|
今天,正运动小助手给大家分享一下 运动控制器轴回零的配置与实现。本文主要介绍控制器提供的回零模式,驱动器自身的回零模式我们将在下篇为大家讲解。
01 轴回零
一、回零说明
在高精度自动化设备上都有自己的参考坐标系,工件的运动可以定义为在坐标系上的运动,坐标系的原点即为运动的起始位置,各种加工数据都是以原点为参考点计算的。
所以启动控制器执行运动指令之前,设备都要进行回零操作,回到设定的参考坐标系原点,若不进行回零操作,会导致后续运动轨迹错误。
正运动控制器提供了多种回零方式,通过DATUM单轴回零指令设置,不同模式值选择不同的回零方式,各轴按照设置回零的方式自动回零。
DATUM指令为单轴回零指令,每次作用在一个轴上,多轴回零时,需要对每个轴都使用DATUM指令回零。
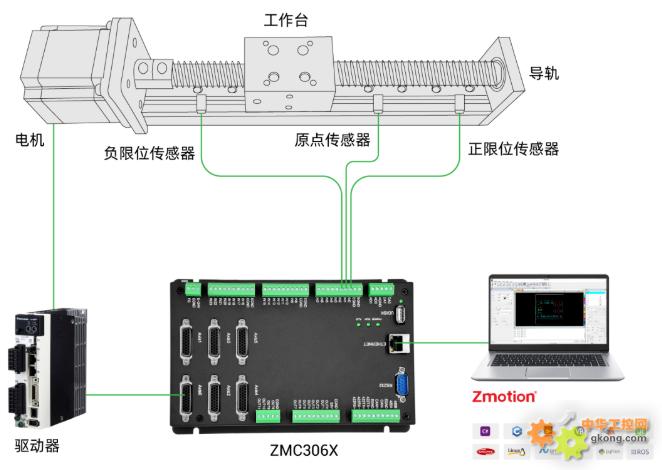
回零时机台需要接入原点开关(指示原点的位置的到位传感器)和正负限位开关(均为传感器,传感器检测到信号后,表示有输入信号,传给控制器处理)。
单轴找原点时,原点开关通过DATUM_IN设置,正负限位开关分别通过FWD_IN和REV_IN设置。控制器正/负限位信号生效后,会立即停止轴,停止减速度为FASTDEC。
设备回零方式有控制器回零和伺服参数回零。
控制器回零是把零点位置传感器连接到运动控制器上,控制器通过搜索零点传感器位置回零点。本文主要介绍控制器提供的回零模式。
伺服参数回零是将零点传感器连接到伺服驱动器上,控制器通过发送命令给伺服驱动器,伺服驱动器进行回零的操作。驱动器自身的回零模式请参考下篇。
二、回零相关指令
运动控制器回零常用的相关指令如下表所示。

1.回零指令DATUM
DATUM是运动控制器的回零指令,相关回零搜索模式 很多,根据当前轴所处的位置或效率要求选择合适的模式,DATUM指令指令后轴开始运动,搜寻原点信号,遇到原点信号后自行停止,将当前的位置清零,回零成功,详情参见下节说明。
