
Bumblebee X助力Taiga Robotics通过AI驱动的视觉技术实现矿业自动化
http://www.gkong.com 2025-07-30 13:35 来源:Bumblebee
在矿业机器人自动化的过程中,一次失败可能带来严重后果。恶劣的天气、崎岖的地形和重型机械共同构成了一个传统技术无法应对的环境,而在这个环境下,精准、可靠和耐用性显得尤为重要。
这正是Taiga Robotics所面临的现实,也是他们努力解决的难题。
Taiga Robotics成立于2018年,最初专注于搜索与救援业务,之后逐渐发展成为矿业、核能及轻工业领域的机器人控制与自动化解决方案提供商。其旗舰产品Synapse是一款低代码/无代码的机器人编程平台,内置AI功能,设计旨在简化现场复杂的自动化任务。
最近,Taiga Robotics解决了矿业中的一个重大难题——自主杆操作,他们采用了Teledyne IIS的Bumblebee® X立体相机。Taiga的解决方案结合了先进的机器人控制软件和高性能的立体视觉系统,能够在复杂的户外环境中准确理解和识别目标。
挑战:在恶劣地形中实现杆操作自动化
在矿业领域,钻杆操作是一项重复性高、风险大的任务,传统上完全依赖人工操作。要实现自动化,仅仅使用机器人臂是不够的,还需要在低纹理、光照变化大且常有振动的环境下提供精准的实时3D感知。
市面上的视觉系统无法满足这些要求。Taiga需要一款具备深度精度、适应恶劣环境、并兼容神经网络的立体相机,才能确保AI驱动的自动化系统在现场能够正常运行。
解决方案:Bumblebee X立体相机
经过对多个3D视觉方案的评估后,Taiga选择了Bumblebee X,这是一款专为机器人应用设计的坚固高分辨率立体视觉系统。

Taiga Robotics的自动化系统将Bumblebee X相机集成在一个机器人起重平台上,解决了现场部署中的各种挑战。
Taiga Robotics的首席运营官Ilija Jovanovic表示:“这款机器人相机对于矿业领域来说极为重要,因为环境的苛刻条件和设备的巨大规模一直以来都是我们面临的一大难题。”
为什么选择Bumblebee X?
宽立体基线:即便在超过2米的距离,也能提供精准的深度感知,这对大型采矿设备尤其关键。
坚固设计与校准保持:可以承受阳光、冲击和多尘环境的考验。
5GigE+PoE:提供可靠的高带宽以太网连接,并支持长距离电缆,相比USB系统,这具有显著优势。
为AI提供RGBD输出数据:立体图像数据直接输入Taiga的AI系统,用于物体识别和抓取点估计。
系统运行
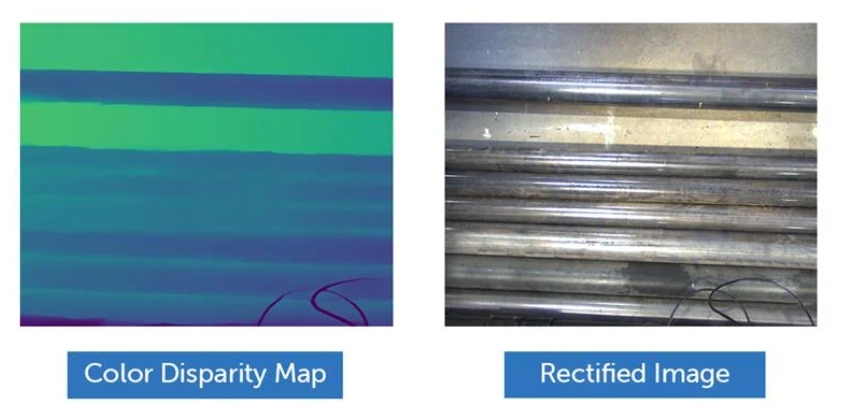
Bumblebee X提供的校正图像和深度图展示了自主操作钻杆的精确检测与深度估计。
在Taiga的杆操作系统中,核心部分是一台配备了Bumblebee X的机器人起重机。这款立体相机捕捉高分辨率的图像对,数据经过神经网络处理后,执行以下任务:
识别散落在地面上的钻杆
估算抓取点和最佳拾取位置
触发机器人臂的自主运动规划和控制
整个视觉和控制系统在一台坚固的AMD V1806边缘AI计算平台上运行,相机通过一根5米长的以太网电缆与PoE(以太网供电)与平台连接。Taiga的Synapse平台借助Spinnaker SDK和基于ROS的处理流畅来协调系统,确保机器人能够自主、稳定地运行。并且,整个过程无需编写代码。
通过Synapse与Bumblebee X的结合,Taiga Robotics能够为矿业客户部署现成的自主机器人系统。这些系统有效降低了安全风险,提高了生产效率,并为大规模工业任务带来了卓越的精度表现。
凭借Teledyne的立体视觉技术,Taiga Robotics成功将矿业中极具挑战性的人工操作作转变为AI驱动的自动化任务,充分展示了AI技术在工业领域的巨大潜力。

Taiga视觉引导机器人系统运行的简短演示
编辑精选
工控原创
- ▪ 春启智造新篇!2026年3月工业自动化资讯全览
- ▪ 当AI跨越虚实鸿沟,西门子如何在物理世界重写工业规则?
- ▪ 会造成工控系统失控等安全风险!工信部旗下单位发布工业领域OpenClaw应用风险通报
- ▪ ABB机器人携手英伟达 加速工业级物理AI规模化落地
- ▪ 舍弗勒宣布乐聚为首个中国具身智能合作伙伴,人形机器人走向全球产业协同
- ▪ 营收首破400亿欧元大关 施耐德电气2025财年交出强劲业绩
- ▪ 高效电机市场强劲复苏,2030年规模预计翻番至31亿美元
- ▪ 美的剥离伺服资产,聚焦核心部件突围
- ▪ 六十载创新积淀,ADI开启边缘智能新篇章
- ▪ “不拥抱就下岗”!朱兴明定调汇川技术2026年:全员AI化


