|

旋转激光打标与平面激光打标有什么不同?
他们两者的应用对象不同:
平面激光打标:主要作用于平面件,如铭牌,电子元器件等固定表面,激光聚焦在固定平面 + XY工作台,进行平面激光打标。
旋转激光打标:主要作用于圆柱体、圆弧表面等,工件沿圆弧面旋转,激光在曲面中点焦距 + 旋转台匀速旋转,进行沿圆弧面的激光打标。
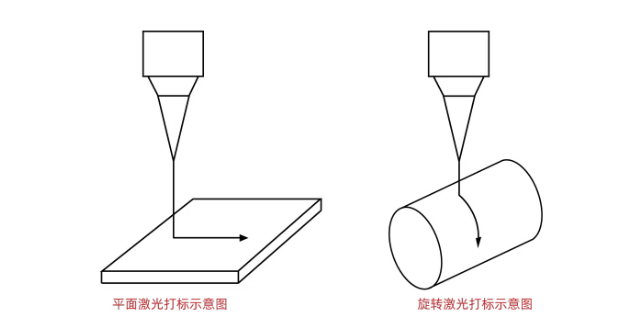
所以当在圆柱形工件的周边进行打标时,由于工件表面呈曲面分布,激光的焦点距离会随之变化。靠近或远离焦点的区域会导致激光能量密度下降,标记深度不均或轮廓失真,影响整体打标质量。
旋转激光打标市场应用
在工业标刻领域,激光旋转打标技术已成为圆柱、圆弧类产品激光标刻的主流方案,能够实现圆柱及弧面工件的360°无死角、高精度、高效率打标。

▌客户现有方案瓶颈
客户现有方案采用振镜旋转分割打标配合卡盘旋转轴,对工件进行分段加工,工件需经过“旋转 → 停止 → 打标”的循环操作,虽然在单段范围内可实现较高的静态标刻精度,但由于频繁启停,导致效率低。
难以满足客户对高节拍和一致性的生产需求,以及在特定场景无法满足360°高速旋转工况下连续打标的工艺需求,导致定位延迟与激光出光不同步的问题,出现打标图像拼接错位、线条重影或激光能量不均等现象,影响激光打标质量。
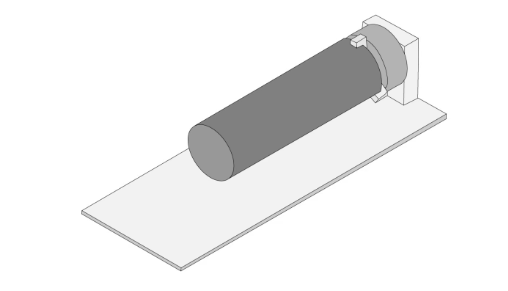
卡盘旋转结构示意图
无论是平面还是曲面皆可使用,轻松提高打标质量与效率!
针对上述痛点,正运动基于激光振镜运动控制器开发了旋转飞行激光打标解决方案。
?
