈΜ÷ΟΆ§≤Ϋ δ≥ωPS0Θ§≥δΖ÷¬ζΉψ ”ΨθΖ…≈ΡΓΔΗΏΥΌΒψΫΚΓΔΦΛΙβΦ”ΙΛΘΜ
e.ΩΆΜßΩ…Ή‘Ε®“ε‘ΥΕ·ΩΊ÷ΤΥψΖ®Μρ’ΏΜζΤς»Υ’ΐΖ¥ΫβΥψΖ®ΘΜ
f. ΖΫ±ψ”κΒΎ»ΐΖΫ ”Ψθ≈δΚœΓΘ
6.ΩΣΖ≈ΒΡEtherCAT”κ≈δ÷ΟΒς ‘ΙΛΨΏ
ZDevelopΨΏ±ΗΩΣΖ≈“Ή”ΟΒΡ≈δ÷ΟΘ§ΩΣΖΔΘ§Βς ‘Θ§’οΕœΒ»ΙΛΨΏΓΘΕχ«“ZDevelop «Ηω¬Χ…ΪΟβΖ―ΒΡ»μΦΰΘ§ΨΏ±Η÷αΒς ‘Θ§÷αΉ¥Χ§Θ§ Ψ≤®ΤςΒ»ΙΛΨΏΓΘ
MotionRT7ΙψΖΚ÷ß≥÷EtherCATΉήœΏΘ§MotionRT7÷ß≥÷ –Οφ…œΙψΖΚ“Ή”ΟΒΡEtherCATΥ≈ΖΰΘ§EtherCAT≤ΫΫχΘ§EtherCAT IOΘ§EtherCATΖßΒΚΘ§EtherCAT¥ΪΗ–ΤςΓΘ
Κσ–χΫΪ≥÷–χΆξ…ΤEtherCATΒΡ≈δ÷ΟΙΛΨΏΘ§≥÷–χ≈§ΝΠΉωΉνΚΟ”ΟΒΡ‘ΥΕ·ΩΊ÷ΤΓΘ
02 MotionRT7ΒΡΑ≤ΉΑΚΆ Ι”Ο
ΒΎ“Μ≤ΫΘΚΑ≤ΉΑ«ΐΕ·≥Χ–ρ
1.¥ρΩΣ“…η±ΗΙήάμΤς”Θ§―Γ‘ώ“≤ΌΉς”÷–ΒΡ“ΧμΦ”Ιΐ ±”≤Φΰ”Θ§≤Δ«“―Γ‘ώ“ ÷Ε·―Γ‘ώ”ΓΘ
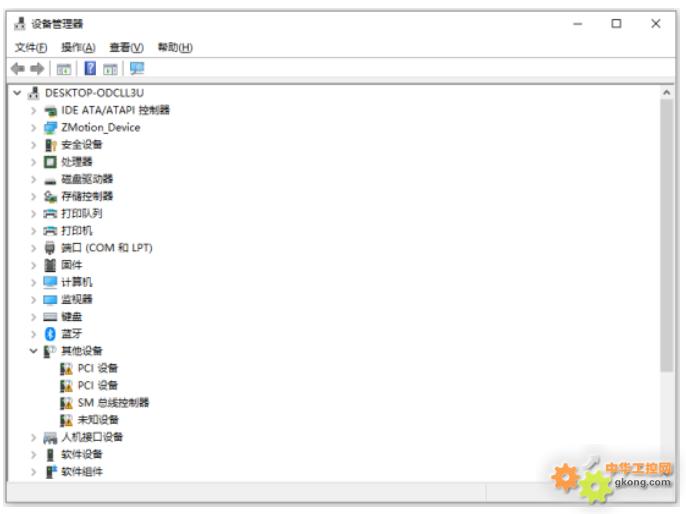
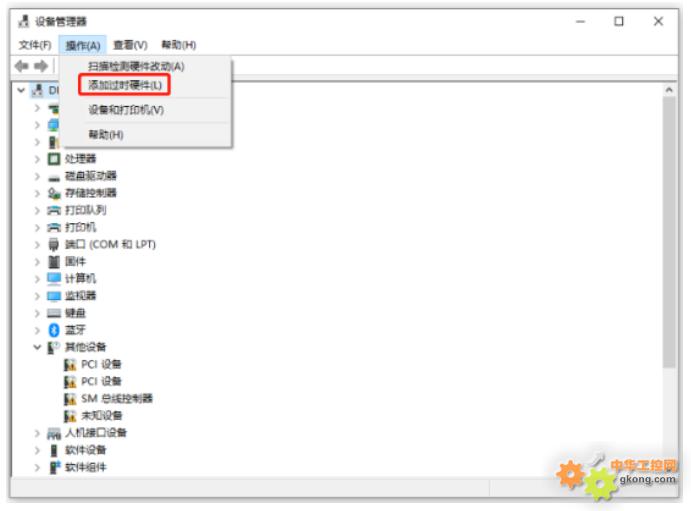
2.ΒψΜς“œ¬“Μ“≥”ΓΘ
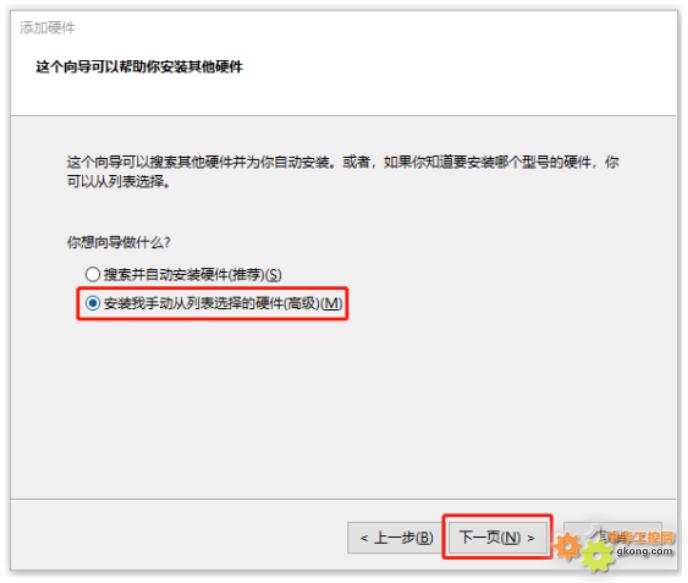
3.ΒψΜς“¥”¥≈≈ΧΑ≤ΉΑ”ΓΘ
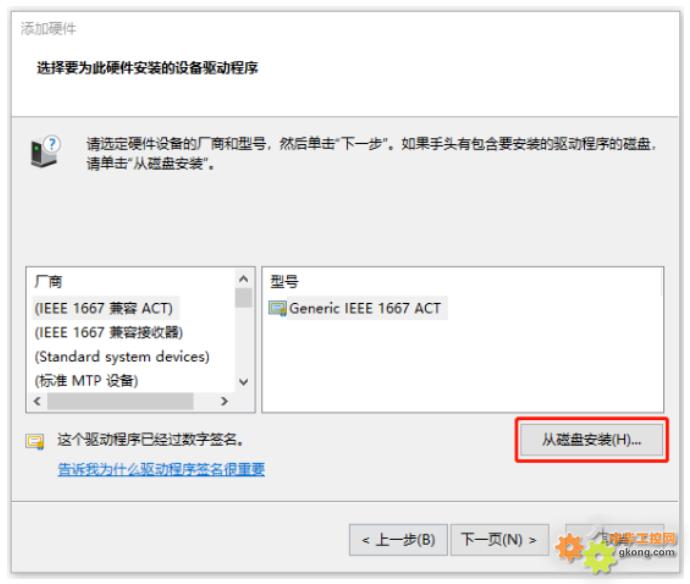
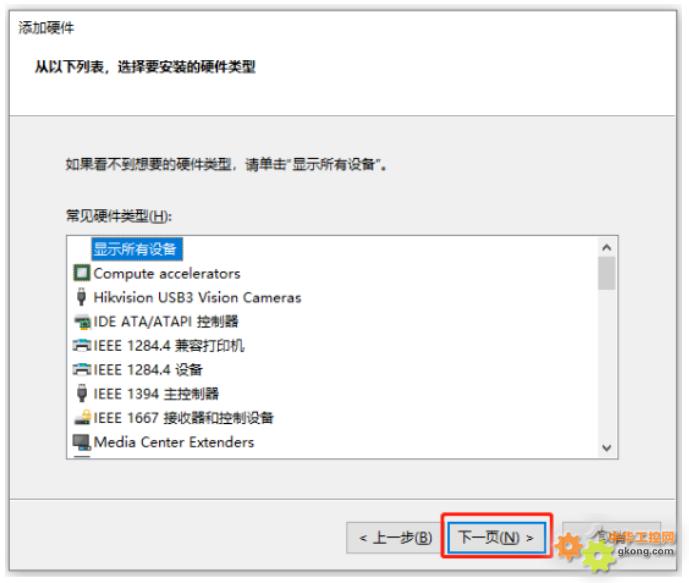
4.―Γ‘ώ«ΐΕ·ΤςΥυ‘ΎΒΡ¬ΖΨΕΘ§¥ρΩΣΈΡΦΰΦ–“driver_signed”Θ§―Γ‘ώ“MotionRt64.sys”ΓΘ

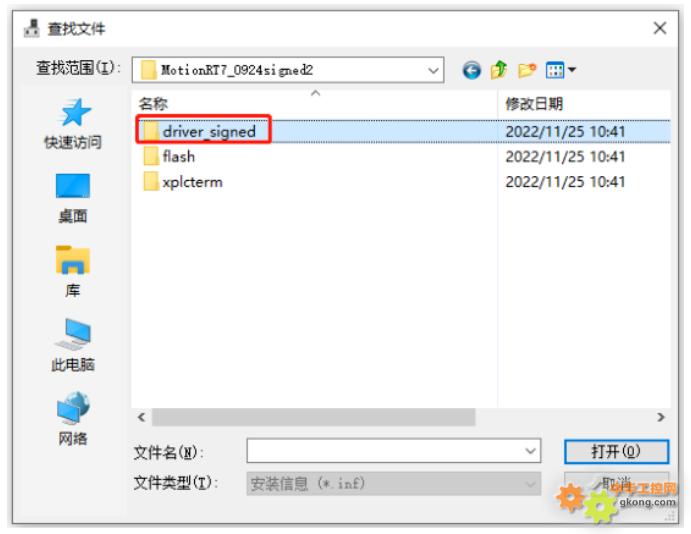
