|
西克应用
概述
本期小西为大家带来多云台3D扫描与点云数据融合在火车自动抽样系统的应用介绍。
西克的激光雷达以及3D云台,由于具有远距离大场景测量以及良好的室外环境适用性与抗干扰性能,在钢铁、化工、冶金、物流等多个行业都得到广泛的应用。

应用场景
火车自动抽样系统应用:在顶部有顶棚覆盖长400m的铁轨区域,停靠的火车由多节载有待采样矿料的车厢组成,需要采用自动化改造来代替人工采样,自动定位每节车厢内可安全进行采样的区域并提供采样坐标集合给抽样控制系统,以便排除人为干扰,节约人力并提升作业效率。
单个云台无法覆盖如此狭长的大范围的区域,根据测算使用9个云台进行3D扫描,然后对每个云台的点云数据进行融合,最后对火车所有车厢数据进行去噪,分割以及定位处理。
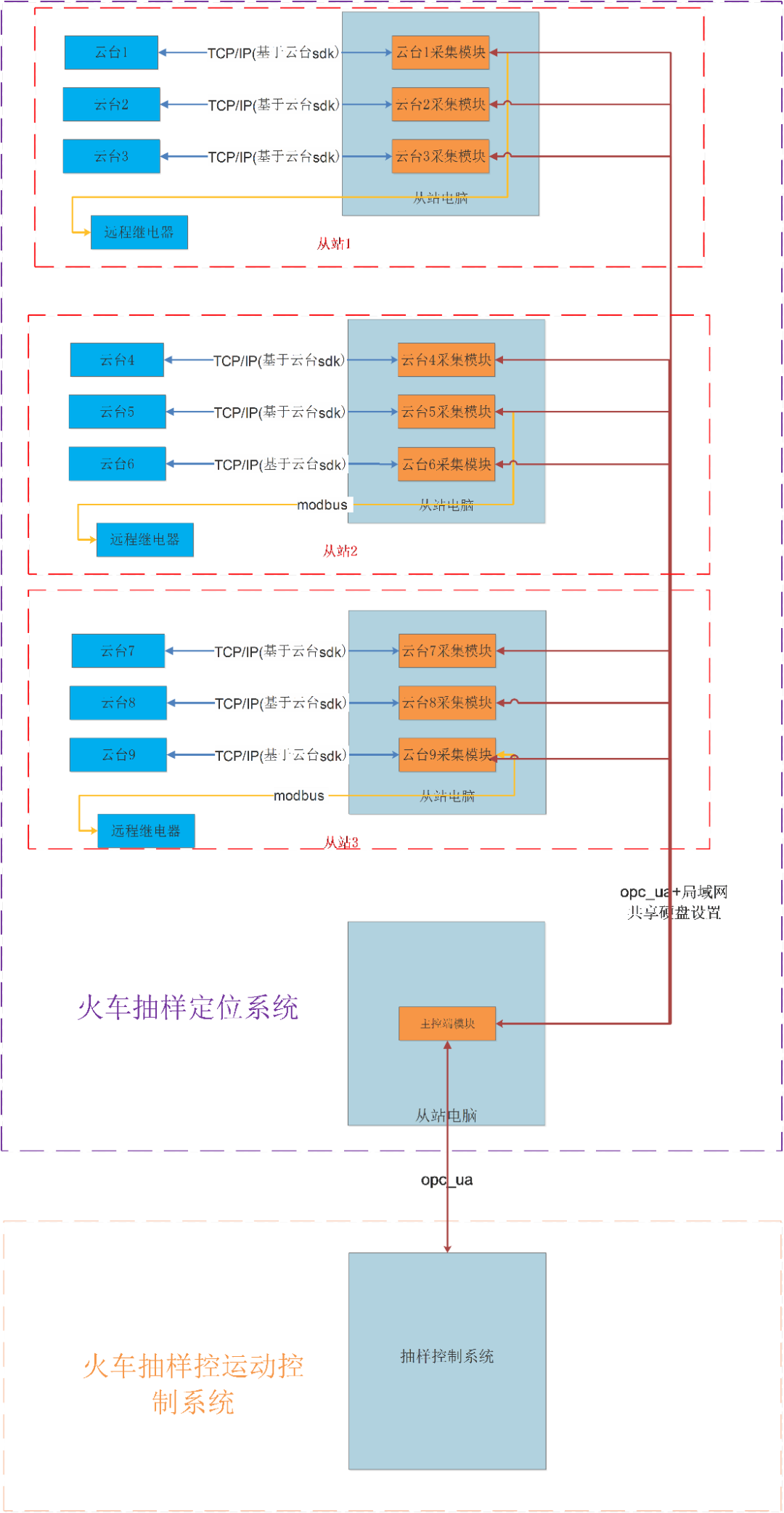
受限于单台电脑的处理能力,多云台的扫描系统往往需要使用多台电脑分别对部分云台进行控制,因此往往需要采用分布式的通讯(采用主站+3个从站网络架构),即从站各台电脑分别采集部分云台的数据进行采集,最终汇总到主站计算。
由此,主站的计算数据量剧增,为了满足生产作业的实时性,往往需进行计算加速。

上图分别为人工采样以及改造后的采样机器人自动采样