▌正运动技术解决方案:
方案通过内置的多轴联动和PSO功能,可实现旋转轴和振镜进行同步跟踪旋转控制,确保光束能量与运动轨迹高度一致。
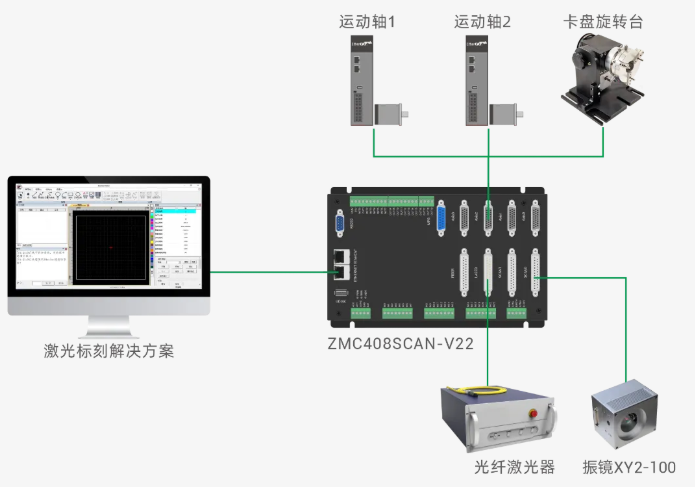
旋转飞行激光打标方案控制架构示意图
在此架构下,工件可在高速连续旋转状态下完成整周打标操作,实现首尾拼接无缝、一次成型,无需启停分段与重新定位,整体加工效率提升3~5倍,拼接误差<10um。
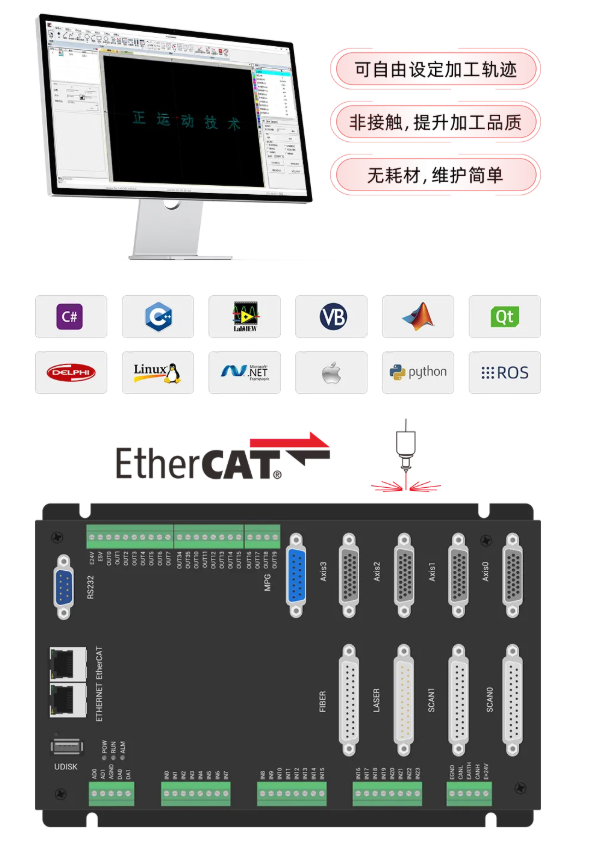
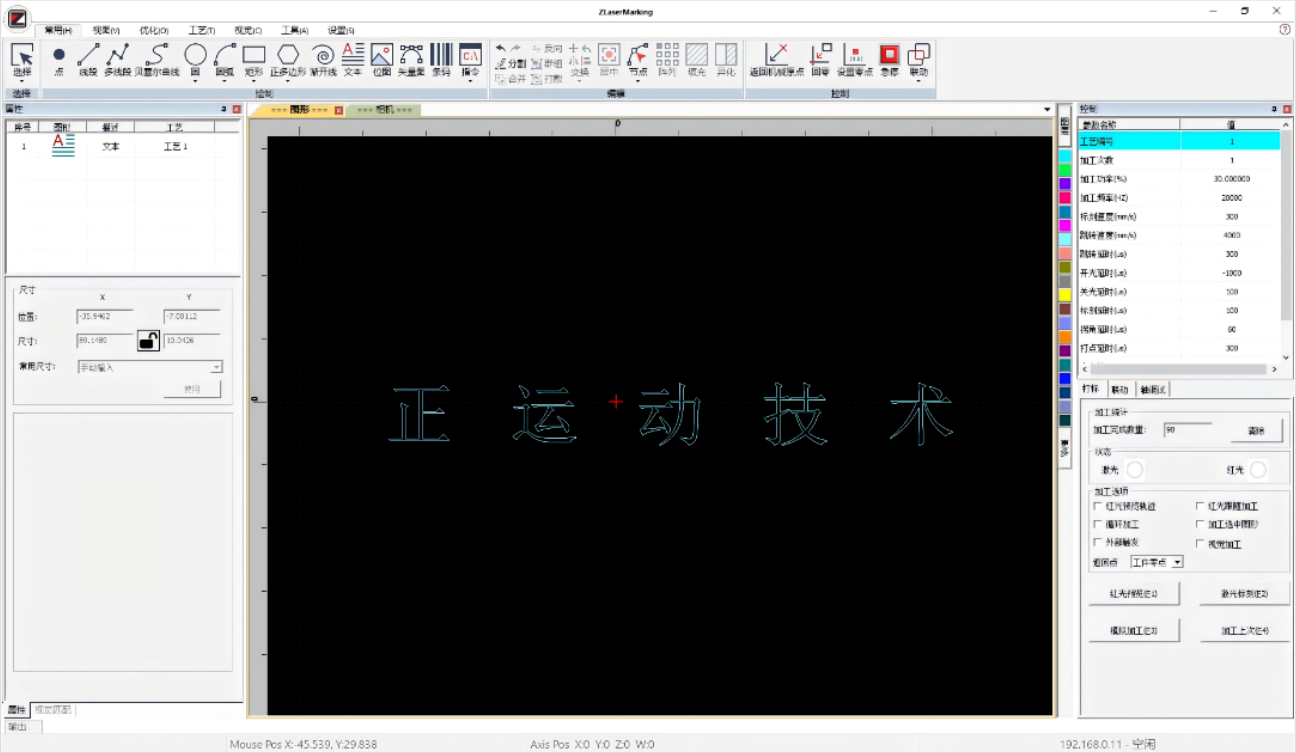
配合正运动技术ZLaserMarking激光标刻软件,用户可调整激光功率、扫描速度、线间距等关键参数,精准控制激光束沿着预设的加工轨迹移动,对指定曲面或平面加工区域进行扫描填充,让激光打标,不再仅限于平面,曲面也行。
该方案无需更换客户现有振镜头与激光器,即可实现效率与打标质量的双重提升,并降低客户二次开发成本与系统集成难度。
关于正运动旋转飞行激光打标运行视频请点击→
开放式激光振镜运动控制器在旋转飞行打标中的应用
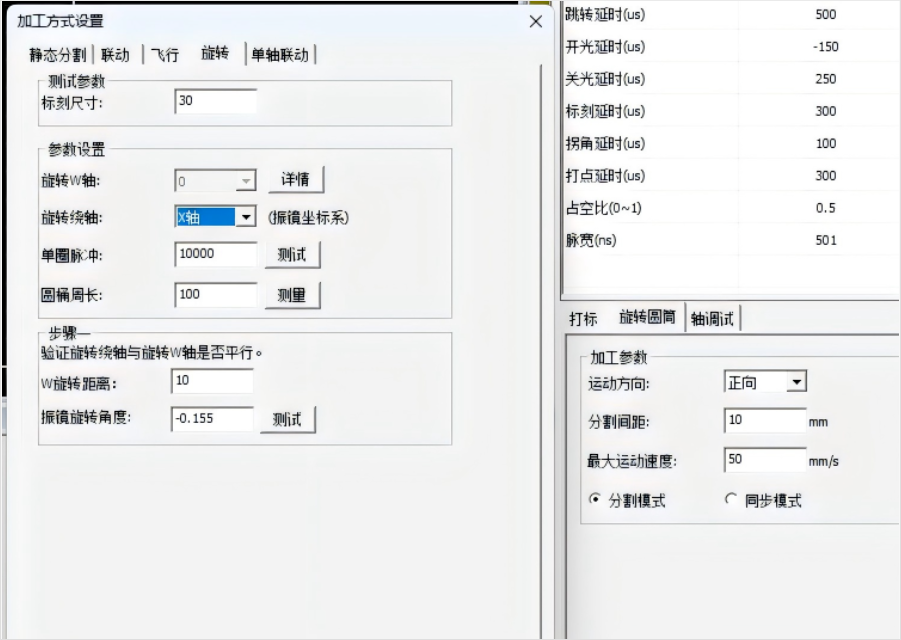
正运动旋转飞行打标方案核心工艺流程
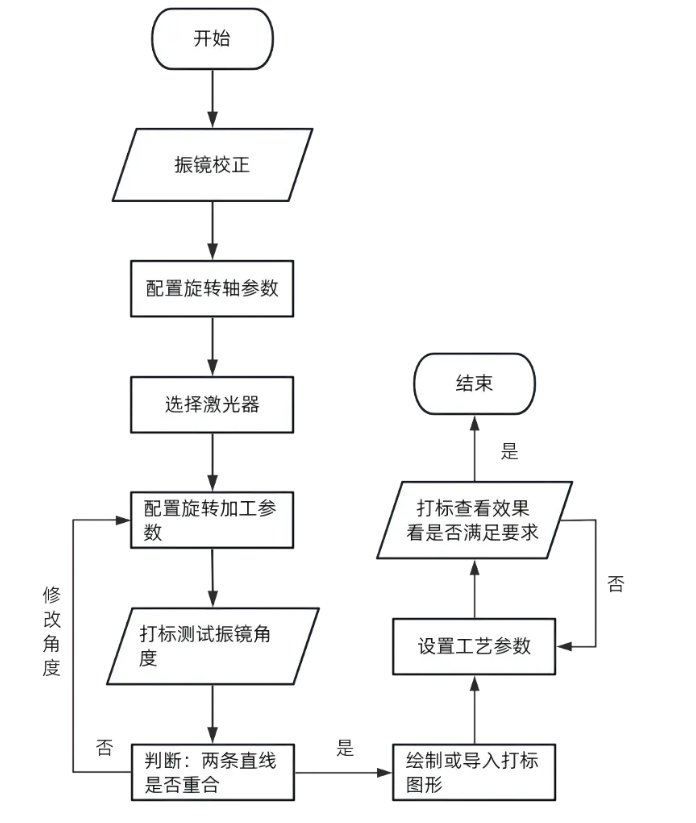
正运动旋转飞行激光打标解决方案,可将圆柱表面360°展开为平面坐标区域,并进行振镜校正,实现旋转轴与振镜的同步跟随控制,在二维平面上实现三维圆柱外表面的连续打标,从而实现整圆连续、首尾无缝的高精度打标效果。
方案支持DXF导图功能与工艺配方快速切换,轻松完成新零件加工。