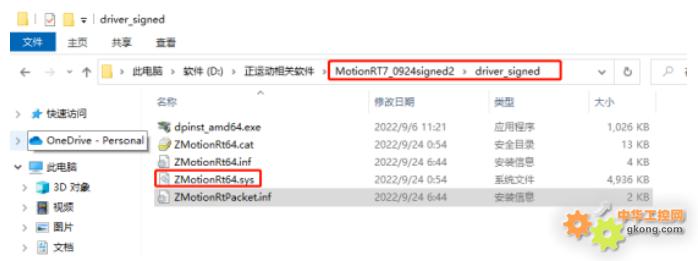
5.»ΜΚσ“Μ÷±ΒψΜςœ¬“Μ≤ΫΘ§÷±ΒΫΑ≤ΉΑΆξ≥…ΓΘ
ΉΔ“βΘΚ«ΐΕ·Ηϋ–¬ ±Θ§“Σ¥”…η±ΗΙήάμΤς…Ψ≥ΐ…η±ΗΘ§“ΜΕ®“Σ―Γ‘ώΑ―«ΐΕ·ΈΡΦΰ“≤…Ψ≥ΐΓΘ
6.MotionRT7«ΐΕ·Α≤ΉΑ ”ΤΒ―ί ΨΓΘ
ΒΎΕΰ≤ΫΘΚ‘Υ––ΩΊ÷ΤΧ®≥Χ–ρ
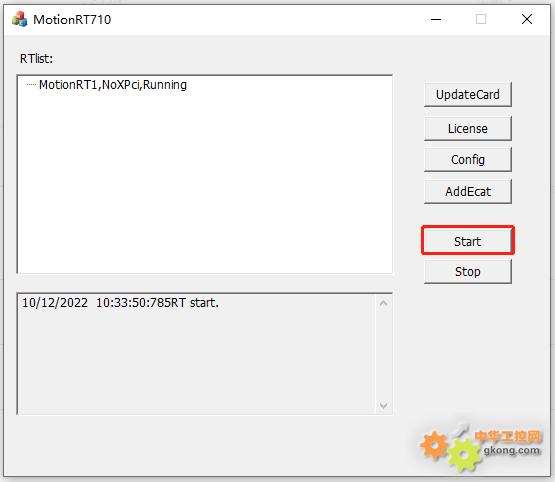
1.¥ρΩΣΩΊ÷ΤΧ®≥Χ–ρΥυ‘ΎΈΜ÷ΟΘ§‘Υ––Ω…÷¥––ΈΡΦΰ“MotionRt710.exe”ΓΘ
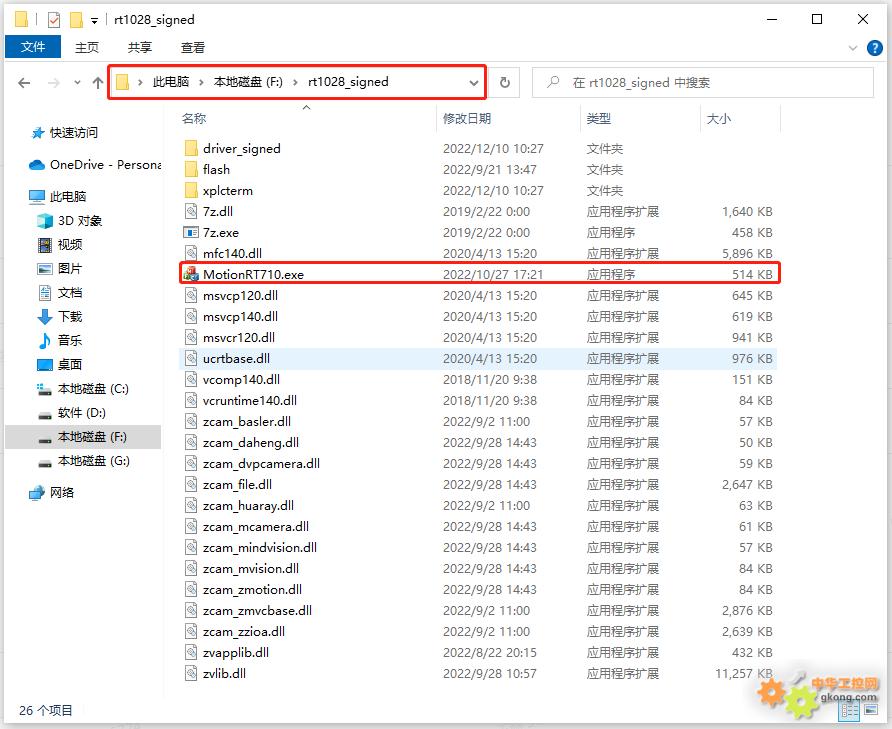
2.ΒψΜς“Start”ΓΘ
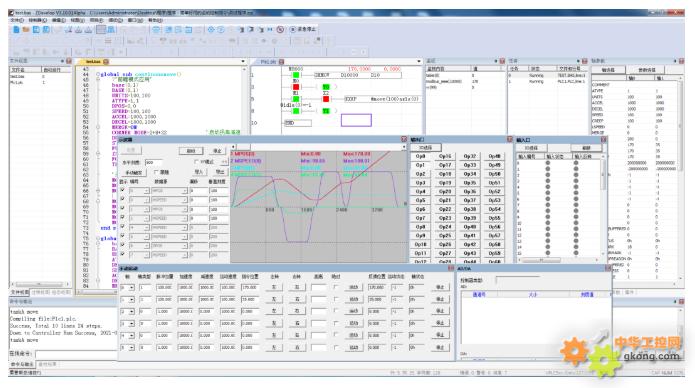
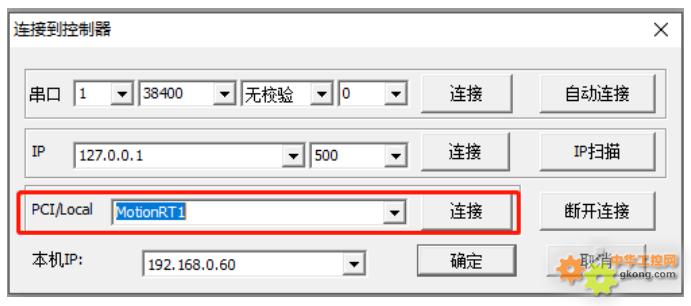
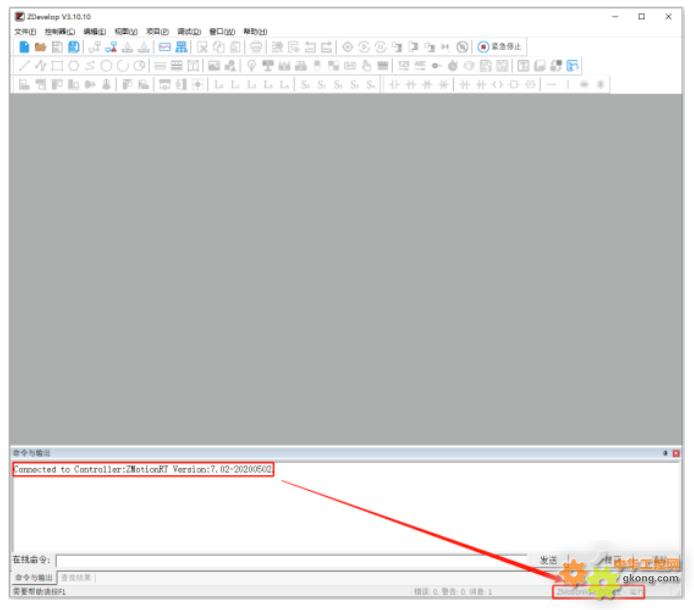
ΒΎ»ΐ≤ΫΘΚ Ι”ΟZDevelop»μΦΰΝ¥Ϋ”ΒΫΩΊ÷ΤΤςΘ§Ϋχ––≤Έ ΐΦύΩΊ
ZDevelopΝ¥Ϋ”ΩΊ÷ΤΤςΘ§»μΦΰΑφ±Ψ3.10“‘…œΘ§ Ι”ΟPCI/LOCALΖΫ ΫΫχ––Ν§Ϋ”ΓΘ
ΒΎΥΡ≤ΫΘΚΆχΩΎά©’ΙEtherCAT÷ς’Ψ–≠“ι
1.≤ιΩ¥Άχ¬γΝ§Ϋ”ΓΘ
2.―Γ‘ώ”ΟΉςEtherCATΒΡΆχΩ®Θ§”“Φϋ τ–‘Θ§Α≤ΉΑ–≠“ιΓΘ
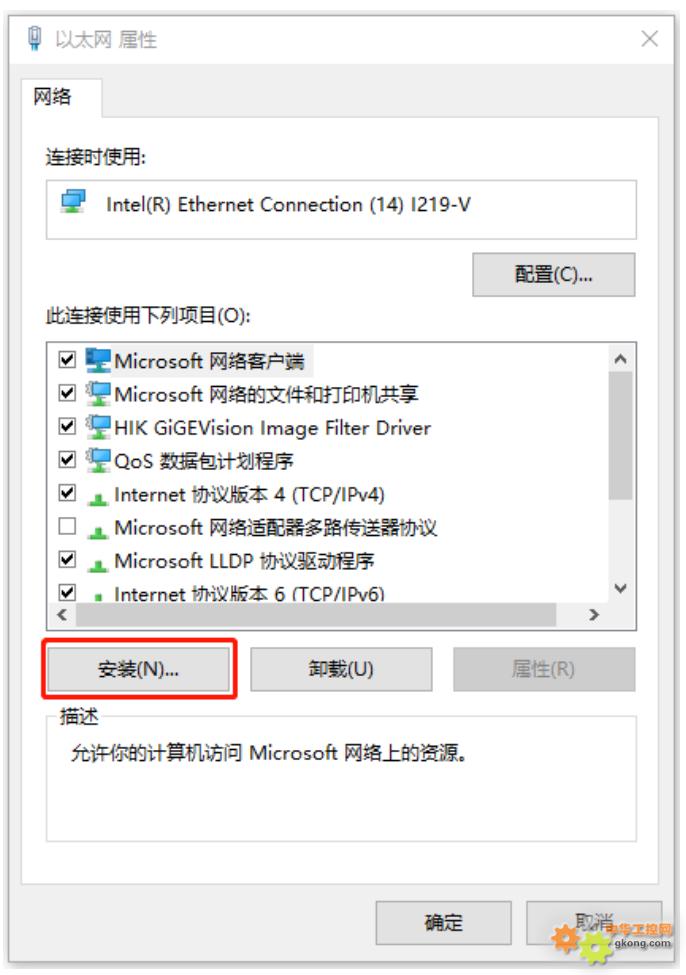
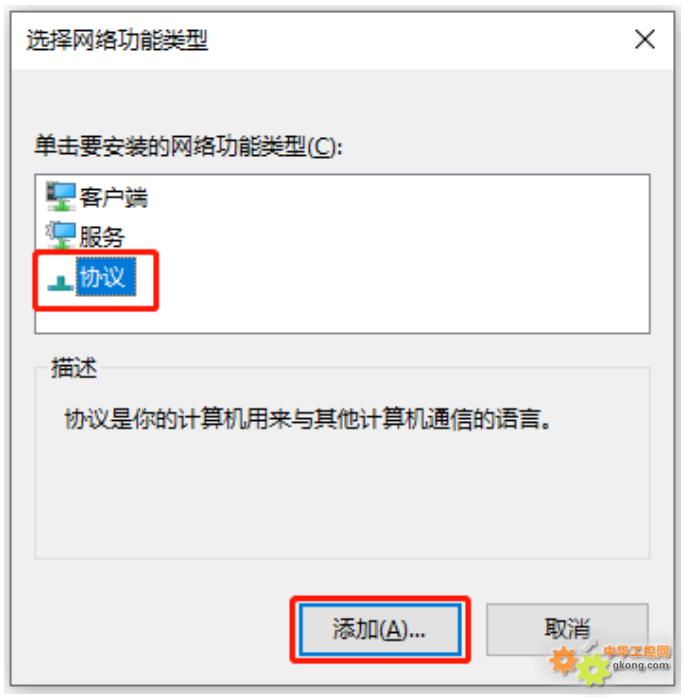
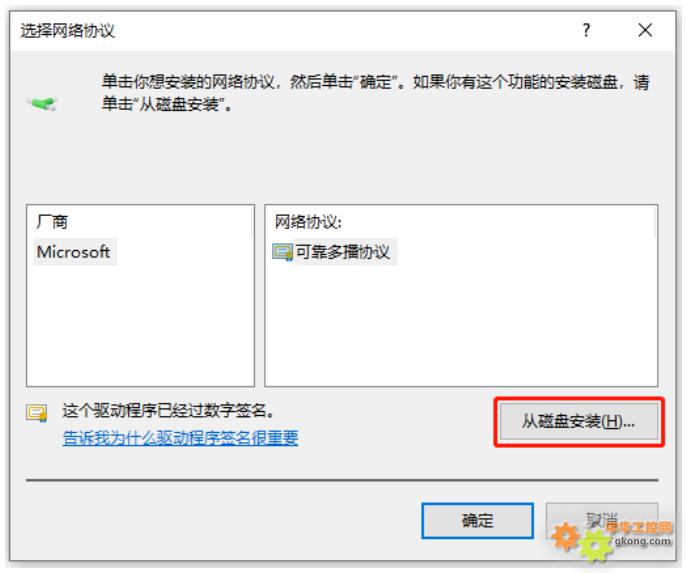
3.ΒψΜς¥”¥≈≈ΧΑ≤ΉΑΘ§―Γ‘ώ«ΐΕ·ΤςΥυ‘ΎΒΡ¬ΖΨΕΘ§¥ρΩΣΈΡΦΰΦ–”driver_signed”Θ§―Γ‘ώ“MotionRtPacket.inf”ΓΘ

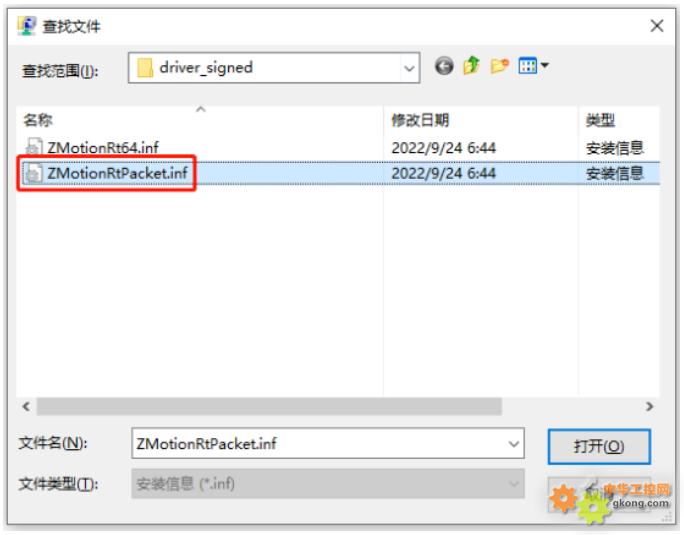
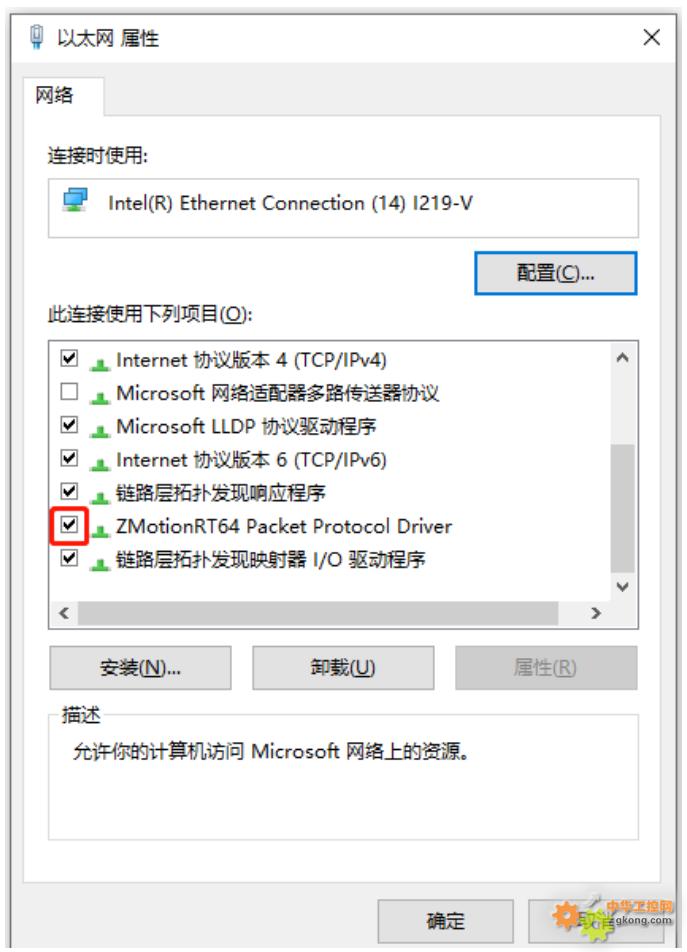
