一、机器人巡检与固定摄像头巡检的对比
目前人工巡检工作主要以查看表计,设备状态异常为主,从视觉检测功能来看,机器人和云台摄像头都能实现现场数据采集,但从效果和配置科学性来看,云台摄像头适合一两面柜子在一个单独的区间,如果一两排柜子都要检测,现场需要配置的摄像头则过多,且摄像头不具备上下升降的功能,数据表记读取可能会有失误。如果采用机器人,依靠机器人多自由度的运动优势,则可以实现正对被测表记进行精确检测的目的。同时,机器人具备局放/红外等摄像头不具备的功能。
|
序号
|
对比项
|
固定摄像头
|
机器人
|
备注
|
|
1
|
部署方式
|
壁挂或吊顶安装
|
铺设轨道安装
|
|
|
2
|
供电
|
AC24V供电
|
DC24V供电
|
|
|
3
|
功能
|
可见光视觉识别
|
可见光视觉识别,红外热成像测温,超声波+地电波局放检测,温湿度检测,噪音检测(支持选配)
|
|
|
4
|
应用场景
|
主变,GIS室等检测点分散但是重要的设备区域
|
开关柜数量较多,排列整齐的设备区域
|
|
|
5
|
特点
|
有针对性检测,灵活方便
|
开关柜等设备区域标准化建设,功能全面,一机一室,后期可拓展性强
|
|
二、配电站室智能巡检机器人系统架构
配电站室智能巡检机器人系统主要由四大部分组成:终端层、网络层、算法层和平台层:
终端层:采用轨道式巡检机器人,用于执行设定任务,监测设备状运行态并反馈相关信息;
网络层:提供整体的网络通信,支持WIFI/4G/5G传输;
AI算法层:提供算法支撑,对巡检机器人采集的数据进行智能识别,
平台层:数据通过通信网络将巡检数据传至平台层,并且平台数据支持和站内其他系统进行数据交互,实现需要数据接入,进行综合分析研判。

三、配电站室智能巡检机器人介绍
轨道式巡检机器人,采用自主或遥控方式,替代人工对开关柜运行状态进行监测,并实时监测站内环境重要指标数据,建立统一的监测平台和监测数据的共享。采用智能化的数据处理,可以对巡检数据进行对比和趋势分析,及时发现配电站室里面的设备和环境中存在的事故隐患和故障先兆,提高配电室的数字化程度和全方位监测的自动化水平,确保设备安全可靠运行,提升巡检管理水平以及巡检过程的可控性。

轨道式巡检机器人本体由几个部分组成:运行轨道、运动机构和仪器舱。
运行轨道:机器人的行走和供电载体。首先根据现场需求设计运行轨道,方便机器人在轨道上按照指定路径行走。同时,在轨道上铺设滑触线为机器人供电。
运动机构:其通过内部横向运动控制系统可以在固定轨道上横向运动,采用激光条码定位技术实现设备的精准定位。纵向运动系统可控制机器人仪器舱通过碳纤维伸缩纵向运动,采用编码器定位技术实现精度的纵向定位,从而实现巡检机器人仪器舱对开关柜自上而下的全覆盖巡视。
仪器舱:对开关柜运行状态数据采集和数据分析,其中包括视频监控、局放监测、红外测温、环境监测等。
四、配电站室智能巡检机器人功能介绍
4.1运动功能
机器人为了完成对配电站室内所有区域的开关柜体检测,可通过预设的机器人运行路径规划巡检逻辑和任务,实现机器人自主定位运动,采用激光扫码定位技术,通过公司自主研发验证的核心算法进行规划,保障运行的平滑性和重复定位精度。
4.2日常例行巡检
例行巡检是配电室日常运维工作中最常见的工作。内容包括设备的外观检查、声音判断、油位和各类表计检查、红外测温、开关闸刀状态判断、局放检测等。
4.3表计抄录
巡检机器人可以自动完成配电站室内表计数据的读取工作,并将结果自动生成巡视报表。它通过自身搭载的高清可见光摄像机,配合全向旋转云台实时捕捉变电所内表计设备的高清图像,采用智能识别技术对图像数据进行算法处理,可实现全天候对配电站室内指针类、数字类、行程类、分合指示类等所有表计的自动识别功能,表计的读数精度与人工相比误差不超过3%。

