|
±ѕОДТФХэФЛ¶ЇјјКхѕЯ±ёЧЁУГКЦВЦЅУїЪµДФЛ¶ЇїШЦЖЖчZMC408CEОЄАэЈ¬ЅйЙЬКЦВЦЎўКЦВЦµДЧчУГј°ФАнЎўїШЦЖЖчКЦВЦЅУїЪЅУПЯТФј°КЦВЦіМРтЕдЦГЎЈ
ЙПЅЪЅІЅвБЛК№УГХэФЛ¶ЇbasicУпСФЅшРРКЦВЦУ¦УГЕдЦГЈ¬ ±ѕЅЪЦчТЄЅІЅвC++µчУГAPIєЇКэївЅУїЪКµПЦКЦВЦЕдЦГЎЈ
01 КЦВЦЧчУГј°ФАн
КЦВЦТІіЖКЦТЎВціе·ўЙъЖчЈ¬ЦчТЄУГУЪКэїШ»ъґІЎўБўМејУ№¤ЦРРДЎўОФКЅјУ№¤ЦРРДЎўБъГЕјУ№¤ЦРРДµИКэїШЙи±ёЎЈµ±КЦВЦРэЧЄК±Ј¬±аВлЖчІъЙъУлКЦВЦФЛ¶ЇПа¶ФУ¦µДРЕєЕЈ¬НЁ№эКэїШПµНіСЎ¶ЁЧщ±кІў¶ФЧщ±кЅшРР¶ЁО»ЎЈ
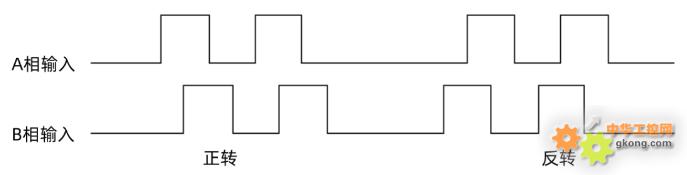
КЦ¶ЇВціе·ўЙъЖчЛьЦРРДУРЦбµД№вµзВлЕМЈ¬ЖдЙПУР»·РОНЁЎў°µµДїМПЯЈ¬ТЎ¶ЇКЦВЦєуЈ¬УЙ№вµз·ўЙдєНЅУКХЖчјю¶БИЎЈ¬»сµГ2ЧйХэПТІЁРЕєЕHAЎўHBЈ¬ГїёцХэПТІЁПаІо90¶ИПаО»ІоЎЈУЙУЪHAЎўHBБЅРЕєЕПаІо90¶ИЈ¬їЙНЁ№эAПаФЪЗ°»№КЗBПаФЪЗ°Ј¬ёшіцХэЧЄВціе»т·ґЧЄВціеИҐїШЦЖЛЕ·юµз»ъХэЧЄ»т·ґЧЄЎЈ
02 КЦВЦЅйЙЬ
1. НЁ№эКЦВЦЙПµД“ЦбСЎФсРэЕҐ”СЎФсРиТЄТЖ¶ЇµДЧш±кЦбЈ»
2. НЁ№э“±¶ВКСЎФсРэЕҐ”СЎФсєПККµДТЖ¶Ї±¶ЈЁ×1/×10/×100Ј©Ј»
3. РэЧЄ“КЦВЦТЎ±ъ”ТЖ¶ЇЧш±кЦбЎЈЛіК±ХлРэЧЄОЄХэПтТЖ¶ЇЈ¬ДжК±ХлРэЧЄОЄёєПтТЖ¶ЇЈ¬РэЧЄЛЩ¶ИїмВэїЙТФїШЦЖЧш±кЦбµДФЛ¶ЇЛЩ¶ИЈ»
4.°ґЕҐ“ј±НЈ”Ј¬Ѕфј±НЈЦ№КЦВЦФЛ¶ЇЈ»
5.їШЦЖЖчКЦВЦЅУїЪОЄЛ«ЕЕ±кЧјDB15ДёН·Ј¬РиТЄКЦВЦЅУН·ОЄЛ«ЕЕ±кЧјDB15№«Н·ЎЈ

03 їШЦЖЖчКЦВЦЅУїЪЅУПЯ
1.УІјюЅйЙЬ
°ёАэІЙУГZMC408CEФЛ¶ЇїШЦЖЖчЈ¬ѕЯ±ёЧЁУГµДКЦВЦЅУїЪЎЈ
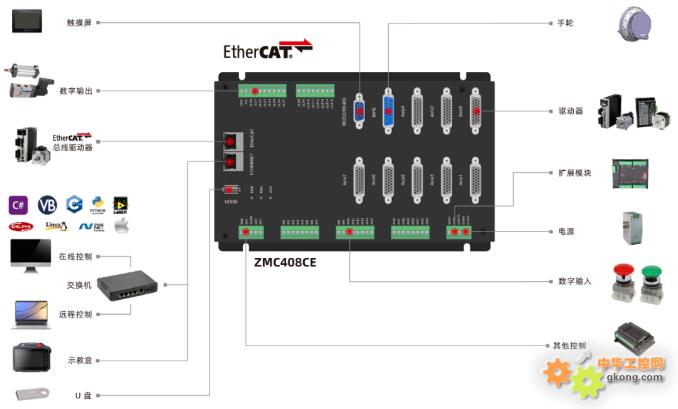
ZMC408CEКЗХэФЛ¶ЇјјКхНЖіцµДТ»їоёЯРФДЬEtherCATЧЬПЯФЛ¶ЇїШЦЖЖчЈ¬єЛРДјјКхІЙУГБЛПИЅшµДFPGAјјКхЈ¬КµПЦУІјюО»ЦГ±ИЅПКдіцЎўѕ«ЧјКдіц№¦ДЬЈ¬±ЈЦ¤Б¬Рш№мјЈјУ№¤µДіцЙ«РФДЬєНОИ¶ЁРФЈ¬ТФј°¶ЇМ¬КэѕЭІ¶»сµДКµК±РФЈ¬ґУ¶шКµПЦёьјУѕ«ЧјїШЦЖєНМбёЯЙъІъР§ВКєНЖ·ЦКЎЈ
ZMC408CEЦ§іЦEtherCATЧЬПЯЦб + ВціеЦб»мєПІеІ№Ј¬їЙНС»ъ»тБЄ»ъФЛРРЈ¬їЙїШµз»ъЦбКэ8ЦбЈ¬МШКвРНєЕМṩ16»т32ЦбїЙСЎЈ¬Ц§іЦZDevelop + ¶аЦЦёЯј¶ЙПО»»ъ»мєП±аіМЈ¬їЙТФКµПЦµгО»ФЛ¶ЇЎўµзЧУН№ВЦЎўЦ±ПЯІеІ№ЎўФІ»ЎІеІ№ЎўБ¬Рш№мјЈјУ№¤єН30+ЦЦ»ъЖчИЛДЈРНµДїШЦЖЎЈ
ZMC408CEІъЖ·ББµг
1.ёЯРФДЬґ¦АнЖчЈ¬МбЙэФЛЛгЛЩ¶ИЎўПмУ¦К±јдєНЙЁГиЦЬЖЪµИЈ»
2.Т»О¬/¶юО¬/ИэО¬Ўў¶аНЁµАКУѕх·ЙЕДЈ¬ёЯЛЩёЯѕ«Ј»
3.О»ЦГН¬ІЅКдіцPSOЈ¬Б¬Рш№мјЈјУ№¤ЦР¶Фѕ«ГЬµгЅєЅєБїїШЦЖєНј¤№вДЬБїїШЦЖµИЈ»
4.¶аЦбН¬ІЅїШЦЖЈ¬¶аЧш±кПµ¶АБўїШЦЖµИЈ»
5.EtherCATН¬ІЅЦЬЖЪїЙїмЦБ125usЈ»
6.EtherCATЧЬПЯєНВціеЦб»мєПІеІ№Ј»
7.Ц±ПЯІеІ№ЎўИОТвїХјдФІ»ЎІеІ№ЎўВЭРэІеІ№ЎўСщМхІеІ№µИЈ»
8.У¦УГБй»оЈ¬їЙPCЙПО»»ъїЄ·ўЈ¬ТІїЙНС»ъ¶АБўФЛРР Ј»
2.їШЦЖЖчКЦВЦЅУїЪMPG¶ЁТе
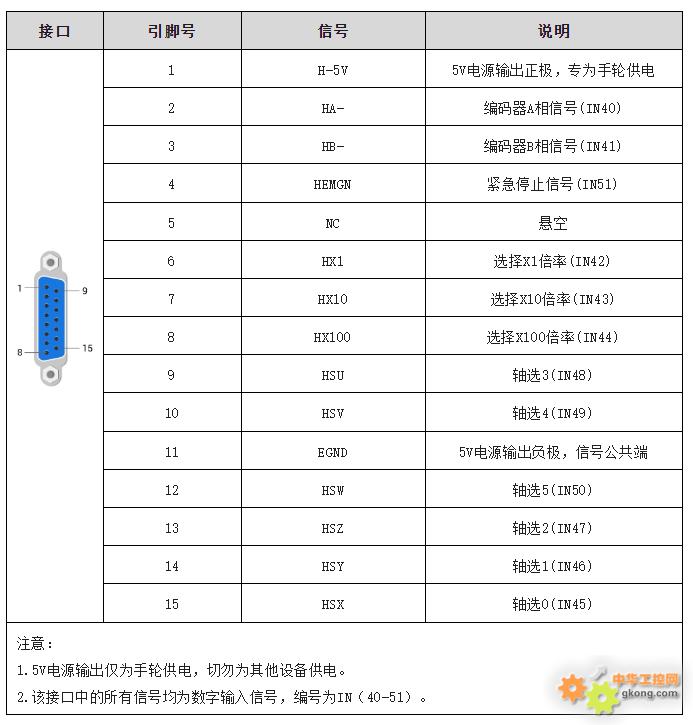
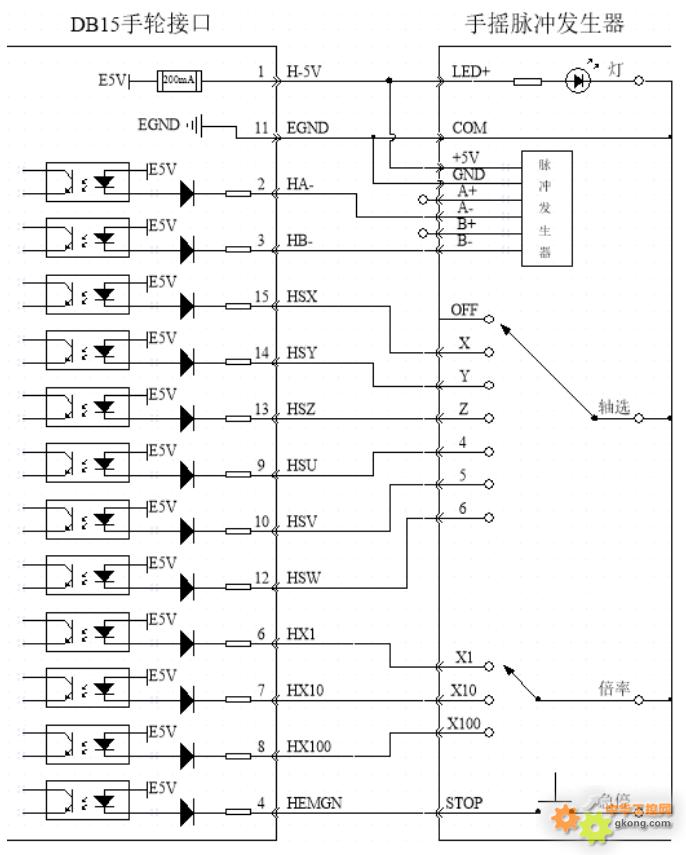
3.КЦВЦЅУПЯІОїј
4.ЧўТвКВПо
КЦВЦ±аВлЖчЦбЅУїЪЅУПЯФАнИзЙПНјЛщКѕЈ¬КЦВЦі§јТµДЙијЖ¶аЦЦ¶аСщЈ¬ЗлПИІйїґКЦВЦДЪІїµДЙијЖНјєуУлФЛ¶ЇїШЦЖЖчИ·ИПХэИ·єуЅчЙчЅУПЯЈ»ЗлК№УГЛ«ЅКЖБ±ОПЯЈ¬УИЖдКЗ»·ѕі¶сБУµДіЎєПЈ¬Ос±ШК№ЖБ±ОІгід·ЦЅУµШЎЈ
04 єЇКэЅУїЪЦёБоЛµГч
К№УГZAux_Direct_ConnectГьБоЈ¬Ѕ«КЦВЦБ¬ЅУµЅФЛ¶ЇЦбЈ¬ЦёБоЛµГчИзПВ±нЎЈ

05 C++іМРтЕдЦГ
1.ЕдЦГІЅЦи
ЈЁ1Ј©ІОїјТФЙП КЦВЦЅУПЯКѕТвНјХэИ·Б¬ЅУКЦВЦєНїШЦЖЖчЈ»
ЈЁ2Ј©ЙЁГиОДХВД©ОІ¶юО¬ВлЈ¬ПВФШАэіМЈ¬К№УГVisual Studio 2022Ј¬ґтїЄC++КЦВЦФЛ¶ЇАэіМЈ¬ФЛРРЦ®єуёщѕЭРНєЕСЎФсEtherNETЎўґ®їЪЎўPCIЎўLOCALИОТвТ»ЦЦЅУїЪБ¬ЅУїШЦЖЖчЎЈ
ЈЁ3Ј©ЕдЦГЦбєЕЈ»І»Н¬їШЦЖЖчРНєЕЈ¬КЦВЦЦбєЕЈ¬±¶ВКєНЦбСЎФсIN±аєЕІ»Т»СщЈ¬ПкЗйЗлІОїјїШЦЖЖчУГ»§КЦІбЈ¬±ѕАэіМК№УГїШЦЖЖчРНєЕОЄZMC408CEЈ¬КЦВЦЅУїЪЦбєЕОЄ8Ј¬ёГїШЦЖЖчКЦВЦЅУїЪОЮїЙУГД¬ИПAXISЦбєЕЈ¬±ШРлЅшРРУіЙдІЕїЙТФК№УГЈ¬УіЙд±ЬїЄВціеЦбєЕЈ¬ґЛАэіМКЗЅ«КЦВЦУіЙдµЅЦб10ЎЈ
ЈЁ4Ј©ЕдЦГIOЈ»ёщѕЭРиТЄёіУиЦбСЎЈЁHSXЈ¬HSYЈ¬HSZЈ¬HSUЈ©єН±¶ВКЈЁHX1Ј¬HX10Ј¬HX100Ј©ТФј°Ѕфј±НЈЦ№ ЈЁHEMGNЈ©№¦ДЬЈ»ХвР©РЕєЕ±ѕЦКОЄКэЧЦКдИлРЕєЕЈ¬УР№М¶ЁµД±аєЕЈ¬µ«ОЮ№М¶ЁµД№¦ДЬЈ¬РиТЄZDevelopїЄ·ўЈ»ЖдГыіЖОЄНЖјцЕдЦГµД№¦ДЬЈ¬ЦбСЎјґОЄconnectН¬ІЅФЛ¶ЇµД±»Б¬ЅУЦбЈ¬±¶ВКјґconnect±ИВКЎЈ
ЈЁ5Ј©НкіЙТФЙПЕдЦГјґїЙїЄКјК№УГКЦВЦЎЈ
2.іМРтФЛРРЅзГж
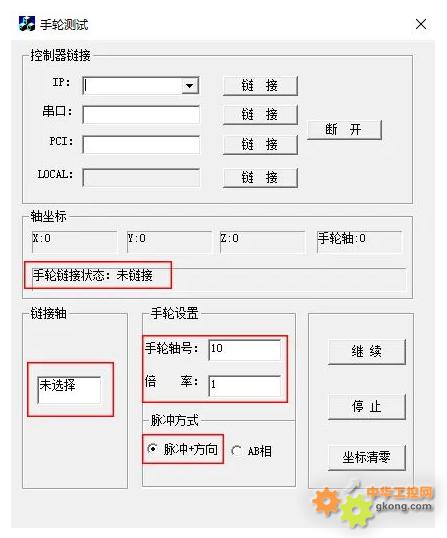
іМРтФЛРРіЙ№¦єу»бПФКѕТФПВЅзГжЈ¬ОґБ¬ЅУїШЦЖЖчЦ®З°Ј¬ЦбЧш±кєНКЦВЦЦбЧш±кД¬ИПОЄ0Ј¬КЦВЦЧґМ¬ОЄ“ОґБ¬ЅУ”Ј¬КЦВЦЦбєЕОЄ10Ј¬БґЅУ±¶ВКОЄ1Ј¬КЦВЦЦбВціе·ЅКЅОЄ“Вціе+·ЅПт”Ј¬БґЅУЦбОЄ“ОґСЎФс”ЎЈ
3.їШЦЖЖчБґЅУ
СЎФсIPЎўґ®їЪЈ¬БґЅУµЅїШЦЖЖчZMC408CE Ј¬БґЅУіЙ№¦Ј¬КЦВЦІвКФФт»б±діЙ“ТСБ¬ЅУ”Ј¬ИфК§°ЬФт»бУРµЇґ°“БґЅУК§°Ь”µг»чИ·¶Ё№Ш±ХµЇґ°Ј¬јмІйIPµШЦ·»тґ®їЪµШЦ·ЦШРВБґЅУЎЈ
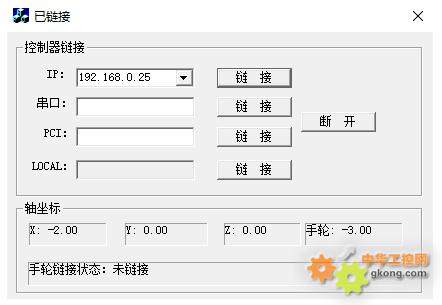
ЈЁБґЅУіЙ№¦Ј©

ЈЁБґЅУК§°ЬЈ©
4.КЦВЦЦбІЩЧч
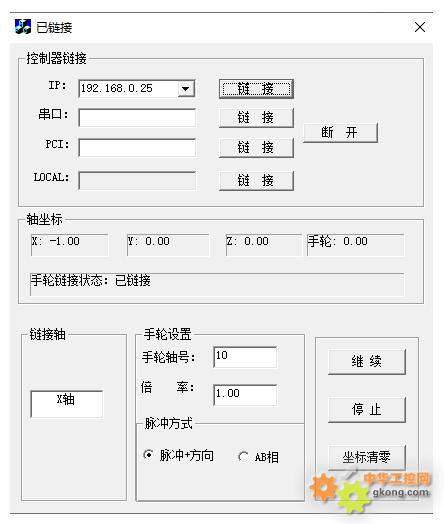
іМРтБґЅУЙПїШЦЖЖчіЙ№¦Ц®єуЈ¬»б»сИЎЦбЧш±кєНКЦВЦЦбО»ЦГЎЈНЁ№эКЦВЦµД“ЦбСЎФс”РэЧЄ°ґЕҐСЎФсБґЅУЦбЈ¬Из№ыБґЅУіЙ№¦Ј¬КЦВЦБґЅУЧґМ¬»б±діЙ“ТСБґЅУ”Ј¬БґЅУЦбТІ»бПФКѕіцЛщБґЅУµДЦбєЕєНБґЅУ±¶ВКЎЈ
Из№ыПлТЄЗР»»Б¬ЅУЦбєНБґЅУ±¶ВКЈ¬Ц»РиТЄРэЧЄКЦВЦ“ЦбСЎФс”°ґЕҐєН“±¶ВКСЎФс”°ґЕҐјґїЙЎЈµг»чНЈЦ№°ґЕҐЦ®єуЈ¬»бЧФ¶Ї¶ПїЄБґЅУЈ¬ґЛК±КЦВЦµД“ЦбСЎФс”єН“±¶ВКСЎФс”°ґЕҐґ¦УЪОЮР§ЧґМ¬Ј¬Ц»УРµг»чјМРшєуІЕ»бЦШРВБґЅУЈ¬ ЅЁТйФЪБґЅУЦбЦ®З°ПИСЎєГБґЅУ±¶ВКЈ¬·сФтїЙДЬ»біцЧІ»ъµДОЈПХЈ¬µг»чЧш±кЗеБгФт»бЅ«XЎўYЎўZЎўКЦВЦµДЧш±кИ«ІїЗеБгЎЈ