4.Α≤ΉΑ≥…ΙΠΚσΘ§»Ζ»œMotionRT64 Packet Protocol Driver«ΑΟφ”–―Γ…œΓΘ
‘ΎRTΩΊ÷ΤΧ®≥Χ–ρ―Γ‘ώ‘ωΦ”AddEcatΘ§’β ±ΡήΩ¥ΒΫΕ‘”ΠΆχΩ®Θ§―Γ‘ώ…œΘ§»ΜΚσΤτΕ·RTΓΘ

5. MotionRT7 EtherCAT–≠“ιΑ≤ΉΑ ”ΤΒ―ί ΨΓΘ
Ή‘¥χPCΒΡΆχΩ®EtherCAT”–“ΜΕ®ΒΡ Β ±–‘Θ§»γEtherCAT“ΣΧα…ΐ–‘ΡήΘ§–η“ΣΑ―ΆχΩΎΤδΥϋΒΡ–≠“ιΕΦ»ΞΒτ“‘Χα…ΐ Β ±–‘ΓΘ
»γ–ηΫχ“Μ≤ΫΧα…ΐ Β ±–‘Θ§«κ Ι”Ο’ΐ‘ΥΕ·Ή®Ο≈ΒΡEtherCAT‘ΥΕ·ΩΊ÷ΤΩ®XPCIE1032ΓΘ
ΗϋΕύΙΊ”ΎMotionRT7ΒΡ≤Έ ΐ…η÷Ο“‘ΦΑœύΙΊΈ ΧβΘ§«κ≤Έ’’“MotionRT7ΥΒΟς ι” ΓΘ
œύΙΊΉ Νœ«κ…œ’ΐ‘ΥΕ·ΦΦ θΙΌΆχwww.zmotion.com.cnΜρ’ΏΝΣœΒ’ΐ‘ΥΕ·œύΙΊ»Υ‘±ΓΘ
03 C#Ϋχ––MotionRT7œνΡΩΒΡΩΣΖΔΘ®ΩΣΖΔΜΖΨ≥vs2022Θ©
1.–¬Ϋ®C#œνΡΩ
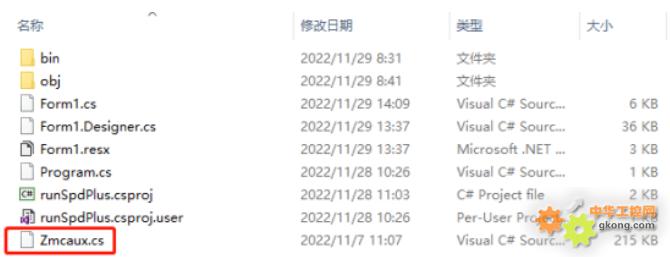
2.ΒΦ»κ“Zmcaux.cs”Θ§“zauxdll.dll”Θ§“zmotion.dll”
Θ®“Zmcaux.cs”Ζ≈‘ΎœνΡΩΈΡΦΰ÷–Θ§”κbinΡΩ¬ΦΆ§ΦΕΘ©
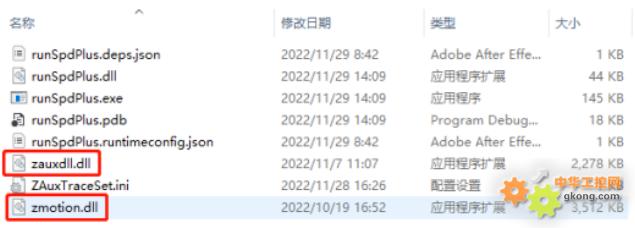
“‘x64ΈΣάΐΘ§“zauxdll.dll”Θ§“zmotion.dll”Ζ≈‘Ύbin->x64->Debug->net6.0-windowsΓΘ
3.œύΙΊΙΠΡήΩΣΖΔΘ® LOCALΗΏΥΌΫ”ΩΎ≤β ‘ Θ§ ÷α≤Έ ΐΕΝ»Γ Θ§ δ»κΩΎΉ¥Χ§Φύ ” Θ©
œύΙΊPCΚ· ΐΫι…ή

Θ®1Θ©’“ΒΫ–η“Σ”ΟΒΫΒΡ¥ΑΧεΉιΦΰΫγΟφΓΘ
Θ®2Θ© Ι”Ο“Label” ΉιΦΰΉςΈΣΉ¥Χ§œ‘ ΨΜρΤδΥϋΈΡ±Ψ”κ ΐΨίΒΡœ‘ ΨΘ§”Ο“Button” ΉιΦΰά¥¥ΞΖΔœύΙΊΒΡΚ· ΐΘ§ΆœΕ·Ήσ≤ύΙΛΨΏœδ÷–Ε‘”ΠΒΡΉιΦΰΒΫΫγΟφ÷–Θ§≤Δ«“Ϋχ–– τ–‘ΜρΕ·ΉςΒΡ≈δ÷ΟΦ¥Ω…ΓΘ
Θ®3Θ©Ήν÷’ΒΡΫγΟφ–ßΙϊΆΦ»γœ¬ΓΘ

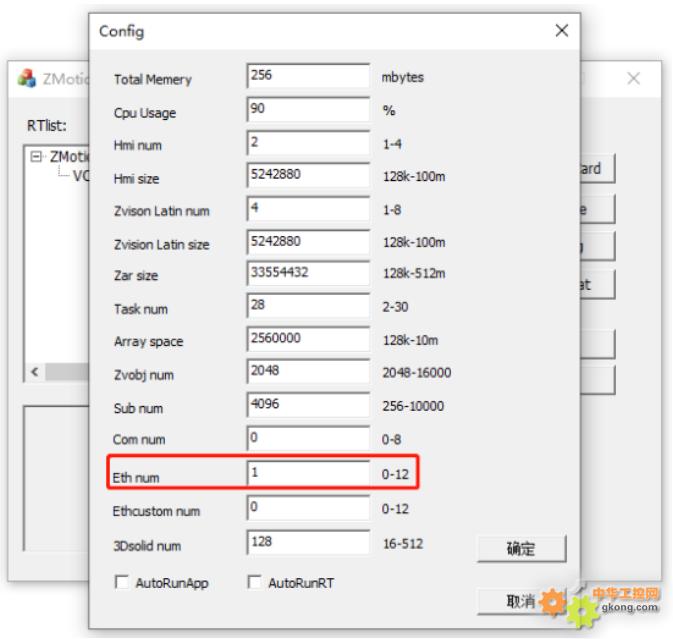
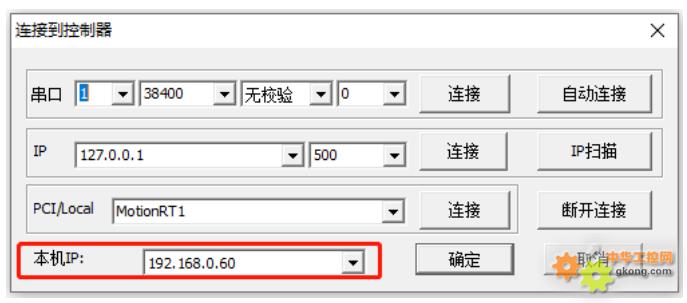
ΉΔΘΚ Ι”ΟIPΡΘ ΫΝ§Ϋ”MotionRT7ΒΡ ±ΚρΘ§“ΣΫΪMotionRT710÷–ΒΡConfig≈δ÷ΟœνEth numΒΡ÷Β…η÷ΟΈΣ“ΜΗω¥σ”Ύ0ΒΡ ΐΘ®1-12Θ©Θ§ δ»κΒΡipΈΣ±ΨΜζipΘ§Ω…“‘‘ΎZDevelop÷–÷±Ϋ”≤ιΩ¥ΓΘ
4.œύΙΊ¥ζ¬κ
Θ®1Θ©Ά®ΙΐIPΝ¥Ϋ”ΖΫ ΫΒΡΝ¥Ϋ”Α¥≈ΞΒΡ ¬Φΰ¥ΠάμΚ· ΐά¥Ν§Ϋ”ΩΊ÷ΤΤςΘ®IPΝ¥Ϋ”ΖΫ ΫΘ©ΓΘ
private void IPConct(object sender, EventArgs e)
{
//ΙΊ±’ΩΊ÷ΤΩΊ÷ΤΤςΘ§±Θ÷ΛhandleΈΣΩ’
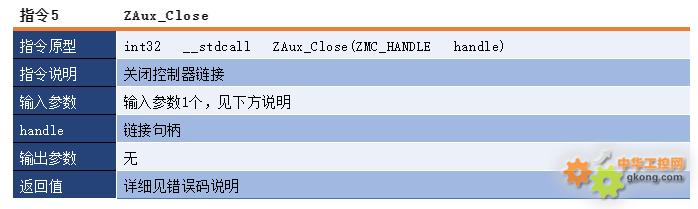
zmcaux.ZAux_Close(handle);
//ΆχΩΎΖΫ ΫΝ§Ϋ”
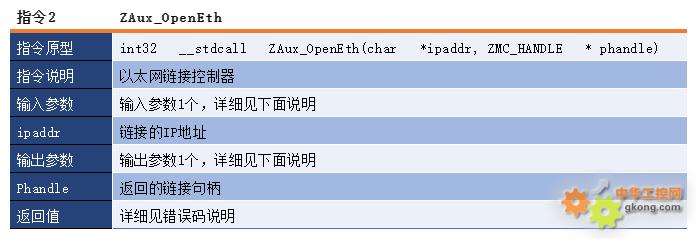
int ret = zmcaux.ZAux_OpenEth(textBox1.Text, out handle);
if(ret==0)
{
label2.Text = "“―Ν¥Ϋ”" + textBox1.Text;
label2.BackColor = Color.Green;
}
else
{
MessageBox.Show("Ν¥Ϋ” ßΑήΘ§«κ δ»κ’ΐ»ΖΒΡipΘΓ");
}
}
Θ®2Θ© Ά®ΙΐIPΝ¥Ϋ”ΖΫ ΫΒΡΕœΩΣΑ¥≈ΞΒΡ ¬Φΰ¥ΠάμΚ· ΐά¥ΕœΩΣΩΊ÷ΤΤςΘ§Ε‘”ΠIPΝ¥Ϋ”ΖΫ ΫΒΡΫγΟφœ‘ ΨΓΘ