4.4局放检测(选配)
当开关柜本地中如出现绝缘条件不能满足运行要求时,将会出现局部放电情况,局部放电在开关柜内发现生不易被发现,如设备长期存在局部放电时,将对柜体的绝缘状态和运维人员的安全带来较大的隐患。因此,在高压设备中,由于局部放电引起的设备故障较多。

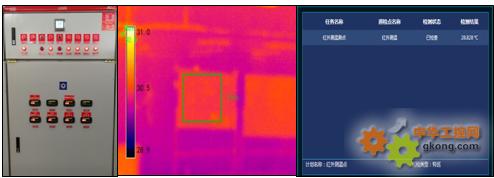
4.5红外测温
机器人红外普测,是通过预先设置多个检测点,随时由运维人员设置红外普测任务,对全站设备进行整体性扫描式温度采集,并有效避免区域设备被遗漏。同时对存在重要或紧急缺陷的设备进行定期的监视。智能巡检机器人将每日保存测温照片,跟踪数据发展变化,形成报表,如发现明显突变的情况,运维人员将收到提示信息进行人工核对。
4.6报表统计
巡检机器人可对设备进行自动跟踪、实时监控。运维人员远方通过客户端选择相应设备,设置巡检任务,选择相应周期进行跟踪重复巡视。或控制机器人定点全天监视,来实现运行设备的数据实时采集,减轻运维人员工作量。

五、配电站室智能巡检机器人安装
根据现场勘测设计出导轨安装的平面图,尺寸长度,选择好需要安装吊挂件的数量和位置,测量下顶部到地面的高度,计算出需要吊挂件的长度,确保导轨安全平稳。导轨需要按照现场开关柜的总长来确定长度,正常开始标准的每段长度是3米(可以互相连接)。按照之前考察的现场条件确定需要的材料,检查安装时候提供的所有材料,确保材料没问题。
- 按照之前考察的,和图纸上提供的位置安装吊挂件。
- 在依次将导轨安装到吊挂件上面固定,同时在安装之前确定孔位并打孔。
- 靠导轨的最下面张贴条形码,确保条形码水平整齐。
- 贴好条形码后安装滑触线。
- 安装稳压电源模块并接入电源。
|
站室施工工量统计
|
|
序号
|
流程步骤
|
工作内容
|
人员
|
实施时间
|
备注
|
|
1
|
材料进站
|
准备施工材料并进站。
|
2
|
1天
|
施工队
|
|
2
|
轨道安装
|
开关室内的轨道基础设施安装
|
5
|
3天
|
施工队
|
|
3
|
机器人调试
|
机器人任务点调试、试运行。
|
1
|
3天
|
厂家调试
|
|
4
|
平台调试
|
无人值守巡检系统调试。
|
2
|
1天
|
厂家调试
|
六、配电站室智能巡检机器人方案价值
智慧变电站室内无人值守系统在各变电站场景推广使用后,能有效提高工作效率,降低工作成本,加强作业安全性,并具有可观的经济效益.
6.1 业务提升
(1)提升业务效率
提升感知准确性,改善业务运作效率,优化业务和决策过程。
(2)创造业务价值
人机协作,超越人类感知,使能价值转化。
(3)降低综合成本
机器换人,极致标准化实时预测,提升准确性,解放人力专注业务决策。
6.2效益提升
|
比较项
|
传统巡检
|
全自主智能巡检
|
|
巡检内容
|
观察整体环境、重要表计查看和异常记录、空气异味、运行噪声
|
所有表计智能识别、开关状态检测和关联测点分析、设备温度检测、局部放电检测、以及环境监测
|
|
报表展示
|
人工观察和必要时记录
|
后台自动生成报表
|
|
及时反应能力
|
无法及时处理情况
|
及时反应并告警
|
|
实时反馈
|
无法实时反馈
|
可实时查看现场情况和图像
|
|
数据分析
|
/
|
异常汇总、统计、分析
|
|
预测预警
|
/
|
基于时间的故障趋势预警,多维度数据的研判。
|
|
巡检效率
|
巡检数据受人工影响较大(熟悉程度、业务水平、工作经验、态度、责任心和精神状态)
|
客观性强、一致性高
|
|

