1 系统方案设计
配电房室内挂轨式巡检机器人系统以巡检机器人为核心,集移动视频巡检、红外测温、环境监控、数据智能分析等功能于一体,实现对巡检区域设备的实时监控、数据分析管理。巡检机器人的配置为巡检机器人本体、智能终端监控软件、轨道及其他辅助设施。

系统架构
2 本地监控后台
本地监控后台作为巡检机器人系统的中心,主要由实时监控模块、数据统计模块、报表系统、地图编辑模块、任务管理模块、系统设置模块和系统集成模块等组成;除了能控制机器人执行相关巡逻任务外,还应具有数据采集、储存、统计、检索、报表、智能分析等多种功能。
3 远程集控后台
多个本地监控后台,对多个管道智能巡检机器人进行控制及相关数据分析,对所辖管道进行更高层次的综合控制和管理。
(1)轨道系统:挂轨机器人采用自动行走的悬挂轨道式设计,轨道竖向尺寸小,整体安装尺寸需求空间小,在满足机器人顺畅通行的前提下,增加了耐磨性。
(2)通信系统:挂轨机器人采用PLC通信系统(兼容无线WiFi)与整套控制系统通信。通信系统为机器人提供不小于50 Mbps有效网络带宽,可以保证巡检机器人系统所有的控制信号、视频数据、音频数据及报警信息等各类数据实时可靠传输。
(3)供电系统:挂轨机器人采用滑触线的方式进行取电,滑触线安装在铝型材轨道上,供电系统直接从主电气室取电,机器人供电模块采用滤波技术,滤除外界电网的高频脉冲对电源的干扰,使机器人获得稳定的电源。
(4)导航定位方式:挂轨机器人在运动过程中通过激光条码扫描、伺服电机里程码盘(脉冲)和RFID结合的方式进行定位和路径校核,RFID定位辅助纠错系统,能够将室内定位精度提高到3 cm以内,保证智能巡检机器人和远程中心可以实时了解机器人的位置信息。