private void IPDisConct(object sender, EventArgs e)
{
//IPDisConctΚ· ΐ”Ο”ΎΕœΩΣΩΊ÷ΤΤςΒΡΝ§Ϋ”Θ§Ε‘”ΠΆχΩΎΝ§Ϋ”ΖΫ Ϋ
zmcaux.ZAux_Close(handle);
label2.Text = "Έ¥Ν¥Ϋ”";
label2.BackColor= Color.IndianRed; ;
}
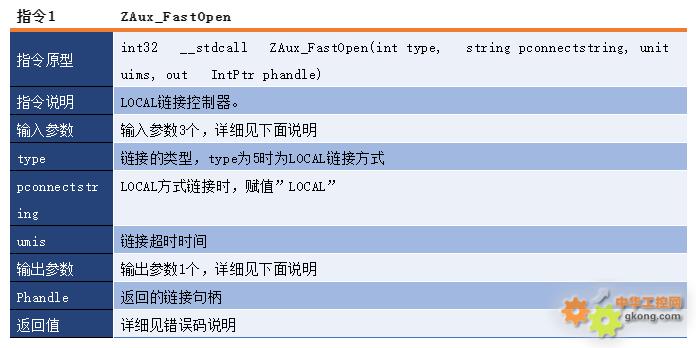
Θ®3Θ© Ά®ΙΐLOCALΝ¥Ϋ”ΖΫ ΫΒΡΝ¥Ϋ”Α¥≈ΞΒΡ ¬Φΰ¥ΠάμΚ· ΐά¥Ν§Ϋ”ΩΊ÷ΤΤςΓΘ
private void localConct(object sender, EventArgs e)
{
//LOCALΖΫ ΫΝ§Ϋ”
int ret = zmcaux.ZAux_FastOpen(5,comboBox2.Text,1000,out handle); if (ret == 0)
{
label5.Text = "“―Ν¥Ϋ”" + comboBox2.Text;
label5.BackColor = Color.Green;
}
else
{
MessageBox.Show("Ν¥Ϋ” ßΑήΘ§«κ―Γ‘ώ’ΐ»ΖΒΡLOCALΘΓ");
}
}
Θ®4Θ© Ά®ΙΐLOCALΝ¥Ϋ”ΖΫ ΫΒΡΕœΩΣΑ¥≈ΞΒΡ ¬Φΰ¥ΠάμΚ· ΐά¥ΕœΩΣΩΊ÷ΤΤςΘ§Ε‘”ΠLOCALΝ¥Ϋ”ΖΫ ΫΒΡΫγΟφœ‘ ΨΓΘ
private void localDisConct(object sender, EventArgs e)
{
//IPDisConctΚ· ΐ”Ο”ΎΕœΩΣΩΊ÷ΤΤςΒΡΝ§Ϋ”Θ§Ε‘”ΠLOCALΝ§Ϋ”ΖΫ Ϋ
zmcaux.ZAux_Close(handle);
label5.Text = "Έ¥Ν¥Ϋ”";
label5.BackColor = Color.IndianRed; ;
}
Θ®5Θ© Ά®ΙΐΒΞΧθ÷ΗΝνΫΜΜΞ÷ήΤΎΒΡ≤β ‘Α¥≈ΞΒΡ ¬Φΰ¥ΠάμΚ· ΐά¥ΦΤΥψΒΞΧθ÷ΗΝνΒΡΫΜΜΞ÷ήΤΎΚΆΉήΚΡ ±ΓΘ
