|
ZMC408CE硬件介绍
ZMC408CE是正运动推出的一款多轴高性能 EtherCAT 总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。

ZMC408CE支持8轴运动控制,最多可扩展至32轴,支持 直线插补 、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。
ZMC408CE支持PLC、Basic、HMI组态三种编程方式。PC 上位机 API编程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC408CE支持8轴运动控制,可采用脉冲轴(带编码器反馈)或EtherCAT总线轴,通用IO包含24路输入口和16路输出口,部分IO为高速IO,模拟量AD/DA各两路,EtherCAT最快125us的刷新周期。
ZMC408CE支持8个通道的硬件比较输出、硬件定时器、运动中精准输出,还支持8通道PWM输出,对应的输出口为OUT0-7,支持8个通道同时触发硬件比较输出。
一、ZCAN扩展模块
ZCAN总线扩展模块包含两个系列: ZCAN扩展模块和ZMIO310-CAN扩展模块,今天我们主要来介绍一下ZCAN扩展模块。
ZCAN扩展模块种类丰富,具体有如下型号。

二、ZCAN扩展模块的接线

1、 CAN总线 上连接了多个CAN通讯模块时,将全部CAN的CANL和CANH端口分别接到一起( CANL接CANL、CANH接CANH)。
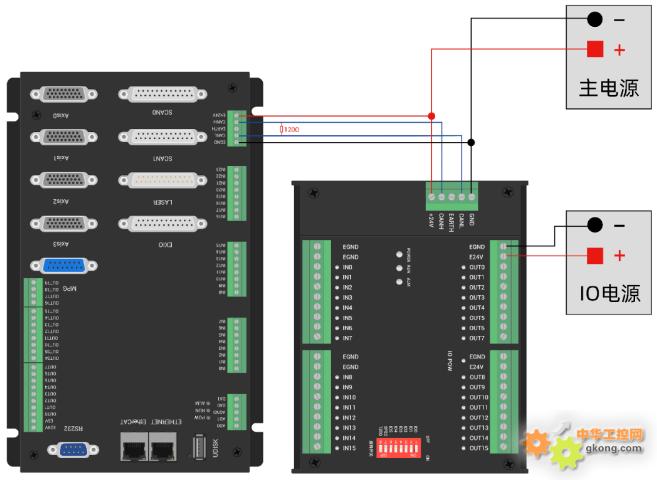
2、在CAN总线最两端接口各并接一个120欧的 终端电阻 ,匹配电路阻抗,保证通讯稳定性。( 控制器/控制卡这一端需要在CANL和CANH之间接入一个120欧电阻,还有最后一个CAN扩展模块需要把[拨码开关8]拨到ON来表示并入一个120欧姆的电阻 )。
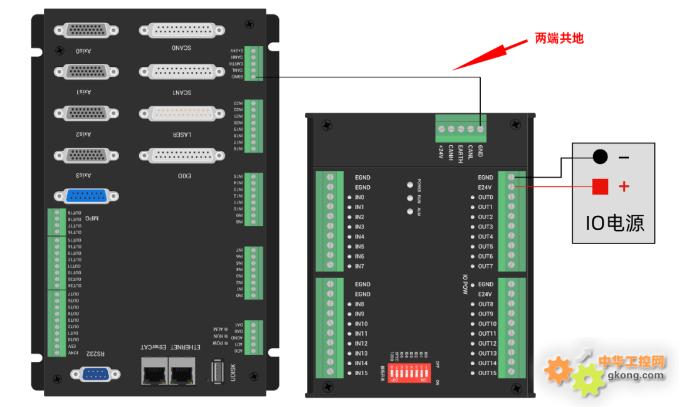
3、要保证控制器的主电源的公共端和CAN扩展模块的主电源的公共端接到一起端( 俗称“共零”),以防止CAN芯片烧坏。
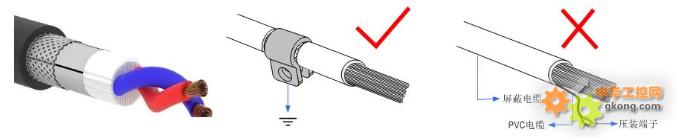
4、干扰严重的场合( 正常接线重启后ZCAN扩展板的ALM灯一直亮着),要将通讯线替换成双绞屏蔽线,屏蔽层可靠接地。
5、ZIO系列扩展模块均采用双电源供电,扩展板的主电源和IO单电源使用两个电源分别供电,这样可以防止IO的干扰传给ZCAN扩展模块的主电源影响通讯。 ZAIO模拟量扩展模块采用单电源供电,只需要主电源,IO不需要单独供电。
6、布线还要注意强电和弱电布线要拉开距离,建议20cm以上。
单电源控制器和扩展模块接线参考
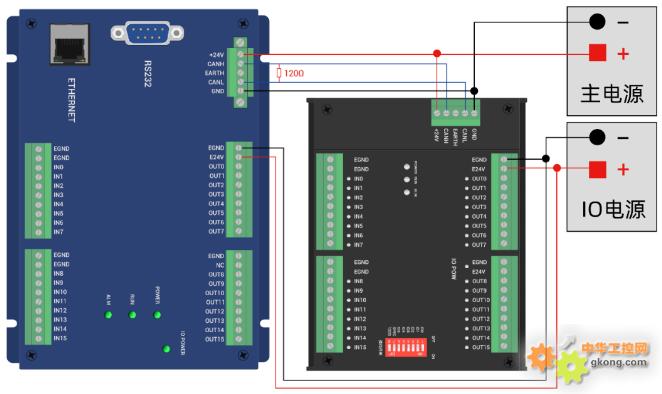
双电源控制器和扩展模块接线参考
三、ZCAN扩展模块的拨码设置

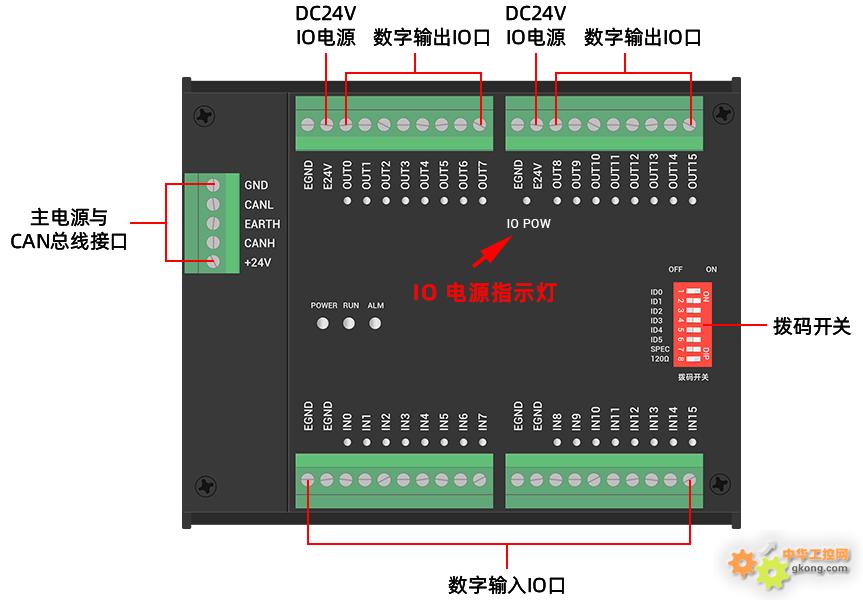
说到ZCAN扩展模块的拨码设置,我们先来了解一下拨码开关,每块ZCAN扩展板都有一个红色的拨码开关,拨码开关具体含义如下。
1、拨码1-4
4位CAN ID(CAN拨码地址)用于ZCAN扩展模块IO地址映射,4位二进制位组合值对应值范围0-15,控制器根据CAN拨码地址来设定对应扩展模块的IO起始地址及AD与DA的起始地址。
不同二进制位组合值对应数字量IO起始编号分配情况如下表。
注: 整个控制系统的IO编号不得重复,映射资源时需避开已有编号。

