

柔性机械手视觉供料解决方案,提升无序分拣效率!
http://www.gkong.com 2025-10-09 17:05 深圳市正运动技术有限公司

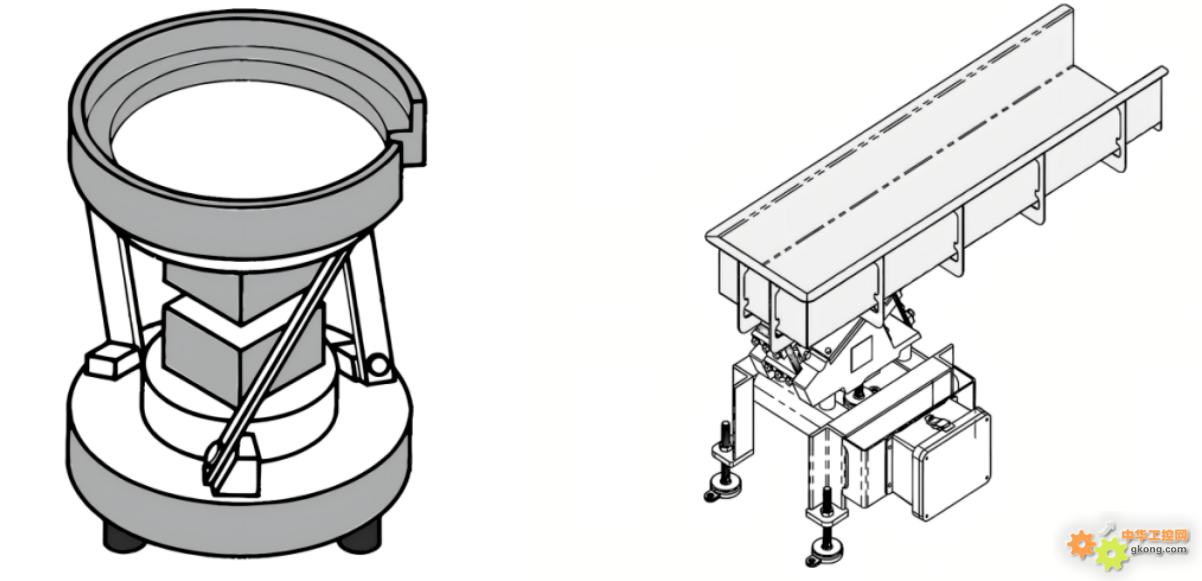
传统振动供料系统结构
这些问题正在导致工厂面临巨大的生产损失!
在实际生产中,传统供料方式在应对零件无序堆叠和多品种、复杂形态零件时,常常面临效率低、换型慢、成本高、周期长、柔性差、依赖人工等问题。通过客户现场的对比数据显示:

柔性供料市场导读
柔性供料站融合机器视觉、柔性振动盘与机械手等技术,构建柔性自动供料系统,可替代传统供料方式,能够满足小批量共用、多品种快速切换需求,从容应对高混料生产模式的持续挑战,并适用于对表面防损伤、防变形的精密零部件,实现均匀分布与柔性上料的需求。

▌ 柔性供料客户核心诉求
随着3C消费电子、电子半导体、汽车零部件、5G通讯等行业对柔性化生产的需求不断攀升,柔性供料正逐渐成为生产线的标准配置方案。如何在此基础上进一步实现更高的UPH与精度、加快方案交付与缩短工期,已成为核心用户关注的焦点。
● 现有方案的痛点:
在设备商与系统集成商的实际应用中,为了满足这些需求,往往需要堆叠多套硬件架构、配置多套软件界面。这种方式虽然功能齐全,却让系统变得复杂,终端操作人员使用门槛升高,难以实现真正意义上的“傻瓜化”操作模式。
● 打破壁垒,深度耦合创造价值:
只有通过将供料、视觉与机械手控制进行高度一体化,才能够为用户的产线导入更稳定、易用、高效、通用化的解决方案。

▲市面上常见机械手柔性供料方案配置▲
当供料系统、视觉与机械手不再为各自而战,柔性供料才真正实现快、准、稳!
基于市场需求,正运动依托VPLC系列机器视觉运动控制一体机,推出柔性机械手视觉供料解决方案,从根本上突破了传统柔性供料的“刚性”限制。

▌ 正运动解决方案
识别率≥99%,UPH提升10%-20%,换型时间缩短60%,重复定位精度:±0.02mm。
正运动打破局限,方案将“柔振供料+视觉+机械手控制”进行软硬深度耦合,既简化了系统集成,又增强了组件间的互操作性,实现真正的无缝运行控制,让产线具备“感知-决策-执行”的闭环控制,零件无论以何种姿态堆放,都能被视觉系统精准定位,并完成下发指令给机械手完成柔性上料操作,大幅提升无序分拣效率。
方案支持DELTA、SCARA、XYZR等多种机械手模型算法,已在多个细分行业广泛应用,为用户提供更易用、高效、稳定、通用的解决方案。
▲SCARA结构机械手柔性供料运行视频▲
▲DELTA结构机械手柔性供料运行视频▲
▲XYZR结构机械手柔性供料运行视频▲
正运动解决方案核心工艺流程:视觉+运动控制闭环

这一闭环工艺让零件从“无序”到“有序”,真正实现快、准、稳的柔性供料与分拣。
方案可保存多物料的视觉与运动控制配置,一键切换工艺包。新零件仅需更换识别模板或参数,无需重新设计治具,即可大幅缩短换型周期、提升进给速度,减少停机时间并提高生产效率,轻松满足多品种、小批量、多批次订单的柔性生产模式需求。
正运动柔性机械手视觉供料解决方案优势
01 软硬件高度集成
集成IO控制、机械手控制、机器视觉、运动控制与通讯于一体,无需额外配置工控机、机器人控制电柜箱、降低成本的同时提升设备安装空间,缩短项目开发周期与技术维护难度。

02 功能操作简单
易于理解和快速掌握的调试界面,将机械手调试、机器视觉调试、柔振盘调试等功能集成在一个页面。面向多品种小批量的物料,实现高效快捷产品换型。

03 一键快速生成视觉模板
快速搭建视觉工具流程,无需编写复杂的 上位机视觉代码。通过拖拽视觉工具完成功能实现,框选式建模板使用更加简单。

04 工艺功能丰富
支持阵列摆盘、定点供料、自定义装配、盘中盘阵列、圆型摆盘、下相机飞拍、皮带动态抓取、圆形柔振盘动态抓取等,满足市面上常见应用需求。

05 多结构柔性供料
支持市面上常见的XYZR模组机械手、DELTA并联机械手、SCARA机械手等,同一套柔性视觉供料解决方案界面,根据应用场景不同,选择相应结构。

06 自定义功能扩展
支持用户使用 Basic语言、HMI组态实现自定义功能拓展,周边附加轴与IO逻辑控制。修改部分非标动作工艺完成。

▲正运动柔性供料解决方案界面操作运行视频▲
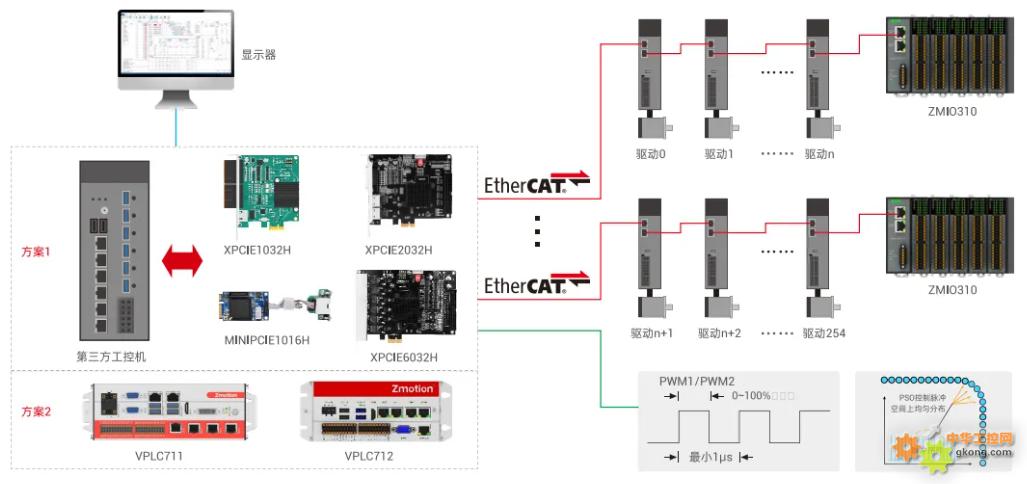
一、机器视觉运动控制一体机VPLC7系列

