ժҪ�����Ľ�����S120��������ͬ������ڵ����е�Ӧ�ã������˵��ݿ���ϵͳ����ɼ��ص㣬S120��������ͬ��������ڵ��������ĵ��Է�������������ͬ�����ʹ��S120�����������õĶ���̬���ԣ�����ϵͳ��Ҫ����ʵ��Ӧ����ȡ�������õ�Ч����
�ؼ��ʣ�����ͬ����� S120 �������� ʸ��
Abstract: The application of permanent magnet synchronous motor drive by S120 in elevator is introduced in this paper, describes the composition and characteristics of the elevator control system, the debugging method for elevator lifting drive by S120. Elevator permanent magnet synchronous motor using the S120 driver has good dynamic and static characteristics, to meet the requirements of the system, and achieved good results in practical application.
Key Words: PMSM S120 Elevator drive Vector
һ����˾���
�������µ��ݹ�˾��˾��Ҫ���¸���˿͵��ݡ��۹���ݡ����ݡ��ػ����ݡ��������ݵ��з�����ơ����졢���ۡ���װ��ά�����רҵ���ִ�����ҵ��Ҳ�������ӹ�˾�ڵ�����ҵ��Ҫ��ս�Ժ�����顣���µ���һֱ����������һ������������ڲ��ϼ������£���Ϊ������ҵ�ھ��м����ȵ���ǿ��������ҵ���ͻ�ԭ��ʹ��������ʩ�͵µı�Ƶ��������������������ͬ��������ͻ�Ϊ�����������Ʒ�ľ�������ϣ��ʹ�������ӱ�Ƶ���������������������
����ϵͳ�Ĺ���ԭ������ɲ���
1��ϵͳ��ɲ���
������һ���Ե綯��Ϊ�����Ĵ�ֱ��������װ����״���գ����ڶ�㽨�����˻����˻��ҷ�������˷ֱ����Ž���Ͷ��أ�������ҷ���ֺ͵������ϣ�ҷ���綯��ͨ�����������ٺ����ҷ����ת������ҷ������ҷ����Ħ��������ǣ������ʵ�ֽ���Ͷ��ص������˶����ﵽ����Ŀ�ġ�
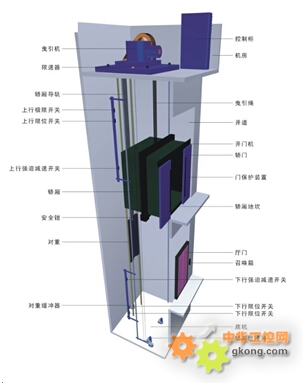
����ϵͳ��ɣ�
ҷ��ϵͳ��ҷ��ϵͳ����Ҫ����������봫�ݶ�����ʹ�������С�ҷ��ϵͳ��Ҫ��ҷ������ҷ����˿���������֣���������ɡ�
����ϵͳ������ϵͳ����Ҫ���������ƽ���Ͷ��صĻ���ɶȣ�ʹ����Ͷ���ֻ�����ŵ����������˶�������ϵͳ��Ҫ�ɵ��죬��ѥ�͵������ɡ�
������������ͳ˿ͺͻ���ĵ���������ǵ��ݵĹ������֡������ɽ���ܺͽ�������ɡ�
��ϵͳ����ϵͳ����Ҫ�����Ƿ�ס��վ��ںͽ�����ڡ���ϵͳ�ɽ����ţ����ţ����Ż�������װ����ɡ�
����ƽ��ϵͳ��ϵͳ����Ҫ���������ƽ������������ڵ��ݹ�������ʹ��������ؼ�������������֮�ڣ���֤���ݵ�ҷ������������ϵͳ��Ҫ�ɶ��غ���������װ����ɡ�
�����϶�ϵͳ�������϶�ϵͳ�Ĺ������ṩ������ʵ�е����ٶȿ��ơ������϶�ϵͳ��ҷ���綯��������ϵͳ���ٶȷ���װ�ã��綯������װ�õ���ɡ�
��������ϵͳ����������ϵͳ����Ҫ�����ǶԵ��ݵ�����ʵ�в��ݺͿ��ơ���������ϵͳ��Ҫ�ɲ���װ�ã�λ����ʾװ�ã�������(��)��ƽ��װ�ã�ѡ��������ɡ�
��ȫ����ϵͳ����֤���ݰ�ȫʹ�ã���ֹһ��Σ��������ȫ���¹ʷ������ɵ�������������ȫǯ��������������������ȫ���塢�������������ݰ�ȫ�������ݳ�������װ�á���λ����װ����ɡ�
������Ҫ���ܵ����϶�ϵͳ
2�������϶�ϵͳ
�����϶�ϵͳ��ҷ���綯��������ϵͳ���ٶȷ���װ�ã��綯������װ�õ���ɡ�
ҷ��ϵͳ��Ҫ��������ҷ�����ɷ�Ϊ�г���ҷ����������ҷ������
�г���ҷ�������ɵ綯�����ƶ����������䡢�̳�װ�ü���������ɣ�������ת���������ȱ������ƶ����պ�ȷ�Ͽ��ء�����װ�á���Ҫ����Ϊ�����ϸ˴���ҷ������
����ҷ�������ɵ綯�����ƶ������̳�װ�ü���������ɣ�������ת���������ȱ������ƶ����պ�ȷ�Ͽ��ء�����װ�á���Ҫ����Ϊ����ͬ������ҷ������


�г��ִ���ҷ���� ����ͬ������ҷ����
����ͬ���������������ҷ���������ڲ�������ҷ��������ʡȴ�˴�ͳ�������ϸ˼�������ʹ����������ͣ����г��ֲ�Ʒ�ɼ�С����10�ֱ����ϣ��������ͣ�����������Ⱦ�������ϻ���Ҫ������ͬ���綯��ת���ɸ����������幹�ɣ������ŵ�����������ߵ綯��������Ч�ܡ����������ϸ˵Ļ�е����Ч�ʱȽϵͣ���������ͬ����������ϵͳ�������ϸ˴���ϵͳ���и��ߵ�Ч�ʣ����͵������ܡ��ڰ�ȫ���棬��Ϊ��ṹ�����и���ֱ���ƶ����ص㣬���ṩȫʱ�����г��ٱ������ܵ�ͬʱ������������ͬ���綯���ķ�����ص㣬Ϊ����ϵͳ��˿��ṩ��㱣������Ӧ�÷��棬��Ϊ����ͬ��ҷ�������͵�С�ͻ������ͻ��ص㣬ʹ���������뽨��������Ͽռ�Ĵ����Դ��������Ϊ�������ʦ�ṩ����ĵ�����ƿռ䣬ͬʱҲ��ӵĸ������˶Խ�����ռ��ʹ������ʹ�������������г��������Ĵ�ֱ���ݶ�ʹ������ͬ��ҷ������
��Ϊ��������ͬ������ҷ��������ڴ�ͳ���г��ִ���ҷ�������ŵ㣬��Щ��������ͬ������ҷ�����ڵ�����ҵ�ƹ�ܿ졣Ŀǰ�������˵����У�����ҷ������ʹ�����Ѵ�60%���ң�����Ŀǰ�Ŀ��������Ϊ20��̨������ҷ��������������12��̨���ܲ�ֵ��20�����ҡ�
���������϶�ϵͳ���Ʒ���������
1�� ������������ص�ѡ��
����ҷ����ѡ�ý������µ�������˾��������������ͬ������ҷ������
��Ҫ���������ҷ����ֱ�� 400mm ����� 25.7A
��ٶ� 1.5m/s ����� 11.5Kw
����� 1150Kg �Ť�� 765N
���ѹ 380V ���ҷ�ʽ 2/1
�Ƶ�� 24Hz ������ S5 40%
ע�� S5������ �������ƶ��Ķ������ڹ����ƣ���һϵ����ͬ�Ĺ����������У�ÿһ���ڰ���һ����ʱ�䡢һ�κ㶨��������ʱ�䡢һ�ο��ٵ��ƶ�ʱ���һ�ζ���ͣתʱ�䡣
�������صļ��㣬������һ��ƽ���壬������Ӧѡ���Լ��������(����ƽ�����صij˿�)��������ȡ����綯��ʱ����ֻ��Ҫ������������صij˿��������ٴ��صij˿��½��Ķ����������������������ƽ�⡣���չ��ұ꣬���ֵ�����������40%-50%��غɵ��˵ĸ������������õ������Ӧ���Ƕ��ص��������ڽ����������������غ�40%-50%��������á���ȥ������������Ч����ռ��غɵı���Ҳ�е��ݵ�ƽ��ϵ�����������еĶ�ƽ��ϵ��ԼΪ45%�������ҷ�ʽΪ2/1����
��������ʱ�����Ť��M���ճ���10%�����㣬
M = (1.1-ψ) × QD1g/2r
= (1.1-0.45) × 1150 × 0.4 × 9.8/4
= 732N
ʽ�У�ҷ���� r=2, QΪ������������D1Ϊҷ����ֱ����D1=400mm�� ψΪƽ��ϵ����
ψ=0.45��
2�������϶�ϵͳ����
ҷ��������ϵͳ��Ҫ��
1����������ͬ�������ʵ�ֱջ�ʸ�����ơ�
2�����µ�������ͬ������ı�����Ϊ���º� ERN 1387������ʽ������ SIN/COS (1 Vpp) ��
3��Ҫ���Ƶ����Encoder Simulation TTL��� 5V ����źţ����ź���������ݿ��������ص���ʵ���ٶȡ�
4��Ϊ��֤���ݳ��������ԣ��ٶȻ��������ָ���ʵ���ٶ��л���
5����Ƶ����������Ƶ����Ҫ8KHz,�ﵽ���͵������������Ŀ�ġ�
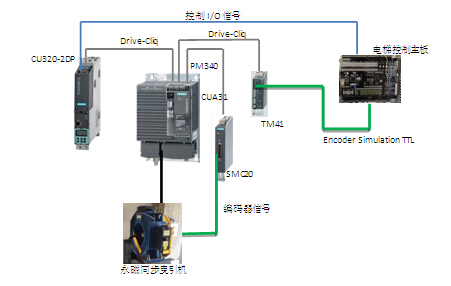
����������S120�����ṩ��������������
����1��S120 CU320-2DP+CUA31+PM340+TM41+SMC20
����2��S120 CU310-2DP+SMC20+PM340+�������ź�ת����
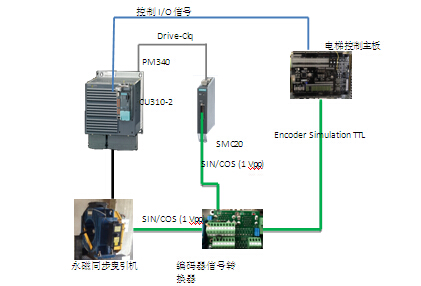
����1�У��������ṩ�����������϶�ϵͳ��S120Ϊ��ʵ�ֱ�Ƶ��TTLģ���źŵ������ѡ����TM41ѡ��������Ҫѡ��CU320-2DP��Ϊ��Ƶ���Ŀ��Ƶ�Ԫ������ڷ���1������2���ŵ���ҷ����������Ƶ���ṹ����ʵ���϶����ܵ�ͬʱ������ʡ��ҷ��ͬ����������ijɱ���ѡ���˿ɿ��ĵ�����������ת��������Ƶ��ֻ������������ͬ�����ʵ�ֱջ�ʸ���ٶȿ��ƣ�TTL���5V�ź�ͨ���������ź�ת����ֱ����������ݿ������壬���Լ�
3�������϶�ϵͳѡ��
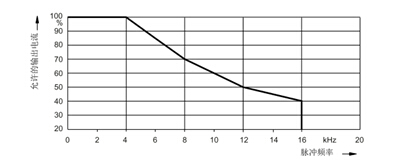
��Ϊ�ڵ�������ϵͳ�У����ڵ��ݵ�������ͬ��ҷ�������ݵ�����ҵ����ֱ���ṩ�����������������ٶȡ����ڱ�Ƶ������Ҫ��Ӧͬ��������ʵ�ѡ�����ع��ʣ��ͻ�ͨ�������ṩ�˱�Ƶ�����ʺ��ƶ����蹦�ʡ�����Ϊ�˴ﵽ���͵������������Ŀ����Ƶ������������Ƶ����Ҫ���ӵ�8KHz�������Ҫ����ʵ�ʱ�Ƶ������������Ƶ���������ɵ�����������ݡ�����Ƶ������������Ƶ����Ҫ���ӵ�8KHzʱ����Ƶ�������ij�������������ݵ����70%��
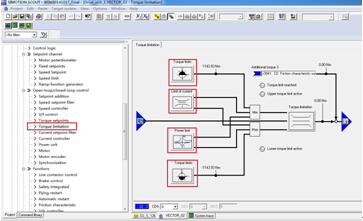
PM340ģ������ģ��Ľ�����������
FSA �� FSE �ͣ� “����Ƶ��-�������”����ͼ
�ͻ���Ҫѡ��������ƶ����裬��S120���ʵ�ԪPM340�ж��ƶ�������ֵ��Ҫ���ͻ�ѡ����ƶ���Ԫ��ֵ����С��PM340���ʵ�Ԫ��������С��ֵҪ�����ѡ����ƶ���Ԫ��ֵС�ڹ��ʵ�Ԫ��������ֵ���ᵼ��PM340���õ��ƶ���Ԫ��
4������������ͬ������ĵ��Լ��Ż�
�ż�λ��ʶ��
S120��������ͬ�������Ҫ���дż�λ��ʶ������ȷ��ͬ������ĵ����ż�λ�ã��ڴų������������Ҫ��λ�á����Զ��ڴ�δУ�������ĵ����ֻ��Ҫ����һ���Դż�λ��ʶ����ȽϿͻ�ԭ��ʹ��ʩ�͵�ATV71L, ��ΪATV71L���ܽ��������C, D�źţ�ÿ�α�Ƶ���ϵ��һ�����л��Զ�ִ�дż�λ��ʶ�𣬴Ӷ�������ݲ����ϴ���������˵��ݵ������ԣ�����������S120����������������ͬ�������������Ϊ���º�ERN1387�� ����C��D �źţ�����ֻ���ڵ��ݵ���ʱִ��һ�δż�λ��ʶ��֮�����в������ATV71L���������֤�˵������е������ԡ�
�ż�λ��ʶ����Ҫ���裺
1. ͨ�� p1980 ѡ��һ��ʶ��
2. ���� p1990 = 1������һ���Դż�λ��ʶ��
ʵ�ʵĴż�λ��ʶ����̣����������ת360�b
ʵ�ʴż�λ��ʶ��Ӧ�������²���������
ת���趨ֵ = 0 ��ֹ״̬
����ܹ�������ת����ֱ�����ѿ�
��բ���ã�
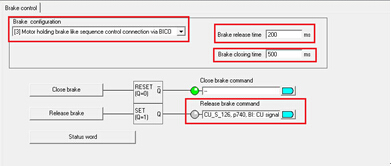
�����բ��������
P1215=3: �����բͬ˳����ƣ�ͨ�� BICO ���ӡ�P1216 �����բ��ʱ�䣬��բͨ���բ����ת��/ �ٶ��趨ֵ�ڸ�ʱ���ڱ���Ϊ�㣬֮��ʹ��ת��/ �ٶ��趨ֵ��P1217 �����բ�պ�ʱ��, ��ִ�� OFF1 �� OFF3������բ�ϵ磨�պϱ�բ���������ڸ�ʱ���Դ��ڱջ������У�ת��/�ٶ��趨ֵΪ�㣬�ڸ�ʱ�������ɾ�����塣������õıպ�ʱ���ʵ�ʱպ�ʱ��̣�����ܻ�ʹ���ػ��䣻������պ�ʱ�����̫���Ʊջ���ʩ�ӷ������ڱ�բ�ϣ����̱�բʹ��������
��բ����ʱ��
ת�����ƣ�
ת����ֵ�����������ת�أ���Ե���綯���кͻ����������ò�ͬ��ת����ֵ������ת�����ƣ��������ú������ƹ�ͬ��������Ҫȷ���趨�Ļ��������Ƿ��������������С�
ת������
��Ƶ�������ź��趨��
�������б�Ƶ���ٶȸ���ֵͨ��������ѡ��Ĺ̶�Ƶ�ʸ���ʵ�֡�
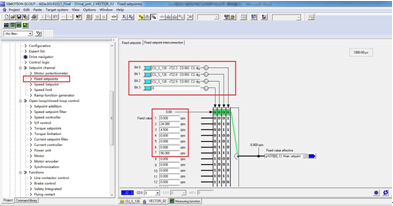
�̶�Ƶ�ʸ���������ѡ��
��Ƶ���Ĺ����ź�����ź����ӵ����ݿ������壬��Ϊ��ϵͳ�ϵ�ʱ�����ݵĿ�����������ʱ��ȱ�Ƶ��ʱ��Ҫ�̣�����Ƶ��û�����ã����ݿ���������ǰ������Ƶ�����п��ܻᵼ�����ⷢ����������Ҫ�����ź�����ź�ȡ�����͵����ݿ������塣����Ƶ�����Ƶ�Ԫ�������к���ܰѹ����ź�ȡ�����ͳ�ȥ�����Ա�Ƶ�����������е�����Żᷢ����1�źţ�����Ƶ���ϵ���߱�Ƶ������ʱ�����ݿ������岻�ܽ��յ������1�źţ�����Ϊ��Ƶ�����߱�������������������ϵͳ���������С�
�����������������ã�
Ϊ������˿ͳ�������ʱ�����Ե�Ҫ����Ҫͨ����չб�º�����������ת�ٿ�����������ʵ�֡�
��չ��б�������������ṩ����������ٹ����е���ʼԲ���ͽ���Բ����ʵ�����ٶȵ�ƽ�ȹ��ɣ��ڵ��������Ӽ��ٹ�����ʵ�ֱ���ٶȵĹ��ܣ��ڵ�������˲��Ϳ���ٵ�������ٶ�ʱ����С�˵������м��ٶȣ�����˵��ݳ�����������,�����˵��ݴӾ�ֹ״̬ͻȻ�����͵��ݼ��ٵ��趨�ٶ�ʱ�ij����
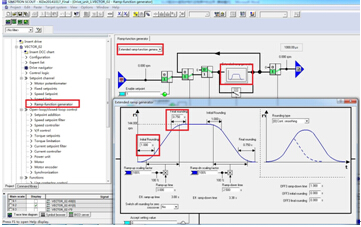
����ʼ�ͽ���Բ����б��������
�ٶȿ�����Kp_n/ Tn_n���䣬���ȵ�������ʱ����Ϊ�����Ǵ�ֱ�ᣬ��Ҫ�ϴ��Kp_n�ͽ�С��Tn_n���������ٶȱ��ʱ��Ϊ�˱�֤���ݵ������ԣ���Ҫ��С������еĶ�̬��Ӧ�����ٶȻ����Ա���������СKp_n������Tn_n���ٶȿ�����Kp_n/ Tn_n����ʵ���˸��ݵ��������ٶ��л��ٶȿ�����Kp_n/ Tn_n�Ĺ��ܡ�����ڻ��ڵ��������ٶ��л��ٶȿ�����KP_n/ Tn_n��S120�ٶȿ�����KP_n/ Tn_n���书�ܸ�����ʵ����Kp_n/ Tn_n��ƽ��������

�ٶȿ�����Kp_n/ Tn_n����
�����������Ż���
S120����ҷ��ͬ����������Ȳ��� P1910 ���е������ʶ�𣨾�̬������������ʱ���б�����ʶ��õ��ż����õ�P431�����ƫ�ƣ������븺�أ�ͨ��P1960ѡ��2�����д�����������ת���õ���ȷ�ı����������ߡ��ڵ��û�и�������������װû���ƶ���ǰ���£�����ֱ����P431��������֪�Ĵż������ƫ�ƣ�����Ҫ�������ż��DZ�ʶ��
����֮ǰ���Ż������������븺�أ�ҷ�������Ͻ�������أ�����֮ǰ�������ص�ѡ���ڽ�����õ�����£�ҷ��������Ч����ԼΪ����ص�50%�������ﵽ�˵������е�����أ������������У���������ڵ綯״̬�������ﳵ����S120������F7412������������dz����������ڽ��븺��֮ǰ��ν����˴ż�λ��ʶ�𣬵õ���P431�����ƫ�ƻ�����ͬ������ҷ���������ʱ�����������У����Կ����ų�����Ϊ�����ƫ�ƽǶȴ����ԭ�����ֲ����F7412�Ĺ���˵�����ᵽ�����ǿ��ƻ�·��Ϊ�����趨��������ȶ�����������ﳵʱ��Traceͼ�е��ٶȺ�Ť�صı仯�������ٶȻ�����Ӧ�ﲻ������Ҫ��ͨ��������KP_n�ͼ�СTn_n�����ݿ����������С�

KP_n, 2.5 Tn_n 60ms
KP_n, 11.5 Tn_n 2.5ms
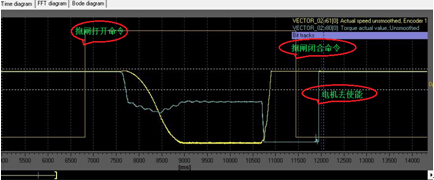
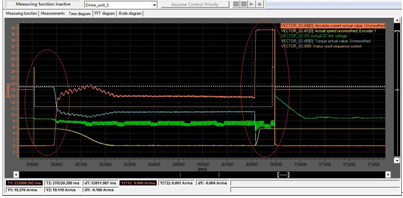
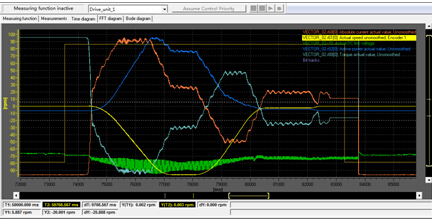
���й����У����ֵ��������ڼ���ģʽʱ������ÿ��ͣ����������ַdz���Ķ�ת�����������ﵽ�˱�Ƶ������������ʵ�����Ҳ�ǵ���ͣ��ʱ�����кܴ����ͨ���۲�Traceͼ�ĵ������ߺͱ�բ�պ���������������������ڱ�բ�պ��������֮ǰ���������б�Ƶ���ı�բ��������������������ݿ������壬Ȼ���ɵ��ݿ������巢����բ�ͱպ������Traceͼ�������˶�ת������������Ϊ���Կ������巢��ͣ���������ͨ�����TTL����źŵõ������ʵ���ٶȺ���Ʊ�բ��ʹ��բ�պ϶������ڱ�Ƶ���ı�բʱ���µ����ת��ͨ���ѱ�Ƶ�ı�բʱ��͵��ݿ�������ı�բʱ�����ƥ�䣬�����˴˶�ת������
������������ʱ��������ȵ����������ٶȣ����ݿ�������ͨ��¥������������ٶȰ������ߣ�������쵽��ָ��¥��ʱ���л�����������ʹ����ײ���¥����룬���ƽ�㶯�������ٶȿ�����Kp_n, 11.5��Tn_n��3ms���������4.5rpmʱ�������ٶ���ͨ��Traceͼ��������Ϊ�ڵ�������ʱKp_nƫ����ɵ��ת������Ϊ��������ʱ��Ҫ������и߶�̬��Ӧ���������Բ��ܴ���ȵļ�СKp_n������ͨ�������ļ�СKp_n���������е�Kp_n��С��10.8ʱ������ٶ���4.5rpm���ֵ��ٶ�����ʧ���������������������ڣ��ٶ�ƽ�ȡ�
Kp_n, 11.5 Tn_n 2.5ms

Kp_n, 10.8 Tn_n 2.5ms���������� �����������
Kp_n, 10.8 Tn_n 2.5ms���������� ����綯����
���ղ��Լ�������
��բ������:
Ϊ�˱�֤����ҷ������բϵͳ���������У������˱�բ�����ܡ�
�����ݴ��ڿ���ģʽʱ�����ݿ������������բ�����������ɱ�Ƶ����������һ���Ķ�ת���أ��ɵ��ݿ��ư���ҷ�����Ƿ���ִ���������д���Ϊ��բ������������ͣ�ã�������Ϊ����������
����ʵ�ַ���Ϊ��
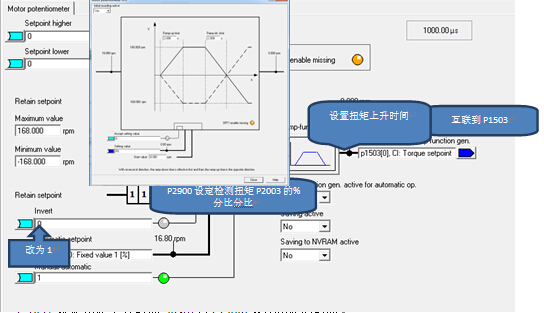
�ﳵ�Ż�
P2900 BICO ������P1042��P2900 �趨Ť�صİٷֱȣ���P2003�İٷֱȣ�
P1041 �ij�1���Զ�����
r1050 BICO ������P1503������Ť�ظ���
P1030 ��Ϊ 2 H��ȡ������б�µ�ƽ��
P1047 �趨Ť������ʱ��, 0Nm��P2003��ʾŤ�ص�ʱ��
P1501 BICO������ ��բ���Զ���
ͨ���IJ������ã�����MOP��б�·�������ʵ���˱�բ�����Ե�Ҫ��
����ʽ���ͣ��ȥ������
����ͬ���������ת�ӽṹһ��ɷ�Ϊ��ʽ��IPMSM��������ʽ(SPMSM)��
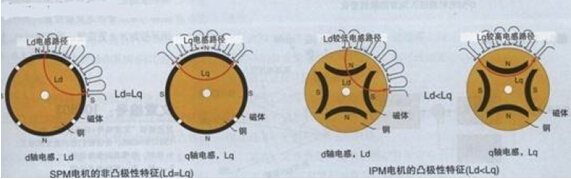
����IPMSM�������Ե���ЧӦ����ֱ�����뽻���в���ȣ�һ�㣩Ld < Lq
����SPMSMû����ЧӦ����Ld = Lq
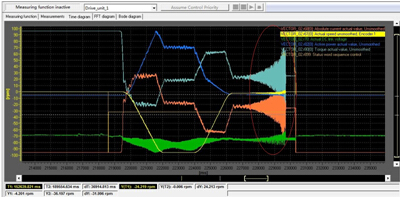
������ͬ��ҷ�����ڵ�����������Ӧ�ù����У���������ʽͬ�������ͣ��ʱ�ᷢ���б��ڱ�բ�պϵ�������Ӱ���˵��ݳ��������ʸС�
����ͼ�����ֳ���ص���ͣ��S120ȥʹ��˲�����ڵ������ͣ��ʱ��������3rpm���ٶ�������ٶ�������ͣ�������ij��֡�
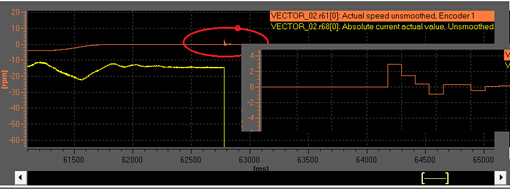
�������ͣ���ٶ�����
��������ͬ���������ת�ӽṹһ��ɷ�Ϊ��ʽ��IPMSM��������ʽ(SPMSM)����Ҫ��ͬ����Ld �� Lq����ȣ������Ƿ���Ϊȥʹ��ʱ����ͻȻ��Ϊ�㣬�����˵������
����Ϊ����֤����ͻ���Ƿ���ֱ��ԭ��������ͨ��DCC��̼����˵��ȥʹ��ʱ�ĵ���ͻ�䡣
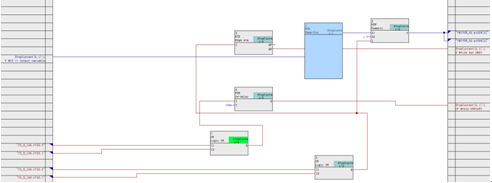
DCC����ͼ
ʵ�ֵ���Ҫԭ�����ڵ��ݿ������岻�������������Ƶ��ʱ������DCCб�º�����ͨ��Ť�����ķ�ʽʵ�ֵ����������б�»����½����ﵽ�������ͣ�������⡣����ͼ���Կ���������������б���½�ʱ������ٶ�û�г��ֶ�����
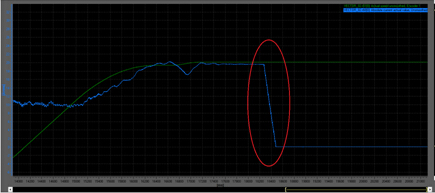
��ȥ�������ܵ�����ͣ������
�塢�����������
�˵��ݵ����϶�ϵͳ���ӵ��Խ��������Ѿ��ȶ�������һ��࣬��Ʒ���ܺ͵��ݳ������ʶȶ��õ��˿ͻ����Ͽɡ��ֳ�ʵ�ʵ�������̨��������ͬ����ҷ������ͨ���IJ������ã��Լ��Ż��ٶȻ�����Kp_n�ͻ���Tn_n������ʵ�ֿͻ�Ҫ�������,DCC��BICO���ܣ���������ϵͳ���ܵĿ���չ�ԡ�
����Ӧ�����
����������ǰ�ڣ����ֿ��Ʒ����ĶԱ��Ƿdz���Ҫ�ģ��������������Ҫ���ǰ���£�ѡ���Լ۱���ߵĿ��Ʒ�����������Dz�Ʒ�ľ�������
�ߡ��ο�����
(1) SIEMENS SINAMICS S120 �����ֲ� 01/2013
(2) SINAMICS S120 Function Manual Drive Functions 04/2014
(3) ����ͬ������ҷ����Ŀǰ״̬����չ���� ���ߣ����ij� ������

