|
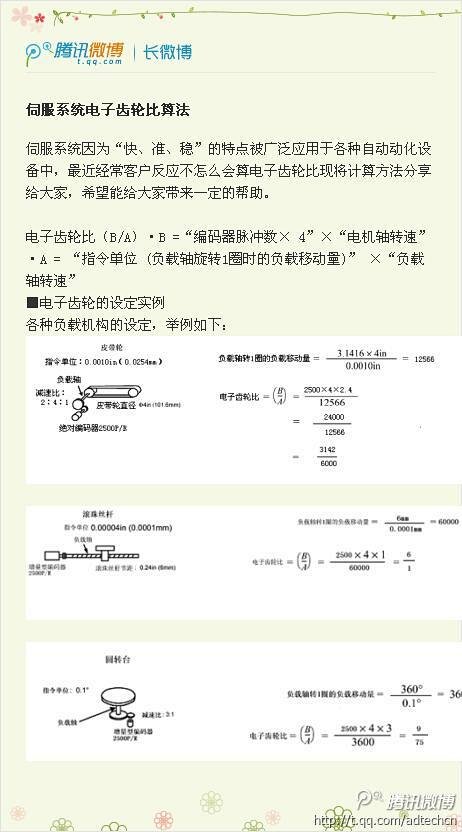
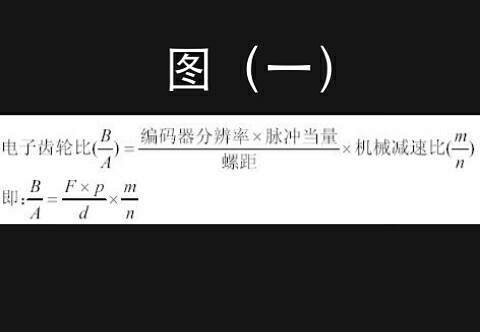
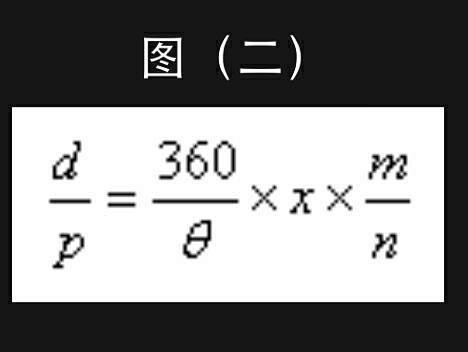
【关于电子齿轮比】电子齿轮比的2个功能:1、可以任意地设置每单位指令脉冲对应的电机的速度和位移量(脉冲当量);2、当上位控制器的脉冲发生能力(最高输出频率)不足以获得所需速度时,可以通过电子齿轮功能(指令脉冲倍频)来对指令脉冲进行×N倍频。 电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。如分子大于分母就是放大,如分子小于分母就是缩小。例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。上位机输入频率100HZ,电子齿轮比分子设为2,分母设为1,那么伺服实际运行速度按照200HZ的脉冲来进行。 计算电子齿轮比(B/A) 明白几个概念: 编码器分辨率(F):伺服电机轴旋转一圈所需脉冲数。看伺服电机的铭牌,在对驱动器说明书既可确定编码器的分辨率。 每转脉冲数(f):丝杠转动一圈所需脉冲数。 脉冲当量(p):数控系统(上位机)发出一个脉冲时,丝杠移动的直线距离或旋转轴转动的度数,也是数控系统所能控制的最小距离。这个值越小,经各种补偿后越容易到更高的加工精度和表面质量。脉冲当量的设定值决定机床的最大进给速度,当进给速度速度满足要求的情况下,可以设定较小的脉冲当量。 螺距(d):螺纹上相邻两牙对应点之间的轴向距离。 电子齿轮比计算公式如图(一): 【步进电机脉冲当量和细分数的关系】 在实际调整时可先确定脉冲当量,在根据关系式计算细分数。或先确定细分数,再计算脉冲当量。 如图(二): 其中: x表示步进驱动器细分数, θ表示步进电机步距角。 【 关于旋转轴】 与直线运动轴相比区别在于:旋转轴的螺距值为360,其它计算相同,只需将螺距值换为360。 微量进给、脉冲速度以及滚珠丝杠导程之间的关系 1、使用步进电机时的最小进给量 S=E*Ph*A/360 S:最小进给量,mm E:步进电机和驱动器的步进角度,度 Ph:滚珠丝杠的导程,mm A:减速比,即滚珠丝杠转速/电机转速 2、使用伺服电机时的分辨率 S=Ph*A/B S:最小进给量,mm Ph:滚珠丝杠的导程 A:减速比,即滚珠丝杠转速/电机转速 B:角度测试仪和驱动器的分辨率,即每转脉冲数,p/rev 3、使用步进电机时脉冲速度的计算 F=V*1000/S F:脉冲速度,Hz V:进给速度,m/s S:最小进给量,mm 4、滚珠丝杠导程的计算 Ph=60000V/N/A Ph:滚珠丝杠的导程 V:进给速度,m/s N:电机的额定转速,rpm A:减速比,即滚珠丝杠转速/电机转速 总结:从上述公式知道,滚珠丝杠的最小进给量和其精度没有关系,在实际使用中不要认为系统的最小进给量越小则其丝杠的精度也越高。要想使最小进给量实现更小(即提高系统的分辨率)可以: ①:相应提高步进电机和驱动器的细分数/伺服电机角度测试仪和驱动器的分辨率; ②:减小丝杠的导程, ③:改变减速比。

|

