|
堆取料机是一种用于大型干散货堆场既能堆料又能取料的连续输送的高效装卸机械。堆取料机的种类很多,常用的有:斗轮堆取料机、门式滚轮机及装卸桥、圆形堆取料机。
常用的取料机料场分为:圆形料场、条形料场。
圆形料场具有中心固定立柱的圆形封闭结构,适用于场地有限且环保要求高的场景,如城市周边电厂、水泥厂。存储易扬尘或需防潮的物料,如煤粉、矿粉。
条形料场采用长条形布局,可露天,可半封闭设计,适应不同环境需求。适用于场地开阔且需要频繁扩容的场景,如港口、钢铁厂。存储大宗低价值、耐候性强的物料,如铁矿石、砂石。

斗轮堆取料机常用于条形煤场,他由斗轮挖掘机演变而来,19世纪30年代德国最早研究斗轮挖掘机,第一台斗轮挖掘机于19世纪80年代问世,真正投入使用在20世纪初。1916年世界第一台在德国贝格威茨褐煤露天矿开采和剥离,它是第一台在煤矿使用的轨道行走式斗轮取料机。
随着全球范围内基础设施建设需求的增加,如公路、桥梁、码头和矿山等项目,堆取料机的需求也相应增长。这些机器在大型基础设施项目中起到重要作用,用于高效处理和储存散料物料。矿山和冶金业是堆取料机的重要应用领域。随着全球对矿产资源的需求增加,矿山和冶金业的发展也带动了堆取料机市场的增长。
自动化和数字化技术的广泛应用为堆取料机行业带来创新机遇。集成传感器、人工智能和数据分析等新技术可以提高设备的自动化水平、运行效率和安全性,满足行业对智能化物流处理设备的需求。
在新兴市场中,工业和基础设施建设需求日益增长,为堆取料机行业提供了巨大机遇。这些市场的经济增长和城市化进程推动了基础设施的增加投资,促进了堆取料机市场的扩展。
武汉正向科技通过自主研发、积极探索智慧料场技术实现真正意义上的堆取料机无人值守。
堆取料机无人值守系统
- 移动设备定位系统(格雷母线精确定位,角度传感器)
- 堆形扫描采集系统(激光雷达扫描、3D相机成像)
- 虚拟三维图像重构系统(图形处理算法)
- 防碰撞系统(设备与堆料,设备与设备之间放碰撞)
- 作业规则库系统(自动转换成设备操作指令)
- 物料信息跟踪管理系统(物料品种、数量、堆放区域等)
- 智能化调度系统(作业流程推荐、作业指令生成)
移动设备定位系统(格雷母线精确定位,角度传感器)
格雷母线技术为非接触式连续测量,检测精度1mm,行走误差在1cm内,回转误差在0.1°以内。格雷母线内部采用刚性内胆,实现取料机走行位置与回转位置的精确检测,解码器采用32位ARM处理器,自带RJ45接口,支持EtherNet/IP、PROFINET等工业总线通讯协议。该设备维护简便,精度高,防尘防水,无累计误差。
通过走行、回转、俯仰的位置检测,实现堆取料机的三维坐标定位。
堆形扫描采集系统(激光雷达扫描、3D相机成像)

堆取料机悬臂两侧各安装一台激光扫描仪,激光扫描仪采集数据通过以太网传送。
&激光雷达专用云台

激光扫描及三维成像软件的算法及执行效率是本系统的核心,其特点具有:高时效性、垛型边界的动态探测与刷新、具有处理大量三维冗余数据的技术。
&三维成像技术
在作业过程中,利用不同类型堆取料机的不同机车姿态信息,启动安装在悬臂前方的激光扫描仪对料堆进行动态扫描,并对获得的激光数据进行预处理、坐标转换、网格规范化处理、插值处理后生成规则的三维数字化料场高程模型( digital elevationmodel,DEM) 。
 
【C型料场自动化堆取料机系统软件】
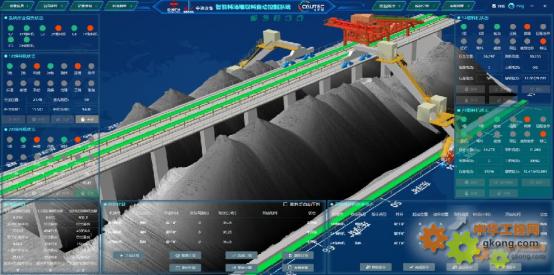
特点:
- 具备对堆取料机的远程手动控制、半自动控制和自动控制,以及各状态信号和报警信号的显示
- 对料场进行数字化建模,具备点云3D显示,盘库(库存/体积计算),基于三维模型计算堆取料机的开层位置、俯仰高度/角度的精度高。
- 对有水汽、灰尘等恶劣环境,造成点云噪声大的场景进行了点云滤波、修复,保障三维建模的准确性。
- 系统接入皮带安全联锁控制,且在皮带上方接入了激光雷达流量监测,实现恒流量取料反馈控制。
|