多个云台系统标定与点云融合
SICK 为了实现大范围扫描,需要对每个云台扫描的点云数据进行拼接与数据融合,并最终整合成一个统一坐标系的火车车厢模型。
标定方案使用不同的云台扫描标定箱,然后再通过高精度测绘设备来测绘标定箱上角点,基于多组对应数据计算出当前云台扫描坐标系与全局测绘坐标系的转换关系,以此类推,从而实现将多个云台扫描坐标系都统一到测绘全局坐标系。如下图所示。
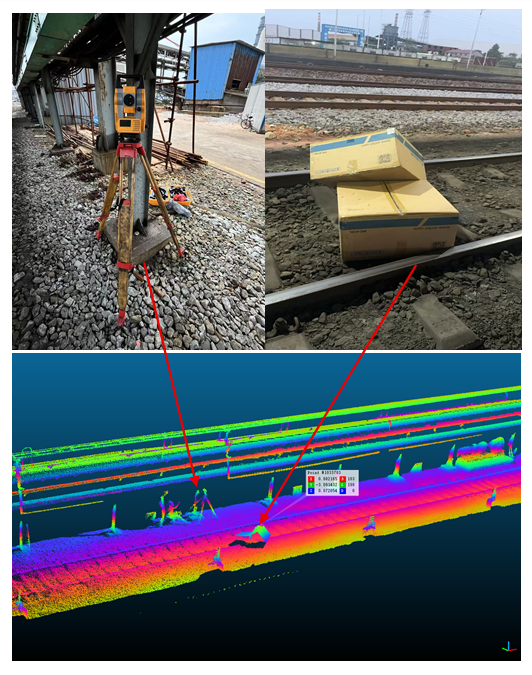
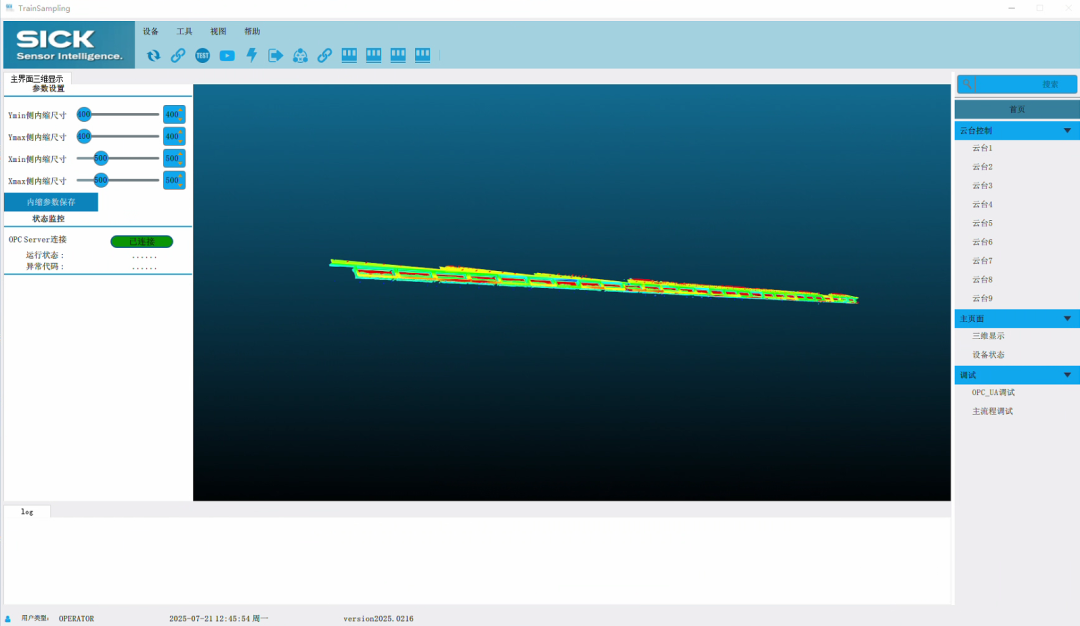
最终扫描拼接效果如下图所示
分布式通讯
基于OPC_UA的通讯方式,不仅实现了系统中多个从站电脑与主站系统的分布式通讯,而且实现了云台扫描系统与上位机c#软件的通讯,相比于传统的TCP/IP通讯方式,传输更加稳定安全,且便于不同编程语言所写软件的通讯。
并行计算加速
单云台的单次采集的点云个数为230万点左右,因此9个云台的采集点云数据到达2000万点左右,400米扫描范围以内的定位车厢多达29节,为减少数据处理时间,系统采用基于OpenMP并行计算加速。相比于普通的多线程加速,OpenMP并行计算加速更适用于算法中多个相同的对象需要并行计算的情况,满足了用户对现场采用作业节拍的要求。