正运动旋转飞行打标解决方案优势
01 软硬件高度集成
集成激光控制、振镜控制、EtherCAT总线、脉冲、模拟量、高速IO等主流接口,简化硬件架构,有效降低设备控制成本,软件操作便捷,易学易用。
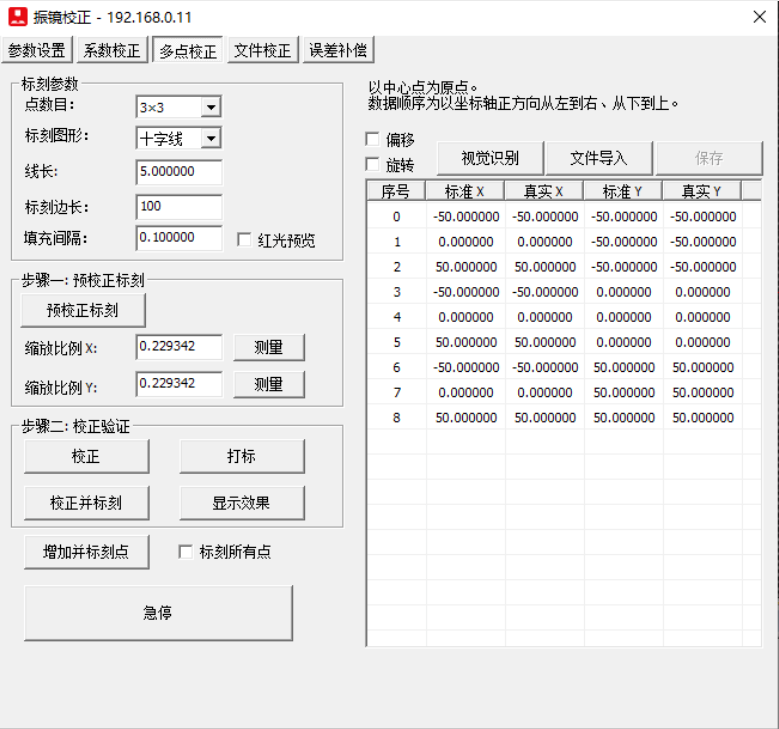
02 高精度振镜校正
支持BOX校正,多点校正功能。选配高精度视觉校正,保证振镜控制精度。
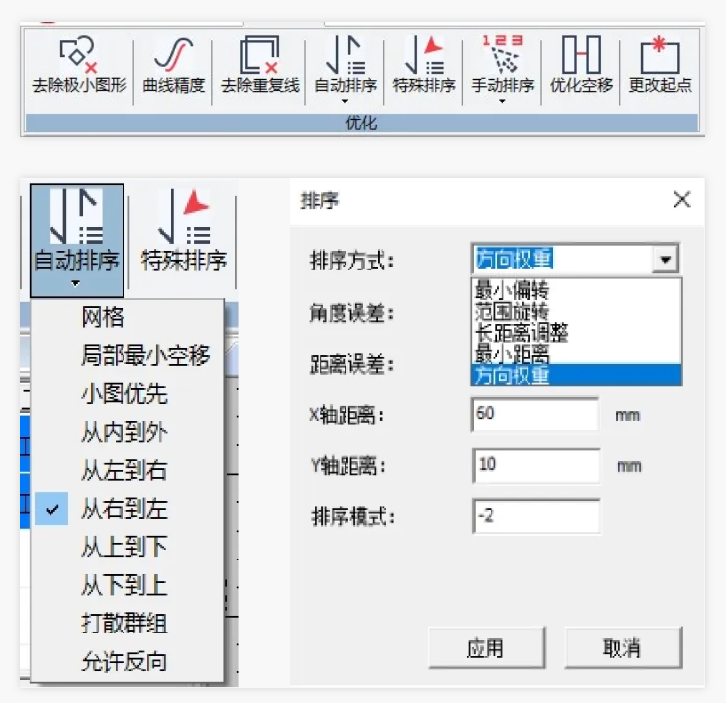
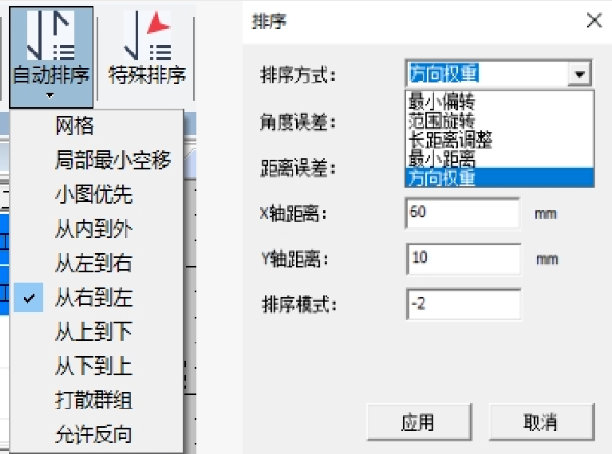
03 智能排版功能
自动计算最短的切割路径,减少不必要的移动,实现设备工作效率最大化。支持主流的设计文件格式(如DXF、AI、SVG等)。
04 图形编辑功能
