|
引 言
控制器是智能机器人处理和控制信息的主体,它直接决定了机器人的行为和性能。近几年来随着高性能微控制器和嵌入式系统技术的不断进步,为各类实时控制应用提供了解决方案。
嵌入式系统(ES)是计算机技术、通信技术、半导体技术、微电子技术、语音图像数据传输技术,甚至传感器等先进技术和具体应用对象相结合后的系统,其是硬件和软件紧密捆绑在一起的系统。将嵌入式系统应用于灭火机器人的设计中,对机器人的性能智能化、网络化、小型化都有了明显提高。
比赛用灭火机器人需要机器人有智能较高的自动控制性能与可靠的机械控制性能的同时保证,才能在短时间内准确寻找到火源并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火机器人进行了设计。本文将从硬件和软件方面讲述智能灭火机器人控制器的实现方法,并且给出了机器人灭火的具体实验,验证了方案的可行性,为智能灭火机器人的进一步研究提供了平台。
1 灭火机器人的描述
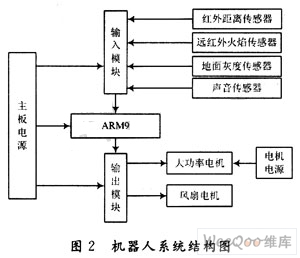
灭火机器人的外形结构如图1所示,它的主要构件有:红外发射传感器(6个),红外接收传感器(6个),声音传感器(1个),灭火风扇(前后各1个),远红外火焰传感器等(前后各7个)。其中红外发射和接受传感器的配合使用可以使机器人自动避障行走。远红外火焰传感器可以检测光的强弱,用于判断房间是否有火以及趋光灭火。声音传感器用于启动。基于实践,风扇灭火更为可靠,所以选用风扇灭火。
?
?
3 灭火机器人嵌入式系统硬件设计
3.1 控制器系统设计
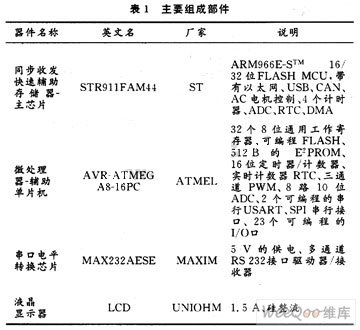
由于嵌入式微处理器对实时任务具有很强的支持能力,可以完成多任务并且具有较短的中断响应。因此在设计过程中,采用嵌入式ARM9为核心的控制器(ST公司的STR911FAM44),实现了以极少的周边芯片获得齐全的功能。ARM9处理器具有体积小,功耗低,性能高的特点。它集成了28路模拟信号采集通道,可以兼容数字信号和模拟信号,每路精度为10位,因此可以分辨3 mV特的输入电压变化。8路高速数据采集通道每秒可采集50万次信号。该处理器内部采用哈佛结构,每秒可执行1.1亿条机器指令,这样的强大功能可以实现机器人高速精确地按照规定路径行走,并且机器人的CPU能够实时迅速地读取多个传感器端口数值,在较短的时间内完成对各端口数值的存储、运算和输出等多种任务。在主控制器核心CPU的基础上,将各种功能模块、执行机构等连接到CPU的引脚上。控制器总共有28路模拟采样接口。ARM9控制器的系统图如图3所示。
(3)若正前距离很大,右前距离适中,就直行;
6 结语
实际测试证明该设计的灭火机器人能够较好完成灭火任务,具有一定参考和使用价值。该设计的创新之处为:以AM09为核心的嵌入式系统的控制器运行速度高,能够高速采集和处理传感器系统信号,并发出相应的控制信号,实现8 s内完成任意房间灭火;该设计采用了嵌入式系统内核,大大提高了机器人处理信号的能力;STR911FAM46和AVR-ATMEGA8-16PC的选用在实现了功能强大的同时,保证了良好的扩展性,并且成本较低,有利于智能机器人早日实现市场化;双电源供电系统的引入,使机器人的运行更加稳定可靠;通过沿墙行进规则的设计,机器人的灵敏度和适应外界变化的特性明显提高,且程序简捷,有利于模块化编程。
|

