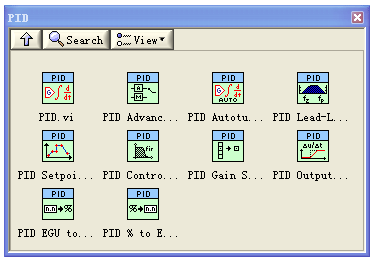
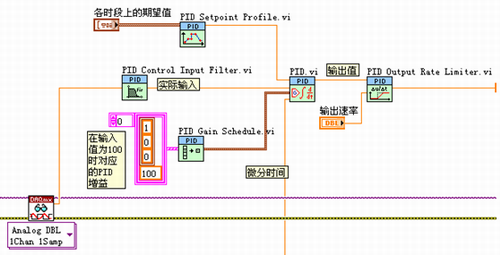
PID Lead/Lag.vi可以对PID控制器前端由系统反馈来的输入信号做动态补偿。PID Setpoint Profile.vi可以在期望值间断性变化时使其变得平滑。PID Control Input Filter.vi是一个五阶的低通滤波器,放在PID控制器的process variable前端,可以滤去小于采样率十分之一的输入值。 PID Gain Schedule.vi可以写入几组增益参数,并给出条件,执行时当输入信号达到条件,便使用对应的一组参数给入到PID控制器的PID Gains上。PID Output Limiter.vi对PID控制器输出信号的变化速率进行控制,以保证外部接受控制信号部件的安全。PID EGU to %.vi和PID % to EGU.vi负责对实际数值和其在设定工程单元范围内占的百分比进行转换。