private void run(object sender, EventArgs e)
{
//runΚ· ΐ”Ο”Ύ≤β ‘ΒΞΧθ÷ΗΝνΫΜΜΞ÷ήΤΎ”κΉήΚΡ ±
float dpos = 0;
// beforeDTΦ«¬ΦΫΜΜΞ÷ΗΝν«ΑΒΡ ±ΩΧ
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < Convert.ToInt32(comboBox3.Text); i++)
{
//Ϋχ––n¥ΈΒΞ÷ΗΝνΫΜΜΞ
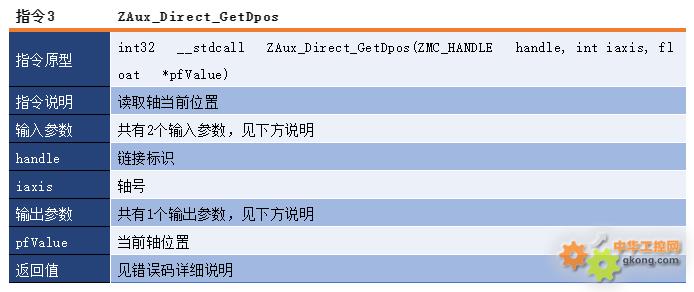
zmcaux.ZAux_Direct_GetDpos(handle, 0, ref dpos);
}
//afterDTΦ«¬ΦΫΜΜΞ÷ΗΝν«ΑΒΡ ±ΩΧ
DateTime afterDT = System.DateTime.Now;
//ΦΤΥψbeforeDT”κafterDTΒΡ ±Φδ≤ν
TimeSpan ts = afterDT - beforeDT;
//ΫΪtsΉΣΜΜ≥…ms≤Δœ‘ ΨΘ®ΉήΚΡ ±Θ©
label11.Text = (ts.TotalMilliseconds).ToString();
//ΦΤΥψΒΞΧθ÷ΗΝνΫΜΜΞ÷ήΤΎ≤Δœ‘ Ψ
label8.Text = ((ts.TotalMilliseconds * 1000) /(Convert.ToInt32(comboBox3.Text))).ToString();
label14.Text = dpos.ToString();
}
Θ®6Θ© Ά®ΙΐΕύΧθ÷ΗΝνΫΜΜΞ÷ήΤΎΒΡ≤β ‘Α¥≈ΞΒΡ ¬Φΰ¥ΠάμΚ· ΐά¥ΦΤΥψΕύΧθ÷ΗΝνΒΡΫΜΜΞ÷ήΤΎΚΆΉήΚΡ ±ΓΘ
private void runMuch(object sender, EventArgs e)
{
int []status = {0, 0 , 0 ,0};
float []dpos = { 0, 0, 0, 0 };
uint []num = { 0, 0, 0, 0 };
string cmd;
int star = 0;