支持矢量化、图片、文本、条码处理、图形编辑,提供丰富的功能,支持多种文件格式的导入和处理。

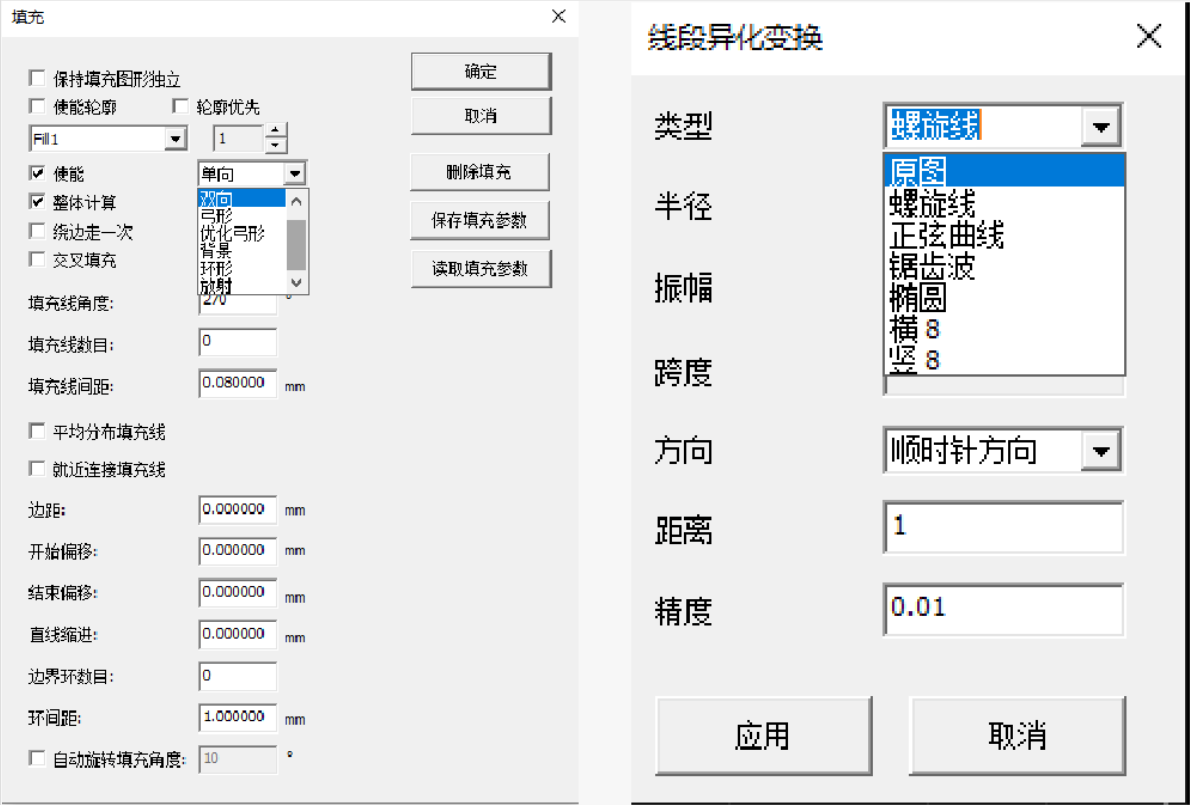
05 丰富的工艺
支持单向、双向、环形、放射等多种轨迹填充方式,正弦、螺旋、8字形等异化曲线工艺,以及加工方式设定等工艺。
06 高精度控制
支持高精度视觉多点振镜校正,伺服轴反向间距、螺距补偿、二维补偿等多种平台校正。
07 灵活二次开发
板卡支持二次开发,提供C++,C#等多种开发方式的专用激光函数库及应用案例。

08 脱机运行,稳定保障
支持脱机控制运行,可加载多个脱机程序,通过IO或API函数灵活触发,确保系统加工过程稳定可靠。
正运动旋转飞行激光打标界面操作视频请点击→
正运动旋转飞行激光打标界面操作视频
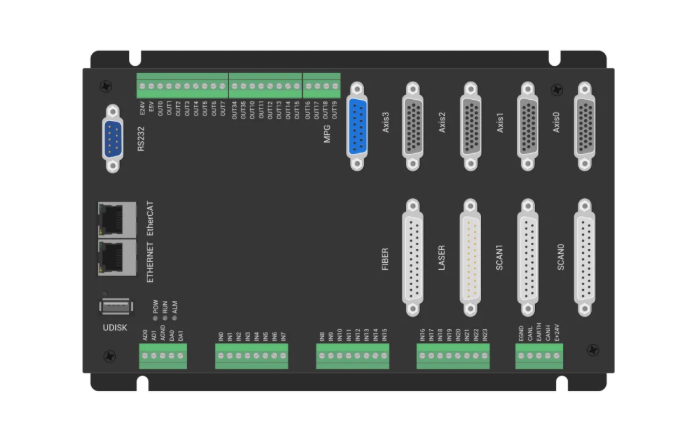