4 硬件配置
在配电房布置1套挂轨式智能巡检机器人系统。配电房现场地面距房顶距离6 m,因层高较高,采用现场加装龙门架作为轨道的支撑,现场采用轨道巡检路径。
配电房巡检机器人具有电机驱控制系统、云台导航定位避障模块可见光摄像机、红外热成仪、视频服务器音编解码工业无线等基本硬件功能模块,此外增加了环境监测模块、应急广播及声光告警模块。
挂轨式巡检机器人配置具体包括:LED补光灯、可见光摄像机、防撞雷达、热成像仪、环境检测模块、行走机构、升降机构、检测机构、扬声器、状态灯、云台(支持云台水平360°旋转)。

5 软件配置
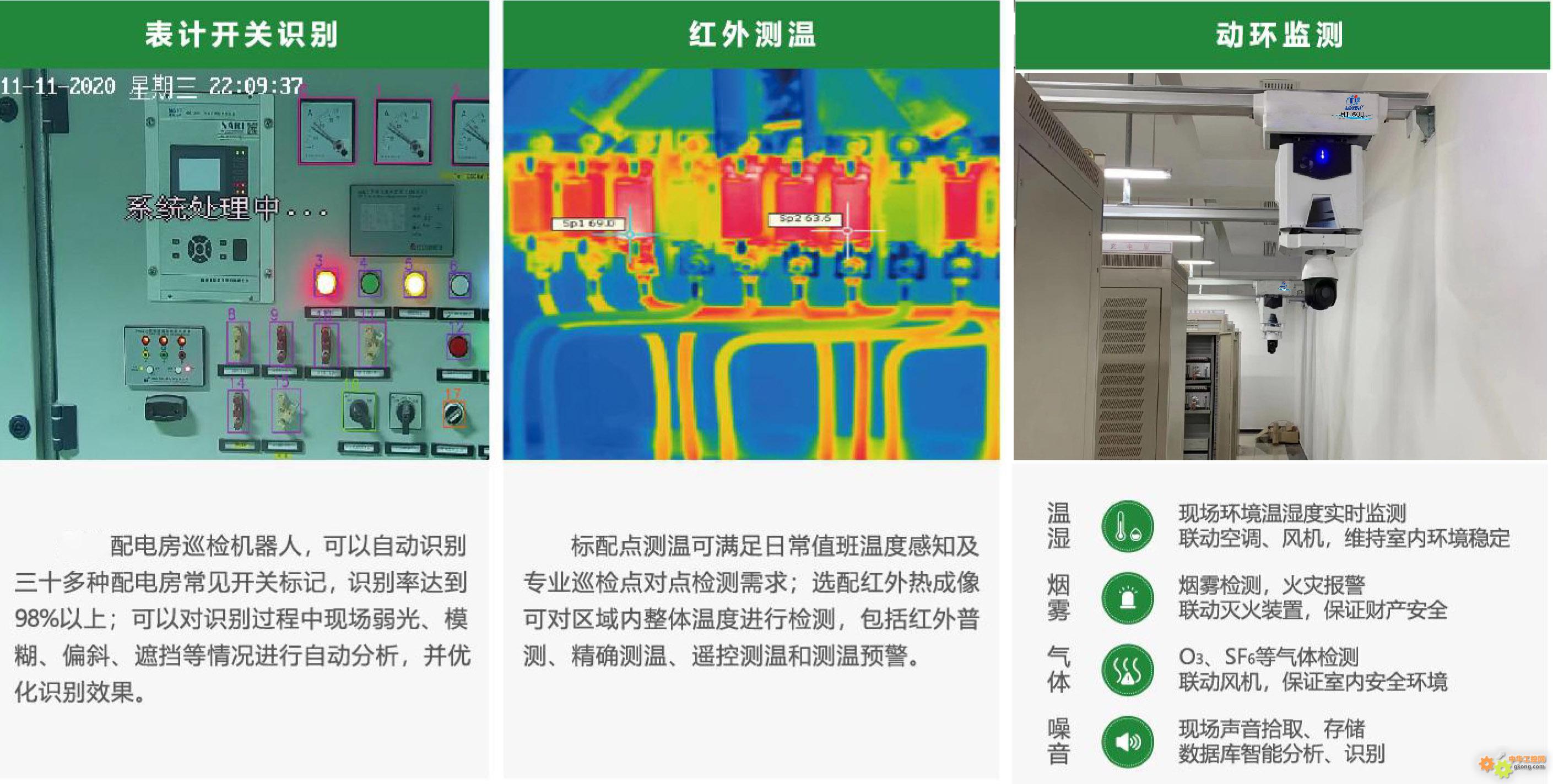
(1)视频识别。挂轨机器人视频识别是室内挂轨式巡检机器人系统的核心功能之一,通过机器人自身携带的可见光摄像机,完成视频图像的数据采集,通过高精度图像识别算法,对视频数据进行智能分析处理,识别视频内容。
(2)红外测温。挂轨机器人利用自身携带的红外热成像仪对室内电力设备温度数据进行采集、分析,进而诊断出致热型设备故障及热缺陷,触发相应报警。巡检任务执行完成后会自动生成任务报表,对设备温度进行有效的诊断。
(3)环境检测。挂轨机器人携带的环境监测模块,能够监测环境中的有害气体、温度、湿度、烟雾等环境信息。实时将采集的环境信息传输到控制中心,当监测到有害气体超标时,系统将进行报警,以提示运维人员及时处理。
(4)音频采集。挂轨机器人本体搭载高灵敏度的拾音器,并随云台一同转动,定向采集电力设备的音频信息。机器人采用国际领先的音频降噪算法和声音识别技术,增强音频信息识别的准确性和可靠性。音频数据经过软件压缩后传回服务器进行存储,可双向语音通话。
|