5.КЦВЦЦбЦбєЕРЮёД
ґЛАэіМµДКЦВЦЦбЦбєЕ°у¶ЁµЅЦб10Ј¬Из№ыТЄЅшРРРЮёДЈ¬їЙТФФЪКЦВЦЙиЦГЦРµДКЦВЦЦбєЕЈ¬Ц±ЅУЅшРРёьёДЈ¬КЦВЦВціе·ЅКЅТІКЗФЪґЛґ¦ЅшРРРЮёДЎЈ
6.КЦВЦЦбєЕУіЙд
І»Н¬їШЦЖЖчµДД¬ИПКЦВЦЦбЅУїЪІ»Н¬Ј¬ѕЯМеРиТЄІОїјїШЦЖЖчКЦІбЈ¬ПаН¬µгКЗІ»№ЬК№УГДДёцРНєЕµДїШЦЖЖч¶јРиТЄЦШРВЅшРРЦбУіЙдЅ«КЦВЦЦбУіЙдµЅЖдЛыЦбєЕИҐЎЈ
ФЪїШЦЖЖчКЦІбЦРХТµЅД¬ИПКЦВЦЅУїЪЦбєЕЈ¬К№УГZAux_Direct_SetAtypeЈЁhandleЈ¬ЦШУіЙдµДЦбєЕЈ¬0Ј©Ѕ«ЦШУіЙдµДЦбАаРНЙиЦГОЄ0Ј¬»№ФЦбЙиЦГЈ¬ZAux_Direct_SetAtypeЈЁhandleЈ¬ТЄРЮёДµД±ѕµШВціеЦбєЕ,0Ј©Ѕ«ТЄРЮёДµД±ѕµШВціеЦбєЕЦбАаРНТІЙиЦГОЄ0Ј¬µН°ж±ѕІ»ЙиЦГ»б±ЁґнЎЈ
К№УГ±ѕµШЦбУіЙдЦёБоZAux_Direct_SetAxisAddress{ handleЈ¬ЦШУіЙдµДЦбєЕЈ¬(-1<<16) +ТЄРЮёДµД±ѕµШВціеЦбєЕ }ЎЈ

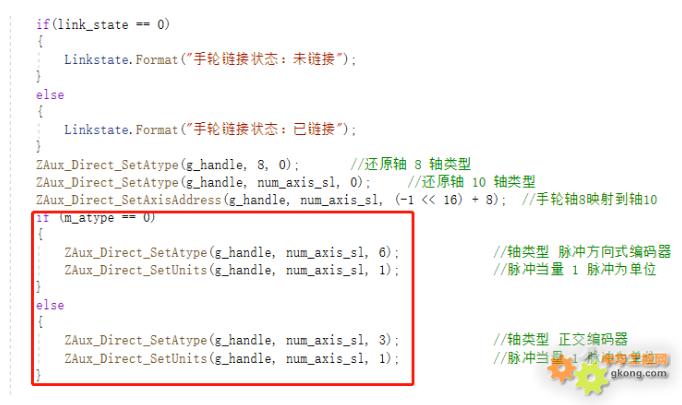
7. КЦВЦЦбІОКэЕдЦГ