StringBuilder cmdBuff = new StringBuilder(2048);
string[] tmp = new string[12];
cmd = "?dpos(0),dpos(1),dpos(2),dpos(3),axisstatus(0),axisstatus(1),axisstatus(2),axisstatus(3),in(0),in(1),in(2),in(3)";
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < Convert.ToInt32(comboBox3.Text); i++)
{
zmcaux.ZAux_Execute(handle, cmd, cmdBuff, 2048);
}
DateTime afterDT = System.DateTime.Now;
TimeSpan ts = afterDT - beforeDT;
label23.Text = (ts.TotalMilliseconds).ToString();
label16.Text = ((ts.TotalMilliseconds * 1000) / (Convert.ToInt32(comboBox3.Text))).ToString();
string s = cmdBuff.ToString();
string[] arrS = new string[20];
for(int i = 0;i<s.Length;i++)
{
if (s[i]!=9) //9 «÷Τ±μΖϊ’\t’ΒΡASCII¬κ
{
arrS[star] += s[i];
}
else
{
star++;
continue;
}
}
}
5. ‘Υ–––ßΙϊ



6.–ßΙϊ―ί Ψ
7.Ζ÷Έω”κΫα¬έ
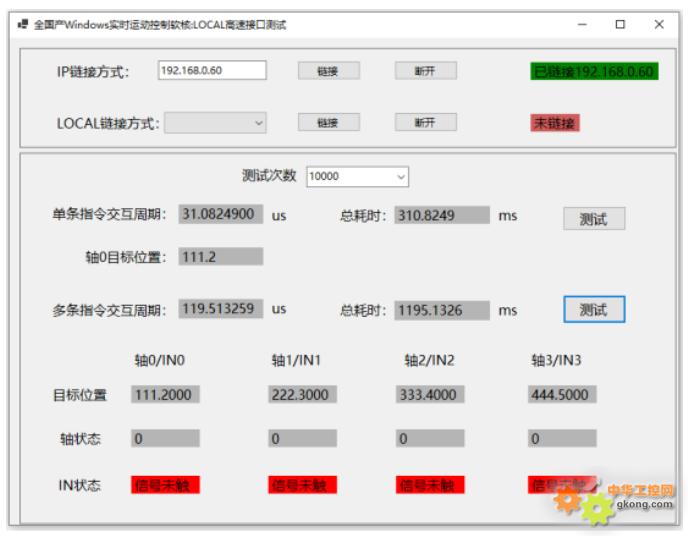