系统优势
•多个云台标定与数据融合
覆盖范围更大,可满足大场景高精度的定位需求。
•分布式通讯
可根据客户现场的情况合理分配多台计算机资源,以实现数据通讯与采集以及计算效率的最大化。
•并行计算加速
适用并行计算加速的方法,处理海量的点云数据,减少了计算时间,保证了数据的反馈的及时性。
典型应用案例
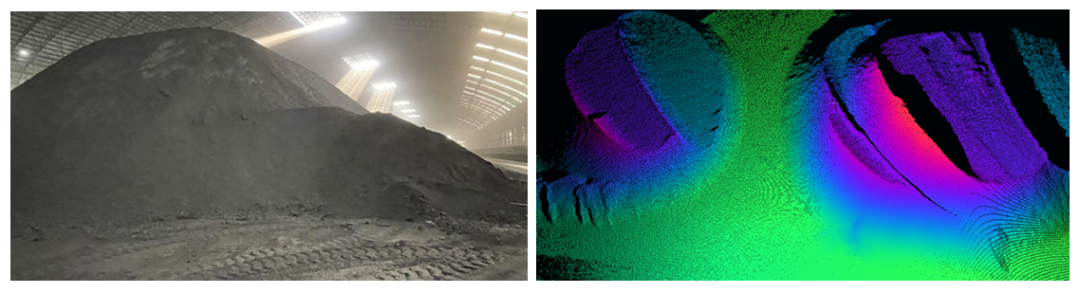
多个云台定点安装进行扫描,或多个雷达或云台配合作业机械运动,然后进行大场景的3D扫描及相关应用,特别在料场自动堆取料与盘库系统具有广泛应用:
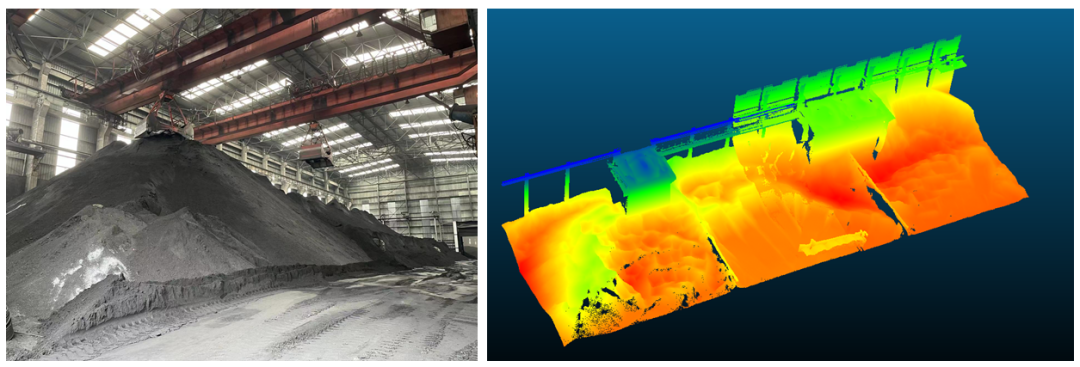
1. 顶棚库区物料定点盘库系统(通常无运动机械,云台定点安装在顶棚上):
2. 基于多雷达与多行车料场堆取料与盘库系统
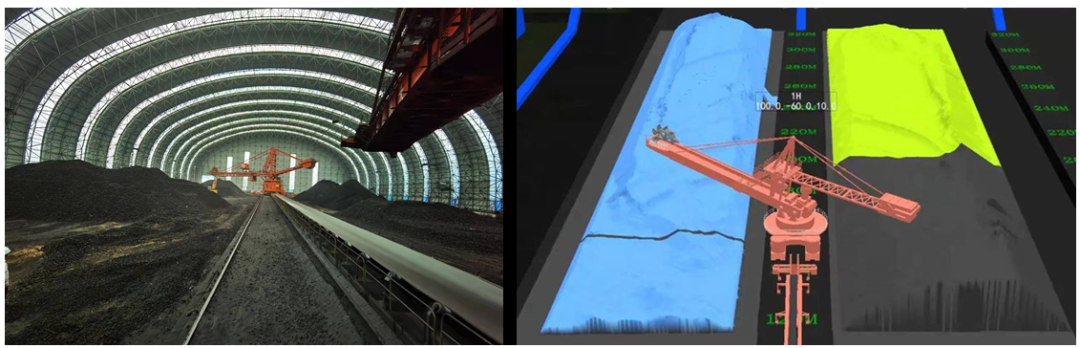
3. 基于斗轮机的料场堆取料与盘库系统
总结
SICK多云台扫描与点云数据融合系统,凭借其简易标定、分布式通讯的灵活性及高效计算能力,适用于大范围高精度扫描与定位场景,为用户的工艺流程自动化提供可靠保障。

|

