����1. ����
�����������Ӿ��ŷ�ϵͳ�ǻ����������е���Ҫ�о�������Դ��80����������ż����������ͼ�����������������۵ķ�չ��ȡ���˺ܴ��������һЩϵͳ��Ͷ��ʹ�á��Ӿ��ŷ���ͨ����˵�Ļ����Ӿ�������ͬ���Ӿ��ŷ������û����Ӿ���ԭ��������ͼ����Զ���ȡ��������ֱ�ӵõ���ͼ����������Ϣ�У����ٽ���ͼ�������ھ����̵�ʱ���ڸ��������źţ����ɻ����˵�λ�ñջ����ƣ�ʵ�ֶԻ����˵Ŀ��ơ���������ϵͳ��ʵ��ij�ֿ���ΪĿ�ģ������Ӿ��ŷ�ϵͳ�е�ͼ�������̱������ȷ��������Ҫ��Ի������Ӿ��ŷ�ϵͳҪ�����ȷ���ص㣬Ϊ������Ŀ�о�����Ҫ�������о��˻���DSP��ͼ�����������Ӿ��ŷ�������
����2 . ϵͳ����ԭ����Ӳ������
��������ͼ����Ӿ��ŷ�ֱ�Ӽ���ͼ�������������źţ����任���������˶��ռ䣬������е�֣�����ŷ����÷����Ա궨���Ϳռ�ģ�������С�
�������ڻ������Ӿ��ŷ�ϵͳ,ʵʱ������һֱ��һ�����Խ������Ҫ���⡣ͼ��ɼ��ٶȽϵ��Լ�ͼ������Ҫ�ϳ�ʱ����ϵͳ�������Ե�ʱ��;�����Ӿ���Ϣ������Ҳ����������ϵͳ�ļ���������ͼ�����ٶ���Ӱ���Ӿ��ŷ�ϵͳʵʱ�Ե���Ҫƿ��֮һ��
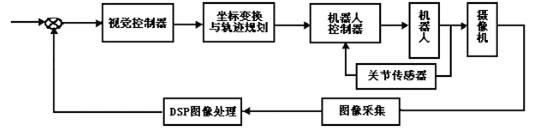
����ʵʱͼ������Ƶ��ѵ������������ʱ������ɶԴ���ͼ�����ݵĴ��������˵��Ӿ����۷�����ֻ��ͼ����ϵͳ�Ĵ����ٶȴ�ÿ��25֡����ʱ���ܴﵽʵʱ��Ч������Ҫ��ʵʱͼ����ϵͳ������40ms����ɶ�һ֡lͼ������㴦�������ܱ�֤ͼ���ʵʱ�ԡ�Ϊ�˴ﵽ�ô����ٶȣ����Dz����˻���DSP��ͼ���Ӿ��ŷ���ʽ����ṹ��ͼ1��ʾ��
ͼ1 ����DSP��ͼ�����������Ӿ��ŷ��ṹͼ
����2.1 WTC6201PA����
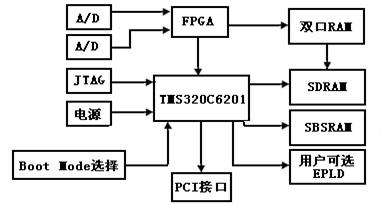
��������ѡ������ͤ��˾��WTC6201PA�壬�����Ӳ�������ͼ2��ʾ������
ͼ2 WTC6201PA��Ӳ�����
����WTC6201PA������EVM���е�һ�֣���������TI��˾��DSP����TMS320C6201оƬ��TMS320C6201оƬ�����ʱ��Ƶ��Ϊ200MHZ��ÿ��ʱ������������ִ��8��ָ��Ӷ�ʵ��16000MIPS�Ķ�������������������������Ҫ�ص㣺
���������������Ĺ������߽ṹ�������ij������ߡ��������ߺ�DMA����ʹ��ȡָ����д���ݺ�DMA�������Բ��С�
����������ˮ�ߴ�����ʹ����������ͬ�IJ��������ص�ִ�У�����˳���ִ���ٶȡ�
�������и����ܵ��ⲿ�洢����չ�ӿ�EMIF������ֱ����ͬ��ͻ����̬�洢��SBSRAM��ͬ����̬�洢��SDRAM���ӣ����ڴ����������ٴ洢;������ֱ���첽�洢���ӿڣ����뾲̬�洢��SRAM��ֻ���洢��EPROM���ӣ�����С���������ݴ洢�ͳ���洢;оƬ�ڲ����ɵ�64K����洢�������ó�CASHE������߳���ִ��Ч�ʡ�
����16λ�������ܹ�������CPU�Ĵ洢���Լ���Χ��·����ͨ�š��Ҷ�ͨ��DMA����������û��CPU�������������ӳ��洢�ռ��е����ݰ��ƣ��Ӷ�����CPU�Ĺ�������
����ͬʱ���������˸���ͬ���洢��SBSRAM��128K��32Bit����SDRAM��4M��32bit������·A/Dת��������������FPGA�������ⲿI/O�ӿڣ����ϻ��ṩ��һ��McBSP�ӿڣ�����5V TTL��ƽ�������û����ⲿϵͳͨ�š�WT6201PA������PCI Local Bus Revision 2.1 Э�飬�����ɷ���DSP��������Դ���û���ͨ���������س���WTC6201PA���ṩ��Win98��NT�µ�����������DSP��Ӧ��������APIs�����������Ӳ��ƽ̨�͵ײ������⣬�û����Ժ����Ľ�������������
����2.2 ϵͳӲ��ʵ��
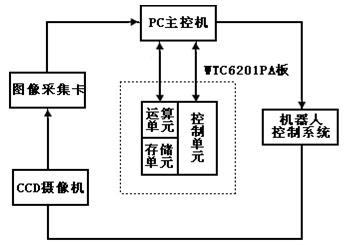
��������ѡ����WTC6201PA���ϵ�TMS320C6201оƬ��FPGA��SBSRAM��SDRAM��˫��RAM��PCI���ߡ�JTAG�ӿڵ�Ӳ����Դ��Ϊ�Ӿ�ͼ������Ԫ����PC���ػ���ͼ��ɼ�����CCD������ͻ����˿���ϵͳ���ϵͳ��ԭ����ͼ��ͼ3��ʾ��
ͼ3 ϵͳԭ����ͼ
����ϵͳ�����������£�
����CCD������������ʽ��ȫ�����źţ����а�����ͼ���źš�����ͬ���źš��С��������źš��������ǰ���������������źš���ϵͳ�����˱�����㹫˾��DH-PCI-Hͼ��ɼ�����ʵ����Ƶ�źŵ�Ԥ������CCD���������Ƶ�������뵽ͼ��ɼ�����ͼ��ɼ��������趨�Ĵ���λ�á���С�ͷ�ʽ�ɼ���Ƶ���ݣ��ɼ������ݴ洢�ڼ�������ڴ��С�ͼ������ͼ���Ƶģ�����CPU���룬ͼ�����ٶȿɴ�40MB/S��
��������ͼ��ɼ����IJɼ���ʽ��25֡/s�����ɼ�����ɼ�һ֡��ʱ��Ϊ40ms��ÿһ֡ͼ������ż������ɣ���ƵΪ50HZ����һ��ɨ��ʱ��Ϊ20ms��ͼ��ɼ���СΪ512��512���أ�����Ϊ8bit��256�Ҷȼ�����һ֡ͼ���������Ϊ512��512��8bit=256KB��ͼ�����ݴ洢��ʽΪ���д�ţ����桢ż����ͼ�����ݽ����ţ����һ֡����ͼ������
����C6201��BOOTMODE[4:0]����оƬ���Ծٷ�ʽ�����ع��̲���������HPI��������ʽ���ⲿ����ͨ�������ڳ�ʼ��CPU�Ĵ洢�ռ䣬����������еij�ʼ���������ڿ��ƼĴ����е�DSPINTλ����Ϊ1�������������̡�CPU�˳���λ״̬����ʼִ�е�ַ0����ָ�
����ϵͳ�ϵ��������HPI�ڶ�ϵͳ��ʼ������Ҫ��ɶԸ��Ĵ��������ã�����EMIF���жϡ�DMA����صļĴ�����ʼ�������ȡ�������HPI���ƼĴ�����DSPINTλд1����DSP���У�ϵͳ����ȴ�״̬��CCD�����ʵʱ�ɼ�ͼ��ͼ��ɼ���������洢�������ڴ档PC���ڴ滺����һ֡��������DSP���ж��źţ�DSPӦ���ͨ��PCI���߽�ͼ�����ݴ������ڴ澭HPI�ڴ��䵽WTC6201PA��Ƭ��SDRAM��DSP���Ʋ��ŷ�Χ��ͼ��������DMA��ʽ���䵽�ڲ����ݴ洢��������DSPΪָ��ṹ����оƬ�����пɱ���Ժá����Դ�����������ָ��ɳ���RAM��ַ�ռ�Ĵ�С���������ŵ㣬�����FPGA�����䴦���ٶȱȽ���;��FPGAΪ�ɱ�������������к�ǿ��ϸ���Ȳ��д����Ͷ༶��ˮ�ߴ��������������ڲ���������Դʹ֮���ʺ�ʵ�ָ��������㡣������Dz���FPGA��ΪЭ����������ɵײ����������DSP��ɸ߲���������ֲ������Բ�����ˮ�ߵķ�ʽ�������У���ͬ��ɸ���ͼ��������FPGA��DSP֮���ͼ�����ݴ���ʹ��˫�˿�RAM��������һ֡ͼ���DSP����������Ϣ������Ӧ���ͼ���������PCI���ߴ�����PC���ڴ棬PC���ٽ�λ��ƫ�������ź������ŷ�����ϵͳ������ŷ�����
����3 ͼ���ſɱȾ���
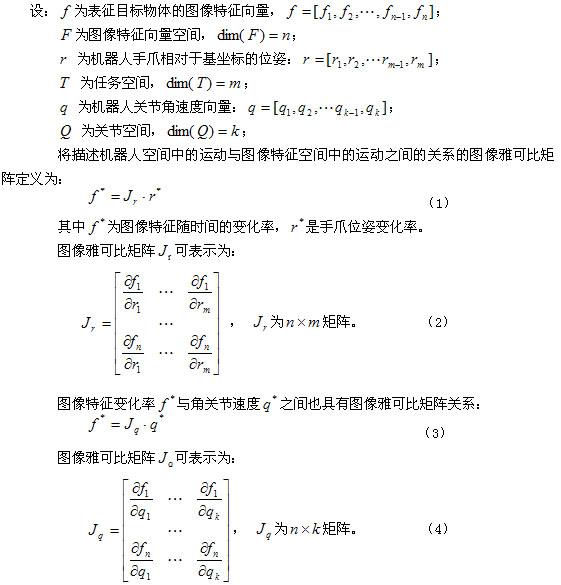
��������ͼ�����������Ӿ��ŷ�ϵͳ���ƻ�����ͼ���ſɱȾ����Ǻܹؼ��ģ��������˻����˿ռ��е��˶���ͼ�������ռ��е��˶�֮��Ĺ�ϵ������
����ʽ ��2������4����ͼ���ſɱȾ�������ֱ�ʾ��ʽ���ǻ���ͼ�������Ӿ������о��Ļ�������Ҫָ�����ǣ�Ϊ��ȷ���õ�Ψһ��ͼ������ʸ����ͼ�������ռ�ά��Ӧ�ô��ڻ����λ�˿ռ�ά����n�Rm����
��������ͼ���ſɱȾ���ķ��������߹��Ʒ������鷽����ѧϰ���������߹��Ʒ�ͨ����̬����õ�ͼ���ſɱȾ���;���鷨����ͨ���궨������ģ��֪ʶ�õ�ͼ���ſɱȾ���;ѧϰ������Ҫ������������ʾ�̺������緽���õ��ſɱȾ���
��������
�������ķ����˻������Ӿ��ŷ�ϵͳ�Ļ���ԭ����������˻���TMS320C6201�Ϳɱ��������FPGAЭ�����ṹ���Ӿ�ϵͳ��ʵ����ͼ��ɼ���ͼ��Ŀ���ʵʱ��������ʵ������������������Ƶ��Ӿ�ϵͳ������ʵ��ƽ̨��ͨ��ʵ����֤������Ƶ��Ӿ�ϵͳ����������Ӿ��ŷ�ϵͳ��ʵʱҪ��