ЦбєЕУіЙдІОКэРЮёДНкєуЈ¬ЅУЧЕК№УГZAux_Direct_SetAtype ЈЁhandleЈ¬КЦВЦЦбЦбєЕЈ¬3/6Ј© ЅшРРРЮёДКЦВЦЦбµДАаРНЈ¬ATYPE=3ХэЅ»±аВлЖчЈ¬ATYPE=6Вціе·ЅПт·ЅКЅµД±аВлЖчЈ¬ЙиЦГєГЦ®єуїЙФЪФЛРРЦчЅзГжЅшРРЗР»»ЎЈ
К№УГZAux_Direct_SetUnits ЈЁg_handleЈ¬КЦВЦЦбєЕЈ¬Вціеµ±БїЈ© ёщѕЭКµјКРиЗуРЮёДКЦВЦЦбµДВціеµ±БїЎЈ
8.ЅЁБўКЦВЦБґЅУ
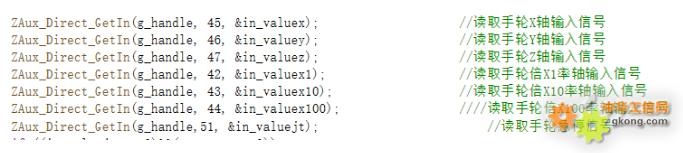
ІйСЇїШЦЖЖчКЦІбЈ¬ХТµЅКЦВЦ¶ФУ¦ЦбКдИлРЕєЕЎў±¶ВКРЕєЕЎўј±НЈРЕєЕЈ¬К№УГZAux_Direct_GetIn ЈЁg_handleЈ¬КдИлїЪ±аєЕЈ¬&»сИЎКдИлїЪµДЧґМ¬ЦµЈ© ЅшРРIOРЕєЕ¶БИЎЈ¬ХвАпФЛ¶ЇЦбКЗXЎўYЎўZ¶ФУ¦їШЦЖЖчµД0Ўў1Ўў2ЦбЎЈ
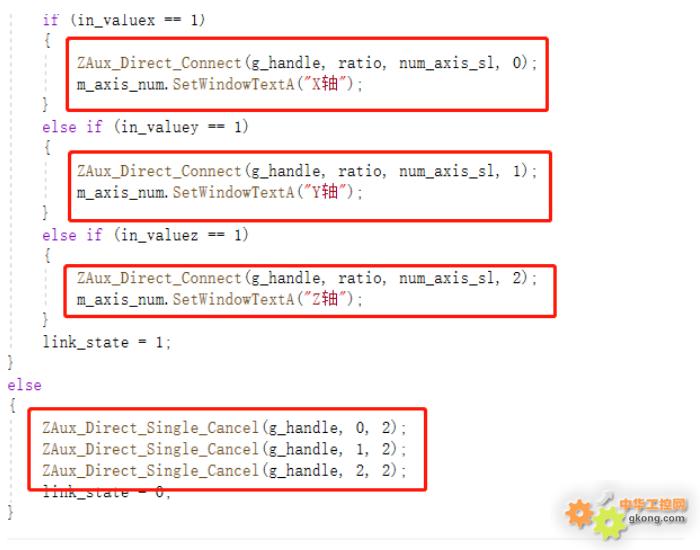
НЁ№эIOРЕєЕµДЕР¶ПК№УГН¬ІЅФЛ¶ЇЦёБоZAux_Direct_Connect ЈЁg_handleЈ¬БґЅУ±ИВКЈ¬КЦВЦЦбЈ¬ФЛ¶ЇЦбЈ© Ј¬ЅшРРЦбµДБґЅУЎў°у¶ЁЈ¬К№УГµҐЦбФЛ¶ЇНЈЦ№ЦёБоZAux_Direct_Single_Cancel ЈЁg_handleЈ¬ФЛ¶ЇЦбЈ¬НЈЦ№ДЈКЅЈ© Ј¬¶ПїЄЦбБґЅУЎЈ
9.КЦВЦЦбО»ЦГ»сИЎЎўЗеБг
ЅЁБўБґЅУЦ®єуЈ¬РиТЄК№УГZAux_Direct_GetMpos ЈЁg_handleЈ¬КЦВЦЦбєЕЈ¬&showpos[КЦВЦЦбєЕ]Ј© Аґ»сИЎЈ¬КЦВЦЦбµДµ±З°О»ЦГЈ¬ІўПФКѕФЪЅзГжЙПЎЈ