不同二进制位组合值对应AD与DA的起始地址分配情况如下表。1-4位拨码状态与对应地址ID可参考上表。

2、拨码5-6
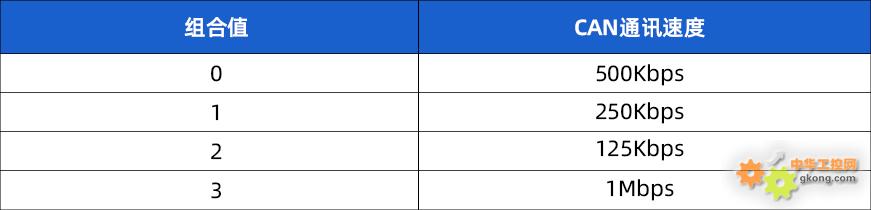
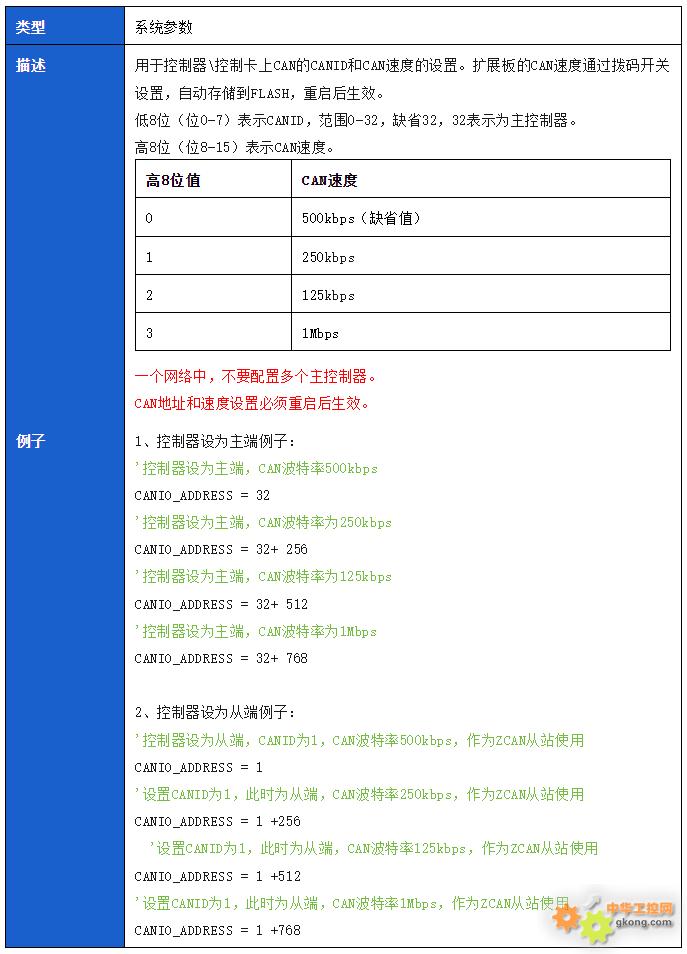
CAN通讯速度,组合值对应值范围0-3,可选四种不同的速度,一般CAN通讯速度默认即可,干扰严重可以降低CAN的通讯速度,同时需要通过控制器端通过CANIO_ADDRESS指令来修改控制器端(主端)的CAN通讯速度与ZCAN扩展模块一致才可以正常通讯。
3、拨码7
特殊功能预留 (ZIO3232MT第7位是拨码前6位的使能,ON时前6位拨码设置生效,OFF时设置不生效);

4、拨码8
120欧电阻,拨ON表示CANL和CANH间并联接入一个120欧电阻,连接了多个CAN通讯模块时只需要把最后一个CAN通讯模块的第8位拨为ON即可。
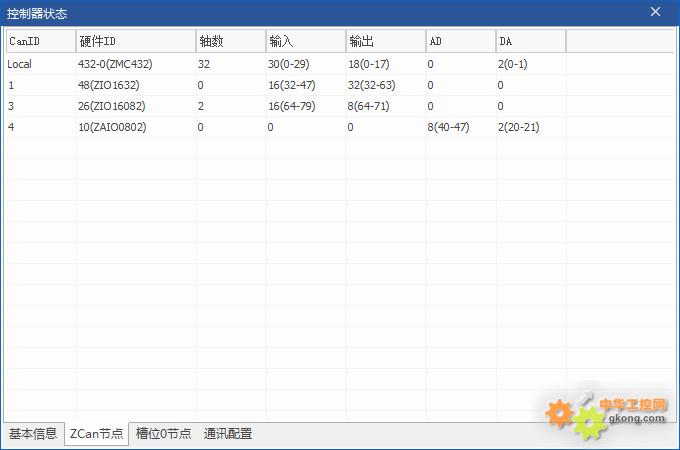
(1)CAN拨码地址的设置,要求整个控制系统的IO 编号不得重复,控制器端本地IO地址的范围可以通过RTSys软件点击【控制器】-【控制器状态】-【Zcan节点】查看相关信息。

