|
李定军
关键词:PID控制;LabVIEW;NI DAQ设备
在自动控制中,一个系统的运行要求能够满足给定的性能指标,具有抗干扰能力和稳定性。对于被控制的对象,其本身的物理结构和工作过程是一定的,在给定信号作用时,对象的输出并不一定能满足系统的性能要求,所以需要加入一个控制器。控制器与被控对象以闭环的形式构成系统,以帮助整个系统的输出满足给定的性能指标,而控制器运用的控制规律多种多样。
PID(Proportional Integral Derivative比例微分积分)控制是控制工程中技术成熟,应用广泛的一种控制策略,它经过长期工程实践,已形成了一套完整的控制方法和典型的结构。
PID控制
PID控制器结构简单、稳定性好、工作可靠、调整方便。当被控对象的结构和参数不能完全被掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。因此当我们不能完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,就是PID的用武之地(图1)。
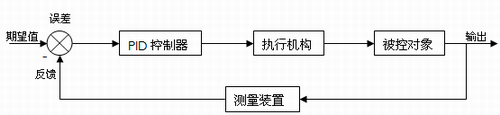
图1 PID控制系统
PID顾名思义,就是根据系统误差利用比例,微分,积分计算出控制量进行控制。比例,积分,微分这三个环节又相互独立,有各自不同的作用,在现场也可以根据实际情况来选择使用。
P控制(比例控制)
如果控制器的输出仅仅与误差成正比关系,即u(t)=Kpε(t),便构成了一个比例控制器,可见比例控制器实际上是一个增益可调的放大器(图2)。比例控制器通过改变比例放大系数Kp调节输出,对误差的反应很快,但是其输出与期望值之间总是存在一个稳态误差,必须使用手动复位来消除,在实际运用中很不方便。提高Kp值可以增加系统的开环增益,使稳态误差减小,还能够增加系统的快速性;但容易使系统的稳定程度变差,振荡变多。而当Kp值小时,又会使系统动作变得缓慢,所以校正系统很少单独使用P控制。
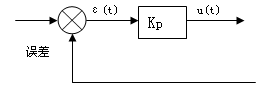
图2 比例控制
I控制(积分控制)
由于P控制存在稳态误差需要手动复位,人们发现可以通过引入一个积分项来消除稳态误差。积分控制器的输出与误差信号的积分成正比,即  ,所以PI控制器的输出有: 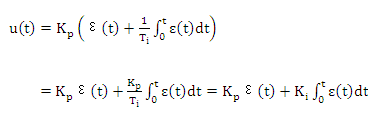
(式1)
积分项对误差进行积分,随着时间的增加积分项增大,只要误差还存在,就会不断输出。这样,即便误差很小,积分项也会随着时间的增加而加大,推动控制器的输出增大使稳态误差进一步减小,直到等于零,以达到消除稳态误差的目的。因此,PI控制器,可以使系统在进入稳态后无稳态误差。但是对时间的积分必将影响系统的快速动态性能,对于一些系统会出现超调过大的现象,严重的甚至引起系统崩溃。
D控制(微分控制)
积分控制的动态性能不好,而微分项恰好可以弥补这点。微分控制器的输出和误差信号的微分成正比,即  ,所以PD控制器的输出有: 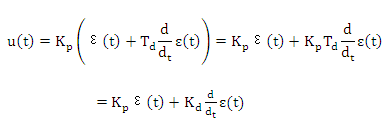
(式2)
微分作用反映的是误差信号的变化率,所以对系统控制具有预见性,能预见误差的变化趋势,因此能产生超前的控制作用。甚至在误差形成之前,可能已被微分调节作用消除。所以如果微分时间选择合适,可以减少超调和系统调节时间,使系统的动态性能大大提高。微分控制在实际运用中经常用来抵消积分控制产生的不稳定趋势,但因其反应的是误差的变化率,所以仅对动态过程作用,通常不单独使用。而且微分控制对噪声干扰有放大作用,过强地调节微分项对系统抗干扰能力不利。
PID控制
PID控制即比例控制、积分控制、微分控制的组合,综合了3种控制器的优点。在实际运用中,有时也不需要用到全部的3个部分,只有比例控制单元是必不可少的。对于PID控制器,输出为:
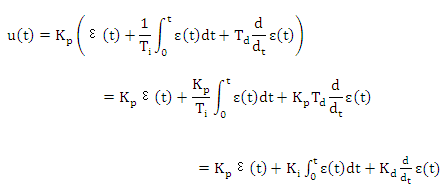
(式3)
PID控制实际就是根据经验,对Ki,Kd这3个参数进行整定,以得到合适的输出值对系统进行控制。具体如何整定,根据不同的现场有所不同。目前PID不仅应用广泛,发展也很快,已研究出很多对这3个参数进行自整定的智能控制器。在和计算机这样的数字控制器结合后,还出现了数字PID的设计方法,不过具体原理还是遵循于传统。
|