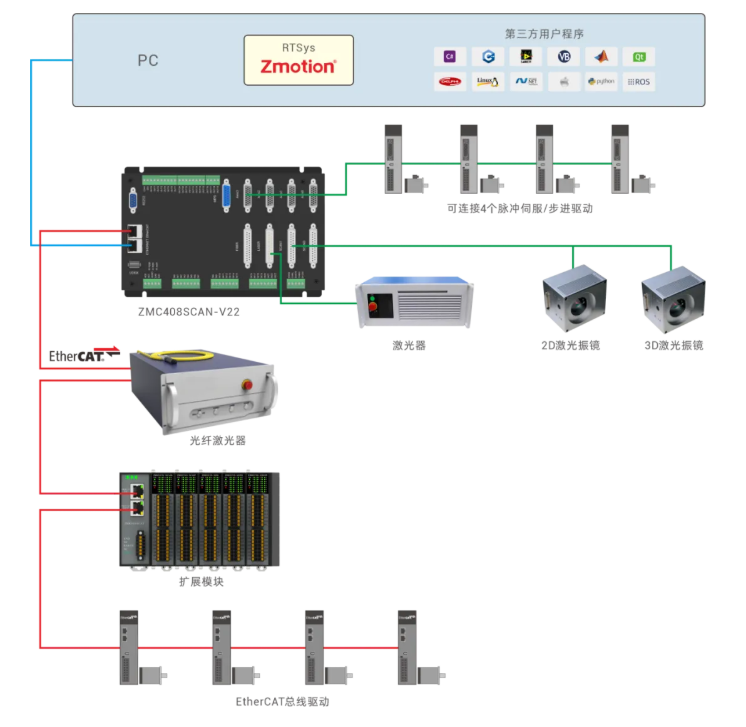
独立式激光振镜运动控制器ZMC408SCAN-V22,集成激光控制、振镜控制和总线轴/脉冲轴控制,助您实现高效精确的EtherCAT总线运动控制+激光振镜解决方案。
- 可选16轴运动控制(脉冲+EtherCAT总线);
- 2路带反馈激光振镜接口、1路LASER和1路FIBER激光电源专用接口;
- 支持一维/二维/三维PSO功能,可做视觉飞拍、精密点胶和激光能量控制;
- 多维位置同步输出PSO,板载24路通用输入和20路通用输出,其中4路高速色标锁存,4路PSO和8路PWM输出;
- 激光振镜控制与运动控制相互融合,可灵活构建多轴联动等方式的激光加工系统。

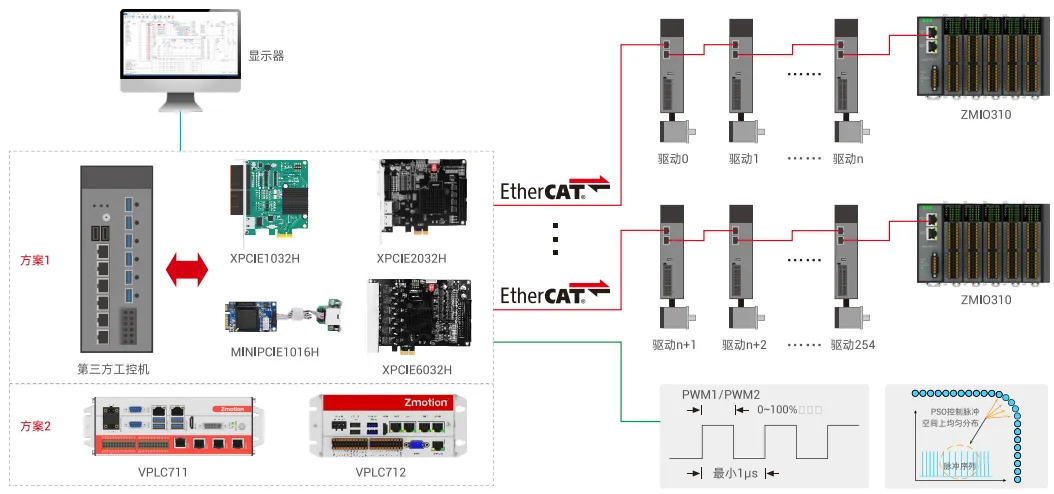