上图是ZMC432控制器的本地数字量IO与模拟量IO的分部情况,针对扩展数字量IO的ZCAN扩展模块,我们需要要求ZCAN扩展板的IO起始地址要大于输入口编号的最大值29,同时大于输出口编号的最大值17,查数字量IO组合值对照表得CAN地址拨码的组合值要大于等于1。
(2)CAN通讯速度。一般默认即可,都拨到OFF,此时默认的波特率为500kbps。
(3)特殊功能预留,一般拨到OFF (ZIO3232MT第7位要拨到ON)。
(4)最后一个CAN扩展模块第8位要拨到ON,把末端的120欧匹配电阻加入CAN网络。
完成CAN扩展模块的接线和拨码开关的设置后需要把控制器和扩展模块 断电重启 后生效。
四、ZCAN扩展模块功能验证
1、 断电重启后,观察ZCAN扩展模块的ALM是否熄灭,扩展模块如果和主端控制器正常通讯上的话,ZCAN扩展模块的灯应该是Power[亮]、Run[亮]、Alarm/ALM[灭] ( 下图ALM灯亮表示异常)。
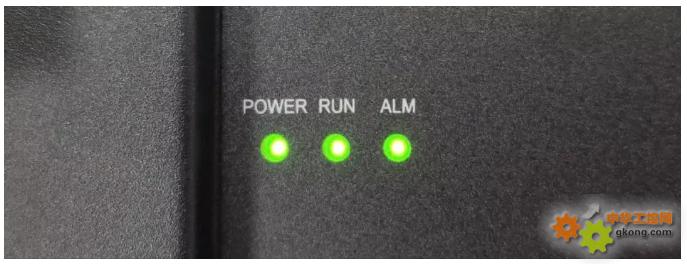
IO的电源是否正常。 (下图IO POW灯亮表示IO供电正常)。

2、 通过RTSys软件点击【控制器】-【控制器状态】-【Zcan节点】可查看到各个ZCAN扩展模块的IO起始编号等信息。
3、ZCAN扩展板IO口监控。RTSys 软件点击【工具】-【输入口/输出口】-【IO选择】,即可监控对应IO口的IO信息。

4、ZCAN扩展板模拟量监控。 RTSys软件点击【工具】-【AD/DA】;即可监控对应的模拟量输入输出口的相关信息,ZAIO0802扩展模块的模拟量输入与输出都是12位的,所以 最大刻度值档位要手动选择4095。

5、ZCAN扩展轴的测试。 CAN总线扩展方式扩展脉冲轴时,可选ZIO16082,扩展两个脉冲轴。 扩展轴需要进行轴映射的操作,采用AXIS_ADDRESS指令映射,映射规则如下。

ID为扩展板1-4位地址拨码的组合值。映射完成后设置ATYPE等轴参数后就可以使用扩展轴。

参考上述例程对ZCAN扩展轴轴号进行映射后,便可点击【工具】-【手动运动】现在对应的轴号,进行左右点动的测试。如果电机运动比较慢看不出来,可以以10的倍数慢慢提升脉冲当量的值,测试看效果。

五、ZCAN扩展模块常见问题分析
常见问题1: CAN扩展模块的Power[亮]、Run[亮]、Alarm[亮]和控制器通讯不上,RTSys软件在【控制器】-【控制器状态】-【Zcan节点】界面也看不到扩展模块的信息。
解决建议如下:
A、参考第二节的接线内容,排查接线的电源是否正常(ZIO模块的主电源是否24V,IO端子的电源是否24V),通过万用表排查导线是否接线良好,是否有接触不良的情况,CAN通讯线缆是否使用双绞屏蔽线,屏蔽层可靠接地,扩展板是否已使用双电源供电。
B、 控制器端是否接120欧电阻,最后面一个扩展模块拨码开关8是否拨到ON。
两端的CAN的地要在同一个地:要保证控制器的主电源的公共端和ZCAN扩展模块ZIO模块的主电源的GND接到一起端(俗称“共零”),同一“地”电势以防止CAN芯片烧坏。
C、 有些扩展模块(例如ZIO3232MT)需要把拨码开关7拨上去才使能,可以把拨码开关7拨到ON,然后断电重启查看。
D、 拨码开关是否设置正确,没有和本体及其他扩展模块有IO地址的冲突。
可以通过RTSys软件点击【控制器】-【控制器状态】-【Zcan节点】可查看到各个ZCAN扩展模块的IO起始编号等信息。
E、 是否存在干扰源,把控制器和扩展模块的所有IO端子及轴接口等其他接线端子排都拔下来,其他无关的设备先断电,然后断电重启看看是否可以通讯上。
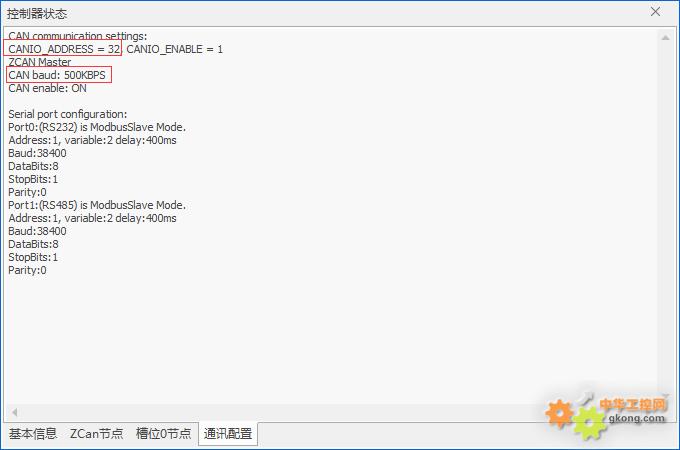
F、 控制器的CAN是否是主端模式(CANIO_ADDRESS的bit5有被置1,例如:CANIO_ADDRESS=32 ),CAN通讯的波特率和扩展模块是否一致。可以通过RTSys软件点击【控制器】-【控制器状态】-【通讯配置】可查看到各个CAN主站设置等详细信息。
G、查看硬件是否被烧坏,可替换控制器及扩展模块测试查看。
常见问题2: 扩展模块有一些IO响应正常,有一些IO响应异常。
解决建议: 通过RTSys软件点击【控制器】-【控制器状态】-【Zcan节点】可查看到各个ZCAN扩展模块的IO编号范围是否有冲突。

六、ZCAN扩展模块相关指令说明
1、 CANIO_ADDRESS -- CAN 通讯设置
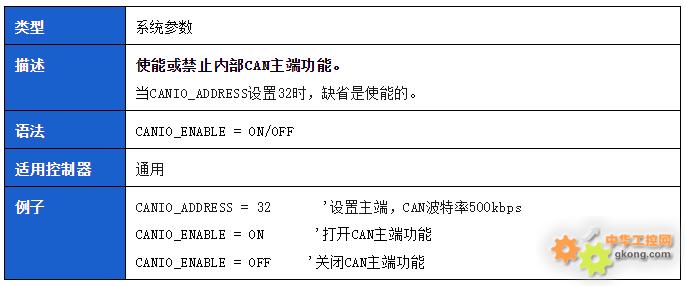
2、CANIO_ENABLE -- CAN使能
3、 CANIO_ STATUS -- CAN 扩展板 通讯 状态 查询

本次,正运动技术运动控制器/运动控制卡配套ZCAN总线ZIO模块的使用 ,就分享到这里。
更多精彩内容请关注“ 正运动小助手 ”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等

|

