|
随着科学技术的快速发展,光机电一体化技术应运而生。光机电一体化技术是机械技术、光电技术、电子技术以及计算机技术等群体技术的综合运用。光机电一体化技术涉及机械制造、交通、家电、仪器仪表、医疗、玩具娱乐等众多行业,在工业和经济发展中有着重要的地位。信息、生物、空间、海洋、新材料、新能源等高科技领域,国防装备的信息化、现代化及传统产业的改造都离不开光机电一体化技术的发展。
光机电一体化技术发展迅速,其中各项技术正从原来的技术体系分离出来,具有较强的系统特色和相对独立的研究和应用领域。随着微电子技术和微系统技术的发展,光机电一体化技术的应用与发展进入了一个全新的阶段。机电产品和光机电产品成为家电、医疗器材、玩具等产业的主要产品;光机电一体化技术对于工业设备改造、提高制造装备精度和效率起到了重要的作用;光机电一体化技术在航空航天、国防、智能机器人研制等凸现国家综合实力的科研领域中更是地位突出。
《光机电一体化系统常用机构》一书包括光机电一体化系统常用机构的设计理论、基本构成、机构特点、关键技术、典型案例和应用特性等,其中,既以数控机床、加工中心、三坐标测量仪、工具显微镜、工业机器人、激光打印机等经典光机电一体化产品的常用机构为例,系统介绍了这些产品所含机构的组成特性和应用特点,又以激光切割机、光电经纬仪、车轮和履带式机器人、仿生机器人、CT扫描机、光盘驱动器等新兴光机电一体化装置的实用机构为例,详细分析了这些装置所含机构的组成特性和应用特点,并展示了光机电一体化系统常用机构的新技术和新成果。
1. 形状可变履带机器人
所谓形状可变履带机器人,是指该机器人所用履带的构形可以根据地形条件和作业要求进行适当变化。图8-44所示为一种形状可变履带机器人的外形示意图。该机器人的主体部分是两条形状可变的履带,分别由两个主电动机驱动。当两条履带的速度相同时,机器人实现前进或后退移动;当两条履带的速度不同时,机器人实现转向运动。当主臂杆绕履带架上的轴旋转时,带动行星轮转动,从而实现履带的不同构形,以适应不同的运动和作业环境(见图8-45)。
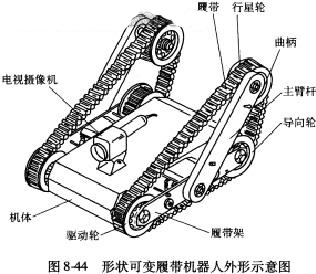
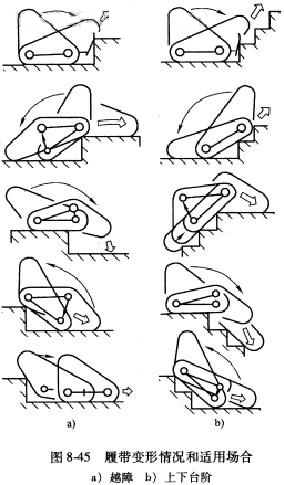
图8-46所示为变形履带传动机构示意图。主电动机带动驱动轮运动,使履带转动。主臂电动机通过与电动机同轴的小齿轮与齿轮1啮合,一方面带动主臂杆转动;另一方面通过齿轮2、齿轮3和齿轮4的啮合,带动链轮旋转;链轮通过链条进一步使安装行星轮的曲柄回转。因为齿轮1和4,齿轮2和3的齿数分别相同,因此齿轮1和齿轮4的转速一致,而方向相反。加上链条两端的链轮齿数相等,使得主臂电动机工作时,主臂杆转过的角度与曲柄的绝对转角大小相等、方向相反。
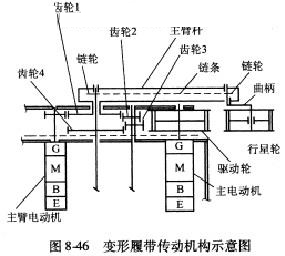
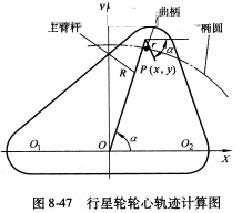
图8-47为行星轮轮心轨迹计算图,由图可以导出该行星轮轮心P点的运动轨迹满足下式:
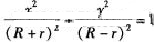
(84)
显然,式(8-4)是一个标准椭圆方程,这说明该机器人的履带在任何形状时都能保持松紧程度不发生变化。
2. 位置可变履带机器人
所谓位置可变履带机器人,是指履带相对于车体的位置可以发生变化的履带式机器人。这种位置的改变既可以是一个自由度的,也可以是两个自由度的。图8-48所示为一种二自由度变位履带机器人,各履带能够绕车体的水平轴线和垂直轴线偏转,从而改变机器人的整体构形。
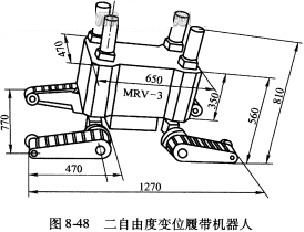
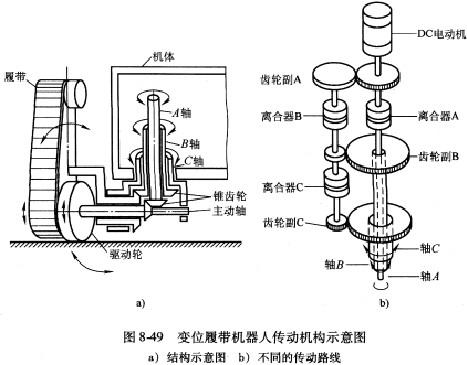
图8-49为上述变位履带机器人传动机构示意图。由图8-49a可知,当A轴转动时,通过一对锥齿轮的啮合,将运动传递给驱动轮,从而带动履带运动;当B轴转动时,通过另一对锥齿轮的啮合,带动与履带架相连的曲柄,使履带绕主动轴轴线回转变位;当C轴传动时,履带连同其安装架一起绕C轴线相对于车体转动,改变其位置。A、B、C三轴由一台电动机带动,通过切换A、B、C三个离合器,使之实现不同的传动路线,具体情况参见图8-49b。
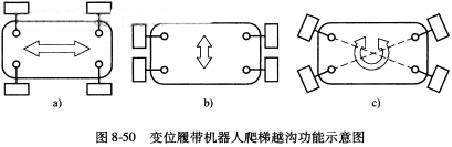
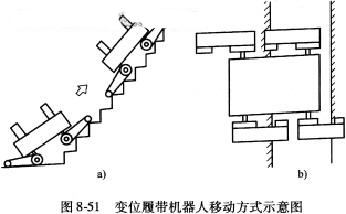
变位履带机器人集履带式机器人和全方位轮式机器人的优点于一身。当其履带沿一个自由度方向变位时,可用于攀爬阶梯和跨越沟渠(见图8-50);当其履带沿另一个自由度方向变位时,可实现车体的全方位行走方式(见图8-51)。
|