语法: DATUM(模式)
2.映射原点输入DATUM_IN
运动控制器原点开关的设置,对应输入口IN信号。
语法: DATUM_IN = 输入口编号,-1取消映射
对于ZMC系列的控制器,由于 输入OFF时认为有信号输入 (ECI系列控制器与之相反),原点和正负限位开关等特殊信号映射完成需要 INVERT_IN 反转输入信号。
3.回零速度SPEED、CREEP
回零运动中为了更精确的找到零点,会使用爬行速度CREEP和轴运行速度SPEED来进行原点搜寻,SPEED设置相对大一些,用于快速搜寻原点开关的位置,CREEP一般为较小值,爬行到原点开关处停止,回零成功。
语法: SPEED = 数值
语法: CREEP = 数值
4.正负限位FWD_IN、REV_IN

硬限位开关是限制轴的最大“允许行进范围”的限位开关。硬限位开关是物理开关元件,硬限位开关由指令映射到相应输入开关信号上,根据开关信号是常开还是常闭确定是否要对信号进行翻转,设置完成后,碰到硬限位开关,对应轴立即停止运动,停止减速度为FASTDEC。
软限位开关将限制轴的“工作范围”,由指令直接设置限位位置,轴走到设置位置后立即采用减速度FASTDEC停止运动,它们应位于机床限制行进范围的相关硬限位开关的内侧。由于软限位开关的位置较为灵活,因此可根据当前的运行轨迹和具体要求调整轴的工作范围。
工作台碰到限位开关或者规划位置超越软限位时,运动控制器紧急停止工作台的运动。限位触发以后,轴无法继续运动,此时需要调整轴的位置,使其远离限位位置才能重新开始运动。
轴在碰到限位的时候才会产生停止信号,此时由于减速需要一定的时间,实际轴的位置会越过限位一定距离,假设停止时SPEED速度是v 0 ,快减速FASTDEC为a,计算公式:
( v t ) 2 - ( v 0 ) 2 =2as