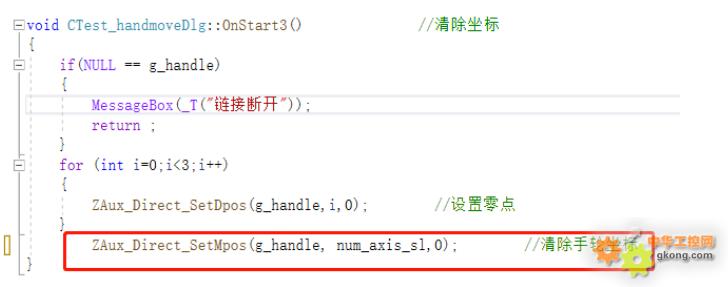
К№УГZAux_Direct_SetMpos ЈЁg_handleЈ¬КЦВЦЦбєЕЈ¬0Ј© ЅшРРКЦВЦЧш±кЗеБгЎЈ

±ѕґОЈ¬ХэФЛ¶ЇјјКх EtherCATФЛ¶ЇїШЦЖЖчФЪКэїШјУ№¤КЦВЦЛж¶ЇЦРµДУ¦УГЦ®C++Ј¬ ѕН·ЦПнµЅХвАп ЎЈ
ёь¶аѕ«ІКДЪИЭЗл№ШЧў“ ХэФЛ¶ЇРЎЦъКЦ ”№«ЦЪєЕЈ¬РиТЄПа№ШїЄ·ў»·ѕіУлАэіМґъВлЈ¬ЗлЧЙСЇХэФЛ¶ЇјјКхПъКЫ№¤іМК¦Јє400-089-8936ЎЈ
±ѕОДУЙХэФЛ¶ЇјјКхФґґЈ¬»¶УґујТЧЄФШЈ¬№ІН¬С§П°Ј¬Т»ЖрМбёЯЦР№ъЦЗДЬЦЖФмЛ®ЖЅЎЈОДХВ°жИЁ№йХэФЛ¶ЇјјКхЛщУРЈ¬ИзУРЧЄФШЗлЧўГчОДХВАґФґЎЈ
ХэФЛ¶ЇјјКхЧЁЧўУЪФЛ¶ЇїШЦЖјјКхСРѕїєННЁУГФЛ¶ЇїШЦЖИнУІјюІъЖ·µДСР·ўЈ¬КЗ№ъјТј¶ёЯРВјјКхЖуТµЎЈХэФЛ¶ЇјјКх»гјЇБЛАґЧФ»ЄОЄЎўЦРРЛµИ№«ЛѕµДУЕРгИЛІЕЈ¬ФЪјбіЦЧФЦчґґРВµДН¬К±Ј¬»эј«БЄєПёчґуёЯРЈРН¬ФЛ¶ЇїШЦЖ»щґЎјјКхµДСРѕїЎЈЦчТЄТµОсУРЈєФЛ¶ЇїШЦЖїЁ_ФЛ¶ЇїШЦЖЖч_EtherCATФЛ¶ЇїШЦЖїЁ_EtherCATїШЦЖЖч_ФЛ¶ЇїШЦЖПµНі_КУѕхїШЦЖЖч__ФЛ¶ЇїШЦЖPLC_ФЛ¶ЇїШЦЖ_»ъЖчИЛїШЦЖЖч_КУѕх¶ЁО»_XPCIe/XPCIПµБРФЛ¶ЇїШЦЖїЁµИµИЎЈ
|