-
可选4-64轴运动控制(脉冲+EtherCAT总线),EtherCAT最小通讯周期250us;
-
内置强实时运动控制内核MotionRT750,支持第三方视觉软件;
-
板载20路通用输入(其中VPLC711的10路和VPLC712的8路为高速输入),20路高速输出;
-
基于x86架构的EtherCAT总线视觉运动控制器,支持脱机运行,内置丰富的视觉和运动控制功能,大幅简化配置流程;
-
支持EtherCAT冗余功能,解决单点故障停机,自动诊断并持续运行,增强系统可靠性,简化维护工作;
-
提供一体化开放式IPC形态的实时软控制器/软PLC集成的视觉+运动控制解决方案。
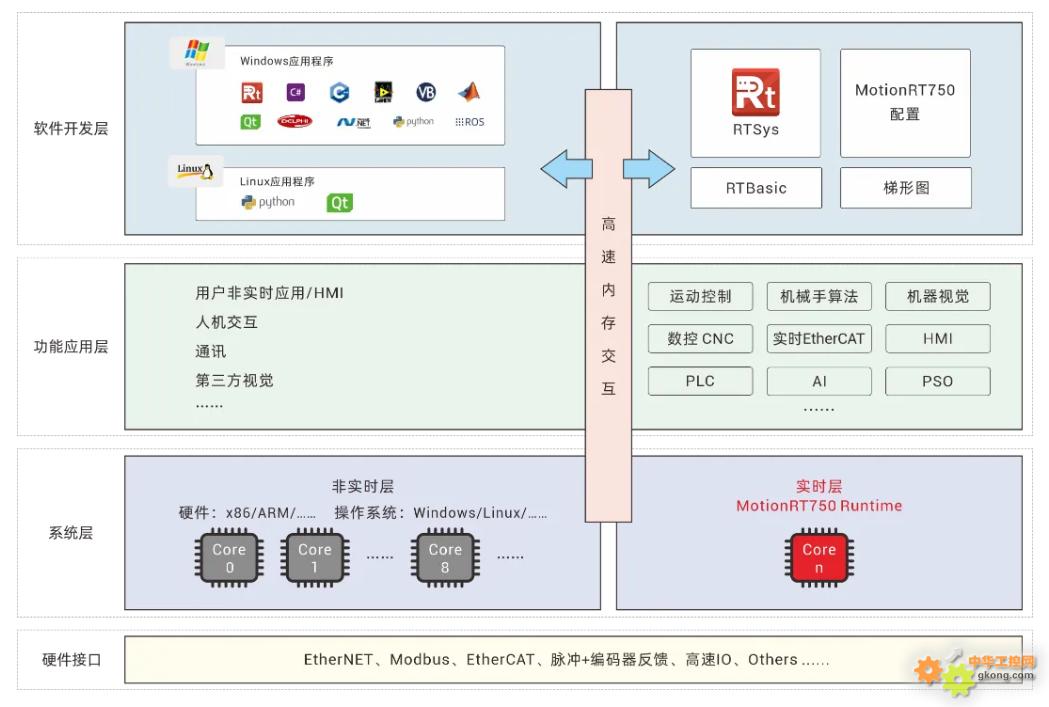
二、强实时运动控制内核 - MotionRT750
-
x86架构Windows/Linux系统下独占CPU内核的运动控制实时内核。
-
支持多达254轴的高精度运动控制,控制周期可低至125us,显著提升设备性能,助力产能提升至少20%。
-
单条指令的交互时间为 1-3us,相较于传统的PCI/PCIe、网口等通讯方式,速度提升了10-100倍以上。

-
搭载环形冗余架构,确保非故障从站持续保持正常 EtherCAT通信,可显著提升系统可靠性与运行稳定性。可有效杜绝EtherCAT通讯故障导致的产能损失。
-
当Windows因病毒入侵、硬件异常插拔或驱动冲突导致系统崩溃时,运动控制实时内核MotionRT750仍可持续运行,且急停功能仍然保持有效,提供充分响应时间进行事故处置,显著提升工业控制安全性与可靠性。
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等。
相关技术文摘
- ▪ 正运动SCARA机械手纸盒天地盖视觉定位贴合解决方案
- ▪ 强实时运动控制内核MotionRT750(十一):C#实现CAD导图和小线段速度前瞻优化
- ▪ 紧凑型网络运动控制卡ECI1808/ECI1A08
- ▪ 自主自研运动控制集成开发平台RTSys(二):EtherCAT总线快速配置
- ▪ 机器视觉运动控制一体机在导热硅脂涂胶的应用
- ▪ EtherCAT运动控制器配套用手持示教器ZHD301X快速入门
- ▪ 便携式手持示教器ZHD301X
- ▪ 强实时运动控制内核MotionRT750(十):运动控制中的微调轨迹动态补偿
- ▪ 机器视觉运动控制一体机在大功率共模电感多面AI外观缺陷检测应用
- ▪ MotionRT750 SoftMotion:XPCIE1032H超高速运动控制卡在AOI检测设备上的应用
编辑精选新闻