带入下方数据:0-100 2 =2*(-1000)*s,得出减速的距离s=5,由此可得,增大FASTDEC和减小SPEED都能达到减小减速距离的目的,以防止过冲。
语法:
FWD_IN = 输入口编号,-1取消映射
REV_IN = 输入口编号,-1取消映射
5.回零反找延时HOMEWAIT
对脉冲方式的伺服驱动器,部分回零模式碰到原点信号之后停止,由于找原点SPEED速度较快产生过冲,停止之后需延时之后在CREEP速度反向找原点,控制器默认值为延时2ms。需要运行更平稳的场合可适当增加反找延时。
语法: HOMEWAIT=数值(毫秒单位)
6.轴状态AXISSTATUS
查看轴当前的状态,可以查询控制器是否处于回零状态,遇到限位开关或软件限位将会产生报警提示。
AXISSTATUS的值对应的说明如下,同时发生多种错误,用组合值表示。

打印信息如下: 表示在轴0回零过程中碰到正向限位开关后停止轴运动,并打印轴状态报警提示,解除报警可以将轴反向运动,离开限位开关即可。
Axis: 0 AXISSTATUS:50h,FWD
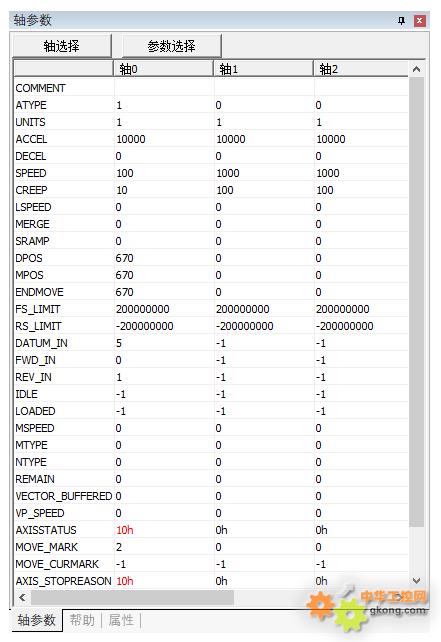
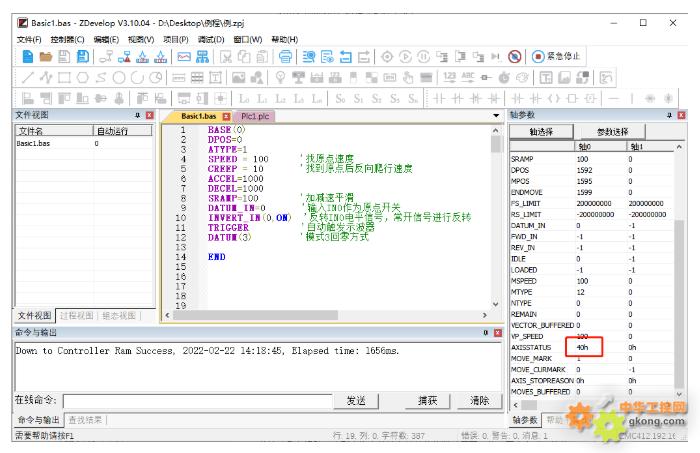
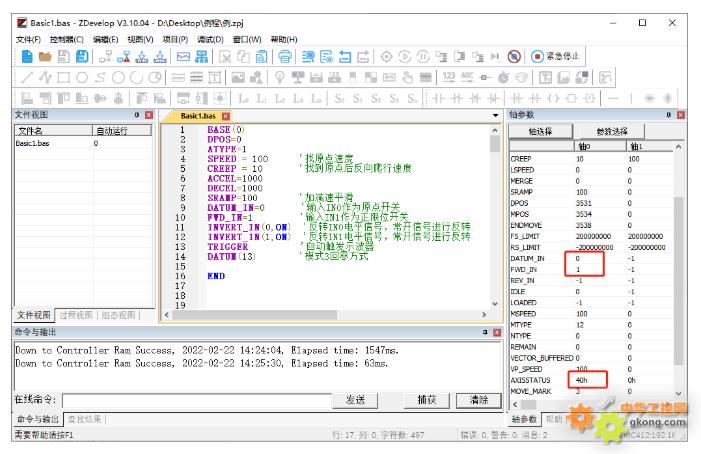
如下图,可通过轴状态窗口实时的监控AXISSTATUS。
三、回零模式详解
语法: DATUM(模式)
表的模式+10(10+n)表示碰到限位后反找,不会碰到限位停止,例如DATUM(13) = DATUM(3+10),使用DATUM(13)的回零方式,碰到正限位后不停止,而是反向运行,多用于原点在正中间的情况。
