|
һ������Ҫ��
1. �����豸���������Ҫ����������Ƶ�����Ŀ�������Զ�λ����Ϊ0.001���ף�
2. �����߱�����һ���ԣ����ȶ���ʵ������������Ʒ�����ڲ�أ�
3. �ɿ����������������ɵıջ���λЧ�ʾ����ܸߣ�
4. ���ܼ۸�Ⱦ����ܸߣ�
����ʵ�ַ����ͼ���
1. ���ռ���Ҫ����ʵ�ַ������£�
2. �����������ݼ��㸺�غ͵���Ĺ�����JL/J0:
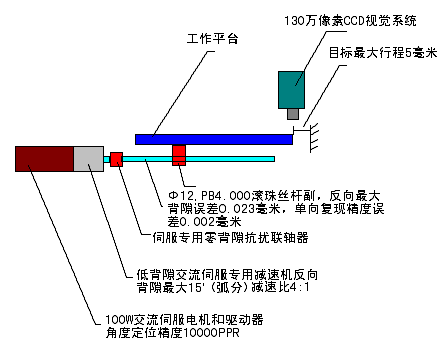
����ƽ̨���� 100KG
˿����Ч�г�100���ף�����4���ף�ֱ��12����
���ٻ����ٱ� 4:1
�ŷ���� 100W/AC220V/3P
���D�D�D�D�D�D�D�D�D�D�D�D�D�D
JL/J0=(0.56/16)/0.03=1.2
3. ���ع�����ԶԶС��5, ��˴�ϵͳ��ʵ��Լ150HZ���ϵ��ٶȻ���ӦƵ��������ϵͳ������Ҫ��
4. �粻����ƽ̨�������Ե��������˿����ĸ�����϶���ŷ�������г������������㣺
�ŷ�����Ƕȷֱ���10000PPR
����˿����������0.023����,����4����
���ٻ������϶���15���֣�1Բ�ܣ�360�㣽360*60�䣽360*3600�壩
���ٱ�4:1
�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D
���ٻ���϶���士����˿�˱�϶���壽7+230=237����
5. �粻����ƽ̨�������Ե��������˿����ĸ�ظ���λ���־��ȣ��ŷ���������г������������㣺
�ŷ�����Ƕȷֱ���10000PPR����λ����1PPR
����˿���ظ���λ����0.002���ף�����4����
���ٻ�ͬ��϶�������1���֣�1Բ�ܣ�360�㣽360*60�䣽360*3600�壩
���ٱ�4:1
�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D
�ŷ�����ظ���λ���壽20
6. ���嵱�����㣨��С�����ƶ���λ����
�ŷ�����Ƕȷֱ���10000PPR
����˿�˵���4����
���ٱ�4:1
�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D
�ŷ����1���������0.0001���ף�0.1�ף�
7. ��̬ʱ�����
�ŷ�������ת�٣�3000RPM
�ŷ������3000RPM���ƶ�һ�����嵱����ʱ�䣺2��
���ŷ��������ӦƵ����150HZ ԶԶ����2�룬�����ǵ����϶����Ϊ237,
�ۺϵó�ϵͳ�ջ���Ӧ��δ����ƽ̨���ӻ�������̬ʱ��Ϊ 6����
�翼�ǻ����İ�ȫ�ԣ����ʹ��������ڻ����ȶ���ϵͳ��Ӧʱ������20���룻
8. �Ӿ�ϵͳ���ܷ���
�������ϵͳ��е�ӹ����ء��¶ȡ�ʪ�����أ������������ﵽ1�ף��������ɷֱ��ҿ�����������ʵ��0.1����С������λ��ϵͳ��������CCD�Ӿ�ϵͳ���Ծ�����
����ǰ�����������¾��ܶ�λϵͳ����������Ƽ���ʵ�ֲ���
1. �ŷ������������˿�˸���0.1�IJ��������ƶ���
2. λ������ķ��������˶����ƿ�����AB�����壬��A��ǰB��90�㣬�����������A���ͺ�B��90�㣬�����ת��
3. �������˶�ʱ��λ�����������;����ظ���λ�������20������ĸ�����
4. ���������ʱ���������237������ı�϶��
5. ��������Ҫ������CCD�Ӿ�ϵͳ�ıջ����ƣ�����װ�õ�������Զ�λ��������CCD�Ӿ�ϵͳ����֤�ģ�
�ģ������ܽ�
1. ��ϵͳ�İ�����Ԫ����ϸ�嵥��
a) �ŷ����������ASD0121LA 3EA
b) �ŷ���� ASMT01L250AK 3EA
c) �ŷ��������������ͷ 3��
d) ����4����������˶����ƿ� MPC07 1EA
e) �ŷ����������6*2*0.34���� 18��
f) �ŷ����3*0.75��Դ�������� 18��
g) �ŷ����6*2*0.34���Ƶ��� 6��
h) �ŷ����40*40/ 4:1ר�ü��ٻ� 3EA
i) �ŷ����ר�������� 3EA
j) 0.023��12*4.000��100������˿�˸� 3EA
2. �����漰����Ԫ����
a) ���Ե���
b) �Ӿ�ϵͳ
����BANNER���Ӿ�ϵͳ����һ�廯�Ӿ�ϵͳ��ͨ�������������Ӿ����Ϳ��Ʒ��������´����Ӿ�ϵͳ���ѻ����У����кͼ������ݿ���ͨ������ӿ���PLC�ػ���ͨ��Ӳ���ʹ�ͳ���Ӿ��ɼ��忨������ͷ�Ľṹ��ȫ��ͬ����������ʽ�Ľṹ�ɿ��Ժ��ȶ��Զ��dz��ã�
�����Ĺ��̷dz���ϵͳҲ���ȶ�������С�˳�������
c) ��ѹ���ϵͳ
d) ���ٹ�硢���˴�����Ԫ����
e) ��ҵ���Ƽ��ٻ�
f) ����������Ӧ��
3. ��ϵͳ�Ƿdz�����Ŀ���ģʽ��
4. ��ϵͳ���漰��Ԫ��Ʒ�����ڱ�֤�ҿɿؿɲ⣻
5. ��ϵͳ���������ڱ�֤��
|