“‘…œΖ÷±π «Ε‘IPΖΫ ΫΝ¥Ϋ”MotionRT7”κLOCALΖΫ ΫΝ¥Ϋ”MotionRT7ΒΡ÷ΗΝνΫΜΜΞ≤β ‘Θ§¥”…œΟφΒΡ‘Υ–––ßΙϊΆΦΒΡ ΐΨίœ‘ Ψά¥Ω¥Θ§Ω…“‘Ω¥≥ωΒ±Ϋχ–– 1w¥Έ ΚΆΫχ–– 10w¥Έ ΒΡΒΞ÷ΗΝνΫΜΜΞΜρΕύ÷ΗΝνΫΜΜΞΒΡ ±ΚρΘ§LOCALΝ¥Ϋ”ΒΡΖΫ ΫΫχ––÷ΗΝνΫΜΜΞΥυ–η“ΣΒΡΒΞΧθ÷ΗΝνΫΜΜΞ ±ΦδΘ® ΤΫΨυ5usΉσ”“ Θ©Θ§“Μ¥Έ–‘ΕΝ»Γ12ΗωΉ¥Χ§ΒΡΕύΧθ÷ΗΝνΫΜΜΞ ±ΦδΘ® ΤΫΨυ18usΉσ”“ Θ©ΕΦ «“Σ±»IPΝ¥Ϋ”ΒΡΖΫ ΫΗϋΩλΘ® ΤΫΨυ31usΉσ”“”κ119usΉσ”“ Θ©ΓΘ
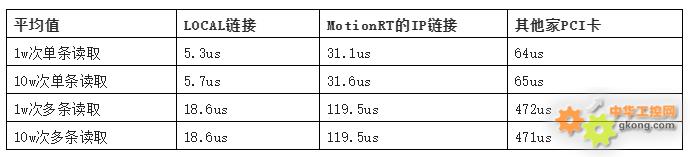
Τδ¥ΈΘ§Έ“Ο«Ω…“‘¥”‘Υ––ΫαΙϊΩ¥≥ωMotionRT7‘ΎLOCALΝ¥Ϋ”ΒΡΖΫ Ϋœ¬Θ§÷ΗΝνΫΜΜΞΒΡ–ß¬ “≤ «Ζ«≥ΘΒΊΈ»Ε®Θ§Β±≤β ‘ ΐΝΩ¥”1w‘ωΦ”ΒΫ10w ±Θ§ΒΞΧθ÷ΗΝνΫΜΜΞ ±Φδ”κΕύΧθ÷ΗΝνΫΜΜΞ ±Φδ≤®Ε·≤Μ¥σΘ§’βΫΪΈΣΙΛ“’Ής“Β÷–Έ»Ε®–‘ΧαΙ©ΝΥΦΪ¥σΒΡ±Θ÷ΛΓΘ
MotionRT7ΒΡ≥ωœ÷Θ§ΈόΖ« «“Μ¥Έ÷Ί¥σΒΡΨΣœ≤”κ…ΐΦΕΘ§ΥϋΈΣΈ“Ο«‘ΎΫχ––¥σ≈ζΝΩ÷ΗΝνΫΜΜΞΒΡΙΐ≥Χ÷–Θ§ΧαΙ©ΝΥΗϋΚΟΒΡ–ß¬ ”κΈ»Ε®–‘Θ§Ηχ…ζ≤ζ¥¥‘λΗϋΗΏΒΡ–ß¬ ”κΗϋΕύΒΡΦέ÷ΒΘΓ
œύΙΊΒΡΚ· ΐ«κ≤Έ’’“ZMotion PCΚ· ΐΩβ±ύ≥Χ ÷≤α”ΓΘ

±Ψ¥ΈΘ§’ΐ‘ΥΕ·ΦΦ θ Windows Β ±‘ΥΕ·ΩΊ÷Τ»μΚΥΘ®“ΜΘ©ΘΚLOCALΗΏΥΌΫ”ΩΎ≤β ‘÷°C# Θ§ΨΆΖ÷œμΒΫ’βάοΓΘ
ΗϋΕύΨΪ≤ ΡΎ»ί«κΙΊΉΔ“ ’ΐ‘ΥΕ·–Γ÷ζ ÷ ”ΙΪ÷ΎΚ≈Θ§–η“ΣœύΙΊΩΣΖΔΜΖΨ≥”κάΐ≥Χ¥ζ¬κΘ§«κΉ…―·’ΐ‘ΥΕ·ΦΦ θœζ έΙΛ≥Χ ΠΘΚ400-089-8936ΓΘ
±ΨΈΡ”…’ΐ‘ΥΕ·ΦΦ θ‘≠¥¥Θ§ΜΕ”≠¥σΦ“ΉΣ‘ΊΘ§Ι≤Ά§―ßœΑΘ§“ΜΤπΧαΗΏ÷–Ιζ÷«Ρή÷Τ‘λΥ°ΤΫΓΘΈΡ’¬Αφ»®Ιι’ΐ‘ΥΕ·ΦΦ θΥυ”–Θ§»γ”–ΉΣ‘Ί«κΉΔΟςΈΡ’¬ά¥‘¥ΓΘ
|