表的模式+100(模式100+n和110+n分别对应n和10+n), 表示回零成功之后,自动清零MPOS,例如DATUM(103)、DATUM(113),适用于ATYPE=4,接入编码器后可以自动清零MPOS(仅限4系列) ,其他的模式自动清零DPOS,MPOS需要手动清零。
02 控制器回零模式
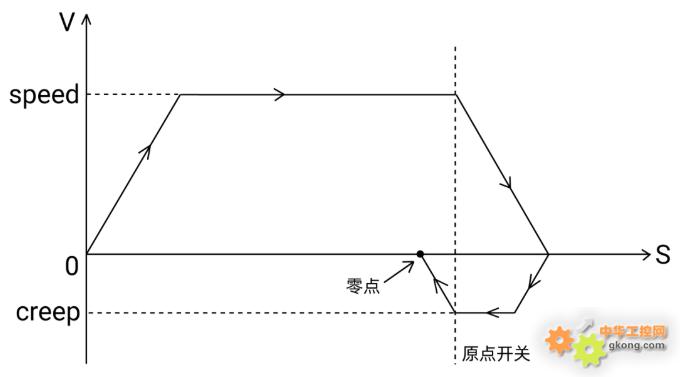
下面以上表最基础的几种模式展开详细讲解。
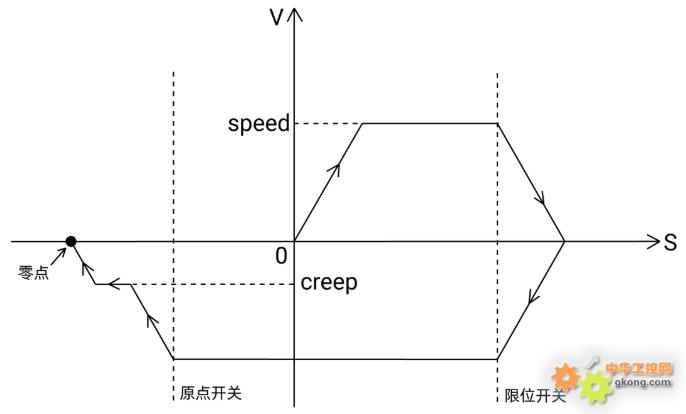
纵轴V为运动速度,横轴S为相对运动起始点的距离。
1. 回零模式1
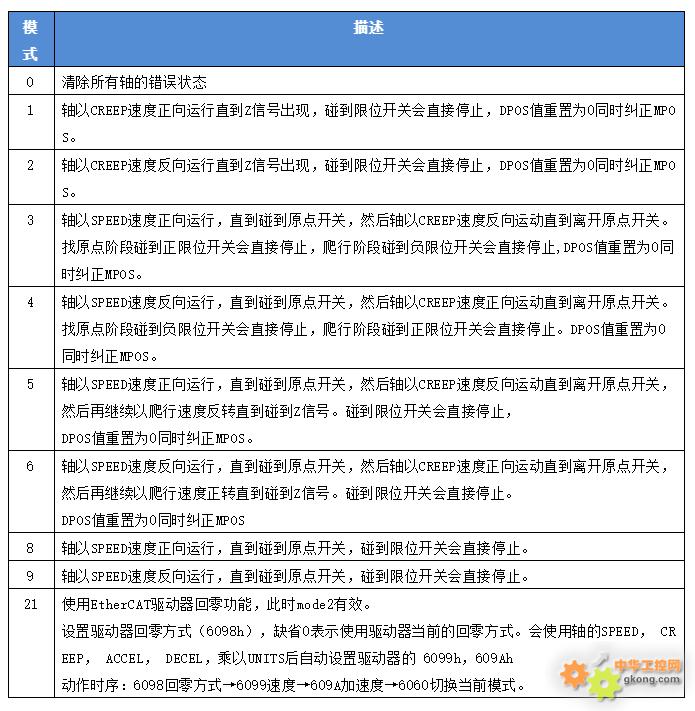
DATUM(1)轴以CREEP速度正向运行,直到Z信号出现后开始减速,停止后所处位置为零点,此时将DPOS值重置为0,回零途中若碰到限位开关会直接停止。
回零模式2与模式1找原点运动方向相反。

2. 回零模式3
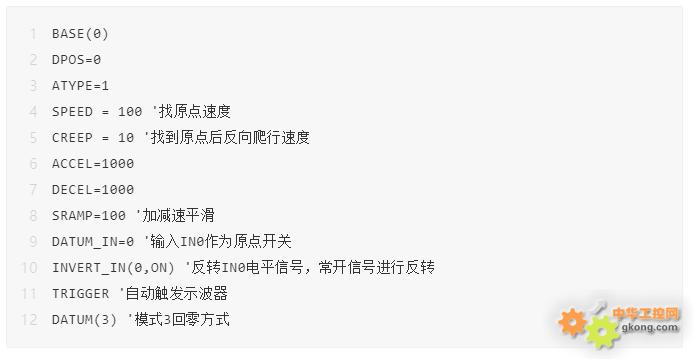
DATUM(3)轴以SPEED速度快速正向运行,直到碰到原点开关后开始减速,减速到0之后再反向以CREEP速度找原点,再次碰到原点之后减速停止,轴停止之后将DPOS值重置为0,当前所处位置为零点,回零途中若碰到限位开关会直接停止。
回零模式4与模式3找原点运动方向相反。
3.回零模式5
DATUM(5)轴以SPEED速度快速正向运行,直到碰到原点开关后开始减速,减速到0之后再反向以CREEP速度运动,直到Z信号出现之后减速停止,遇到Z信号立即减速停止,停止的位置为零点,将DPOS值重置为0,回零途中若碰到限位开关会直接停止。
回零模式6与模式5找原点运动方向相反。

4.回零模式8
DATUM(8)轴以SPEED速度快速正向运行,直到碰到原点开关后开始减速,减速到0之后便将DPOS值重置为0,停止后所处位置为零点,回零途中若碰到限位开关会直接停止。
