|
|
|
��Ʒ���ƣ�
|
��ѡ����Ʋ���
|
|
�� �ţ�
|
|
|
�� ��
|
0.00
|
|
Ʒ �ƣ�
|
������ʿ��(Bosch Rexroth)
|
|
|
|
 �������� ��������
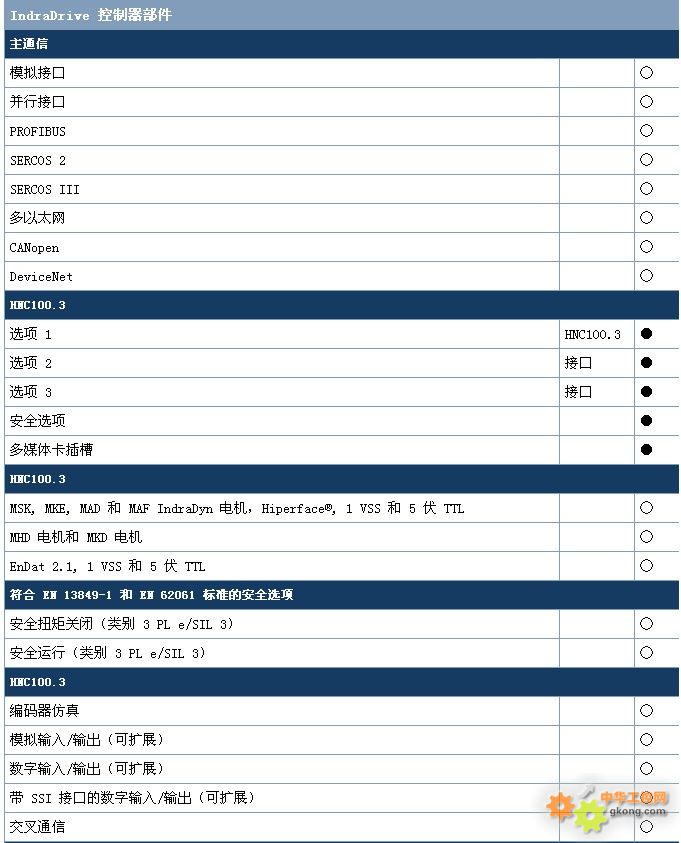
| IndraDrive ���������� |
| ��ͨ�� |
| ģ��ӿ� |
|
◯ |
| ���нӿ� |
|
◯ |
| PROFIBUS |
|
◯ |
| SERCOS 2 |
|
◯ |
| SERCOS III |
|
◯ |
| ����̫�� |
|
◯ |
| CANopen |
|
◯ |
| DeviceNet |
|
◯ |
| HNC100.3 |
| ѡ�� 1 |
HNC100.3 |
�� |
| ѡ�� 2 |
�ӿ� |
�� |
| ѡ�� 3 |
�ӿ� |
�� |
| ��ȫѡ�� |
|
�� |
| ��ý�忨��� |
|
�� |
| HNC100.3 |
| MSK, MKE, MAD �� MAF IndraDyn �����Hiperface®, 1 VSS �� 5 �� TTL |
|
◯ |
| MHD ����� MKD ��� |
|
◯ |
| EnDat 2.1, 1 VSS �� 5 �� TTL |
|
◯ |
| ���� EN 13849-1 �� EN 62061 ���İ�ȫѡ�� |
| ��ȫŤ�عرգ���� 3 PL e/SIL 3�� |
|
◯ |
| ��ȫ���У���� 3 PL e/SIL 3�� |
|
◯ |
| HNC100.3 |
| ���������� |
|
◯ |
| ģ������/���������չ�� |
|
◯ |
| ��������/���������չ�� |
|
◯ |
| �� SSI �ӿڵ���������/���������չ�� |
|
◯ |
| ����ͨ�� |
|
◯ |
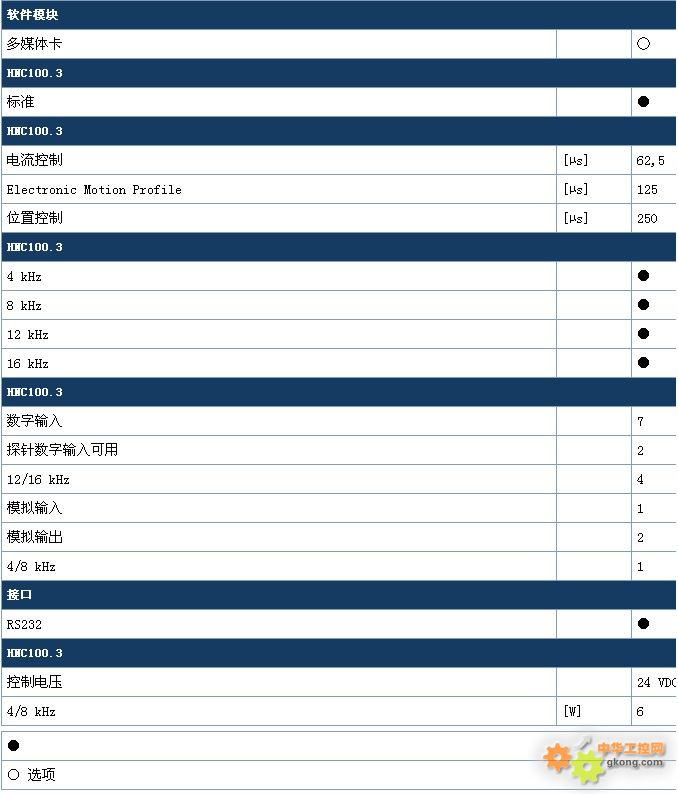
| ����ģ�� |
| ��ý�忨 |
|
◯ |
| HNC100.3 |
| �� |
|
�� |
| HNC100.3 |
| �������� |
[µs] |
62,5 |
| Electronic Motion Profile |
[µs] |
125 |
| λ�ÿ��� |
[µs] |
250 |
| HNC100.3 |
| 4 kHz |
|
�� |
| 8 kHz |
|
�� |
| 12 kHz |
|
�� |
| 16 kHz |
|
�� |
| HNC100.3 |
| �������� |
|
7 |
| ̽������������� |
|
2 |
| 12/16 kHz |
|
4 |
| ģ������ |
|
1 |
| ģ����� |
|
2 |
| 4/8 kHz |
|
1 |
| �ӿ� |
| RS232 |
|
�� |
| HNC100.3 |
| ���Ƶ�ѹ |
|
24 VDC |
| 4/8 kHz |
[W] |
6 |
|
|
|