




西克|机器人臂端防护装置(EOAS):实现人机协作无碰撞安全

西克应用

概述
随着具备集成安全功能的协作机器人在工业领域的市场份额不断扩大,其易用性与快速部署优势吸引了大量应用。但在实际应用中,人机协作(HRC)的安全防护难度远超用户预期,尤其是机器人末端执行器周围的挤压风险防护,仅依靠机器人自身的力和功率限制无法满足安全需求。目前,行业多通过设置大范围防护区域或加装围栏来保护末端执行器危险区域,真正的人机协作应用难以落地。
SICK 推出的机器人臂端防护装置(End-of-Arm-Safeguard,简称 EOAS) ,作为全球首款针对机器人工具和工件区域的非接触式防护解决方案,有效降低挤压风险,为协作安全理念开辟全新可能。
01
行业背景与安全挑战
1.1 协作机器人应用现状
近年来,具备集成安全功能的工业协作机器人市场份额显著提升。其操作便捷、部署迅速的特点,使其在众多领域具备高吸引力,大规模落地人机协作应用的前景曾为机器人行业注入强劲动力。
但实际场景中,人机协作应用的安全防护存在诸多复杂问题:机器人末端执行器(工具)及所携带工件的挤压风险防护难度极高,仅依靠机器人自身的力和功率限制,无法达到理想的安全防护效果,导致真正的人机协作应用较少实现。
1.2 核心安全挑战
在协作机器人应用中,力控型机器人虽能在超过设定力限时停止运行,结合机械设计与其他安全措施,可限制机器人手臂与人体碰撞或挤压时的接触压力,避免严重伤害。但仍面临以下关键挑战:
•如何防护机器人工具及工件周围区域的安全?
•如何实现尖锐 / 有棱角物体的协作式搬运?
•如何提升工人对协作应用安全性的认可度?
•如何平衡安全防护与生产效率?
•如何降低集成商与终端用户在协作安全工程方面的难度,并实现规模化应用?

02
工作原理与应用条件
2.1 基本工作原理
EOAS 在机器人工具和工件周围生成防护区域,当防护区域被侵入时,立即触发机器人减速或安全停止。
需注意:由于公差、信号处理及机器人制动时间的影响,机器人夹具和工件周围的防护区域长度,必须大于 “危险范围”(即从传感器前屏测量的工具和工件长度)。
核心难题:当机器人靠近表面作业时,如何区分传感器视野中的操作人员手部与常规物体?可通过 “工艺点接近” 或 “工艺路径” 功能解决(详见下文)。
2.2 关键功能原理
2.2.1 工艺点接近
(Process Point Approach)
为区分传感器视野中的常规物体与操作人员手部,EOAS 采用 “工艺点” 方法:
工艺点接近流程从 “进入点” 开始,机器人沿 z 轴(从机器人工具法兰视角)向拾取位置(即 “工艺点”)做直线运动,完成后沿原路径返回进入点。
编程阶段,将上述接近运动与传感器测量数据作为参考模型存储。
自动运行阶段,当机器人再次接近同一工艺点时,将实际接近曲线与参考模型对比;若匹配,机器人可继续靠近表面;若不匹配(如手部侵入防护区域或工艺点环境变化),EOAS 立即控制机器人安全停止。
2.2.2 工艺路径(Process Path)
对于复杂的机器人运动,可采用 “工艺路径” 替代 “工艺点”:
工艺路径支持任意方向、角度的机器人运动编程,从 “进入点” 开始,沿自定义路径运动,最终到达 “退出点”
编程完成后,将路径与传感器测量数据作为参考模型存储
自动运行阶段,机器人沿工艺路径运动时,实时对比实际路径数据与参考模型;若匹配,继续运动;若不匹配(如手部侵入或路径环境变化),立即安全停止
要求:进入点与退出点需处于 “自由空间”(无传感器防护区域侵入)
2.2.3 人货分离平面(Muting Plane)
EOAS 人货分离功能可将机器人工作空间划分为协作区域与非协作区域:
•当机器人工具法兰穿过人货分离平面进入非协作区域时,EOAS 安全功能暂停
•当机器人返回协作区域时,EOAS 安全功能重新激活
•注意:非协作区域需根据应用专属安全方案,通过其他方式确保安全
03
应用领域与场景
3.1 核心应用领域
目前,EOAS 主要适用于以下协作机器人应用场景,后续将通过 EOAS URCap 软件升级,拓展至点胶、拧螺丝及非安全自动化功能等领域:
•拾取与放置(Pick & Place)
•装卸料(Machine Tending)
•搬运与装配(Handling & Assembly)
3.2 典型应用场景
场景 1:半自动质量检测
质量工程师在近距离分析机器人提供的检测对象时,EOAS 可防护操作人员手部免受挤压风险;实现手动与自动化流程的安全结合,既节省空间,又提升工人认可度。
场景 2:向机器流程送料
采用 EOAS 防护危险的工具 / 工件区域,替代机器人周围的大范围扫描防护;将安全所需空间降至最低,特别适合狭小作业环境。
场景 3:人员与机器人共同靠近工件料盘
操作人员向工件料盘补料时,机器人可正常运行,无需整体停机,提升处理效率;实现人机协作无手部挤压风险,增强工人接受度。

04
服务与支持体系
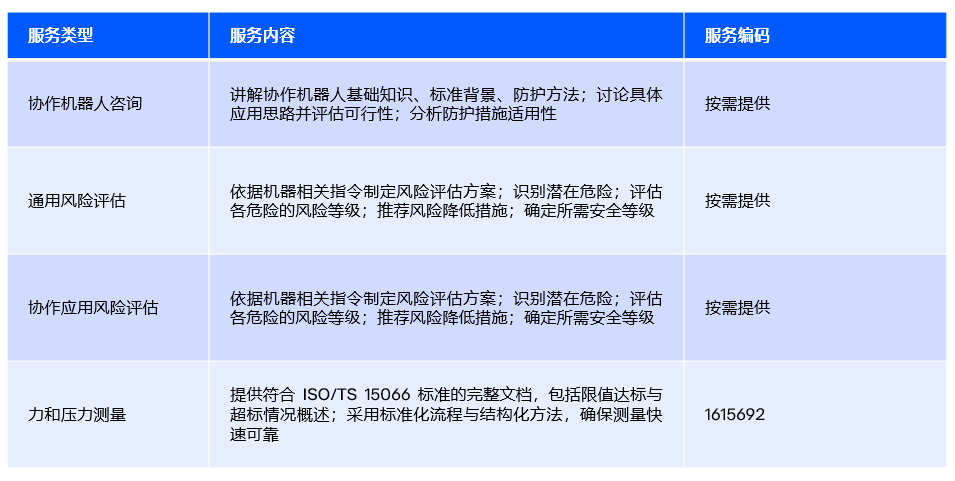
4.1 协作机器人安全服务
SICK 提供全方位的协作与协同机器人安全服务,具体如下:
4.2 产品与应用支持
SICK 建立三级支持体系,保障 EOAS 产品落地与应用:
一级支持:由各中国各地域销售单位提供应用支持
二级支持:由SICK专业的安全解决方案团队提供技术与应用支持
三级支持:由战略产品管理与研发团队提供支持

SICK
点击下方视频号,浏览更多视频