回零模式9与模式8找原点运动方向相反。

5.回零模式13
DATUM(13)轴以SPEED速度快速正向运行,若先碰到限位开关,不会报警停止,以SPEED速度反向找原点,遇到原点信号后减速为CREEP直到离开原点开关立即停止,回零成功,位置清零;若先碰到原点信号,则与模式3相同。
回零模式14与模式13找原点运动方向相反。

03 控制器回零方式
1.模式3单轴回零示例:
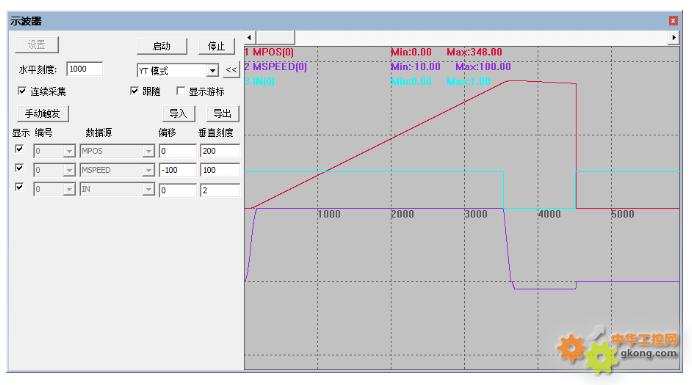
运行效果如下图:
正在找原点时轴状态AXISSTATUS显示40h,回零成功变为0h。
如下图,轴0以SPEED = 100的速度正向运行,直到碰到原点开关信号IN(0),然后以CREEP = 10的速度反向运动,直到再次离开原点开关的位置时停下,此时回零完成,轴的DPOS自动置0,若中途碰到限位开关,轴立即停止。
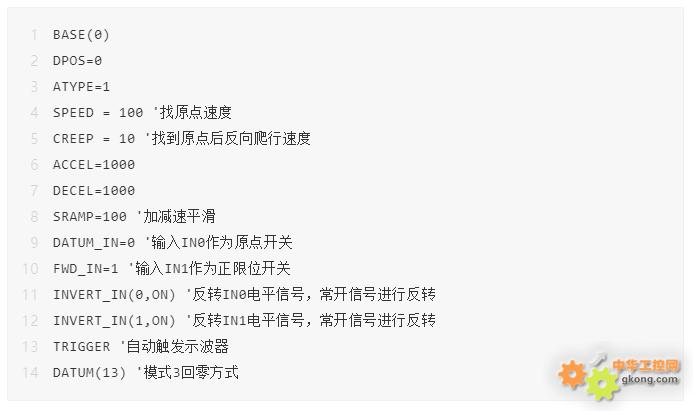
2.DATUM(13)模式,对比DATUM(3),碰到限位开关轴不停止,而是反向找原点,如下示例:
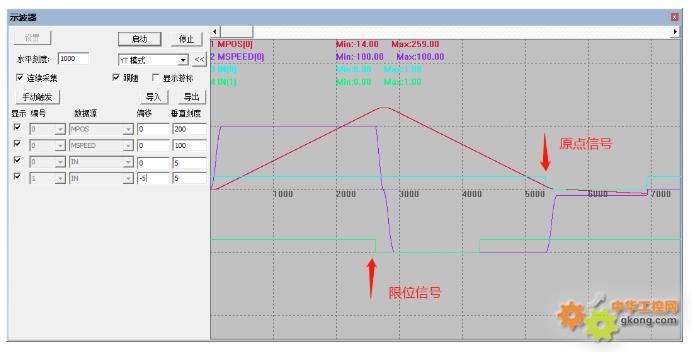
运行效果如下图:
正在找原点时轴状态AXISSTATUS显示40h,回零成功变为0h,原点开关和限位开关的映射也可在轴参数窗口查看。
如下图,轴0以SPEED = 100的速度正向运行,碰到正向限位开关IN(1),开始反向找原点开关信号,直到碰到原点开关信号IN(0),然后以CREEP = 10的速度反向运动,直到再次离开原点开关的位置时停下,此时回零完成,轴的DPOS自动置0。
教学视频:
本次,正运动技术运动控制器轴回零的配置与实现,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位等等。
|