- 可选4-64轴运动控制(脉冲+EtherCAT总线),EtherCAT最小通讯周期250us;
- 内置强实时运动控制内核MotionRT750,支持第三方视觉软件;
- 板载20路通用输入(其中VPLC711的10路和VPLC712的8路为高速输入),20路高速输出;
- 基于x86架构的EtherCAT总线视觉运动控制器,支持脱机运行,内置丰富的视觉和运动控制功能,大幅简化配置流程;
- 支持EtherCAT冗余功能,解决单点故障停机,自动诊断并持续运行,增强系统可靠性,简化维护工作;
- 提供一体化开放式IPC形态的实时软控制器/软PLC集成的视觉+运动控制解决方案。
- x86架构Windows/Linux系统下独占CPU内核的运动控制实时内核。
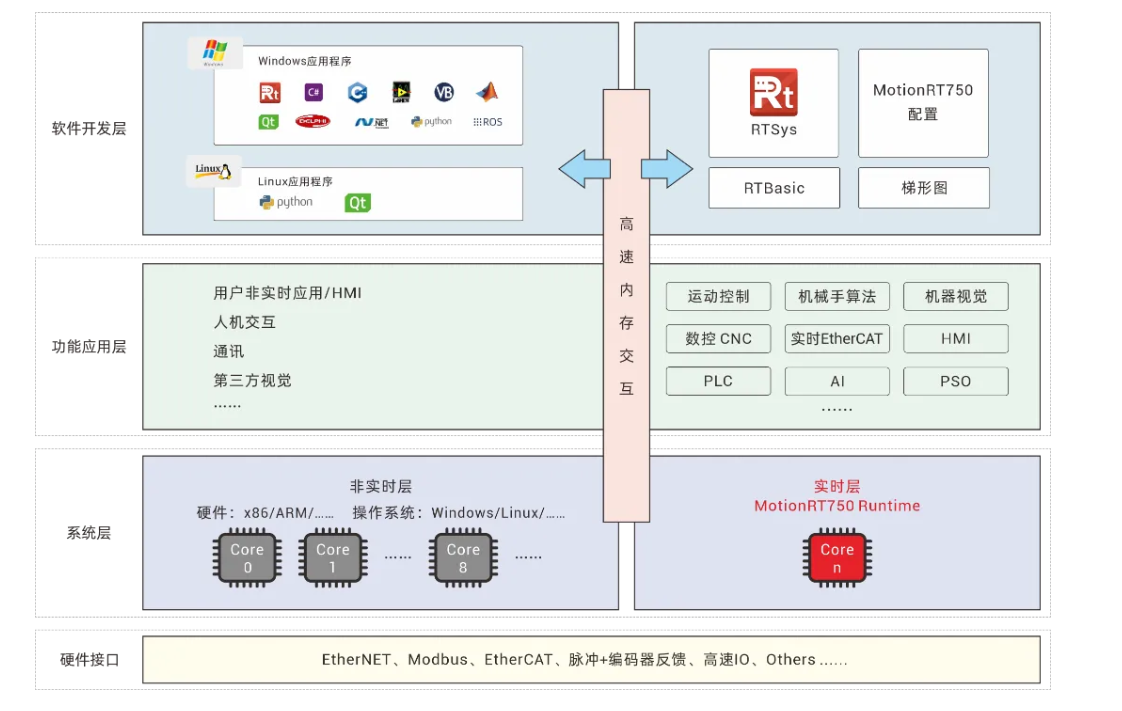
- 支持多达254轴的高精度运动控制,控制周期可低至125us,显著提升设备性能,助力产能提升至少20%。
- 单条指令的交互时间为1-3us,相较于传统的PCI/PCIe、网口等通讯方式,速度提升了10-100倍以上 。

- 搭载环形冗余架构,确保非故障从站持续保持正常EtherCAT通信,可显著提升系统可靠性与运行稳定性。可有效杜绝EtherCAT通讯故障导致的产能损失。
- 当Windows因病毒入侵、硬件异常插拔或驱动冲突导致系统崩溃时,运动控制实时内核 MotionRT750仍可持续运行,且急停功能仍然保持有效,提供充分响应时间进行事故处置,显著提升工业控制安全性与可靠性。

正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等。
|

