|
1.正向科技利用自动控制技术、格雷母线精确定位技术、激光三维扫描技术、图像监控技术、安全防范技术等手段,自主设计开发了智能堆取料无人作业系统,融合了基于数学模拟建模技术与快速激光扫描建模技术,通过料堆三维模型坐标数据,精准下刀作业。
2.结合无线通讯与控制技术,利用高精度定位系统、料位雷达、防碰撞雷达、微波开关防碰撞系统,通过远程视频监控系统及空间防碰撞系统,对料堆三维图形和数据进行分析。
3.结合料场操作作业工艺控制策略,开发自动堆料取料执行控制程序,从而实现全天候的堆取料远程控制,与全自动无人作业,实现堆取料作业生产管理与操作作业的标准化、自动化。
4.系统实现全天候、主动安全防护的全自动化作业,有效解决散货料场堆取料作业存在的作业要求高、劳动强度大、操作员健康与安全隐患、流程效率较低、信息化手段较低等主要问题,提高料场生产组织与管理水平,实现全天候煤场斗轮机的远程全自动控制,有效解决手动操作效率低下及恶劣环境带来的诸多问题,大大提升设备运行的安全性和经济性。
成熟案例:
-
日照钢铁控股集团有限公司-日照京华W9循环经济部矿渣料场堆取料机无人化改造项目
-
宝武集团的胜钢铁公司-堆取料机大车走行和回转角度测量系统
-
太钢集团岚县矿业有限公司-精矿堆取料机全自动远程集中控制系统
-
华润温州电厂-堆取料机格雷母线定位系统
-
宝武集团武汉钢铁公司-集中煤场(B3)及配套料线环保改造智能化料场堆取料机走行位置检测系统
-
上海红箭自动化设备有限公司-连云港斗轮堆取料机格雷母线定位系统
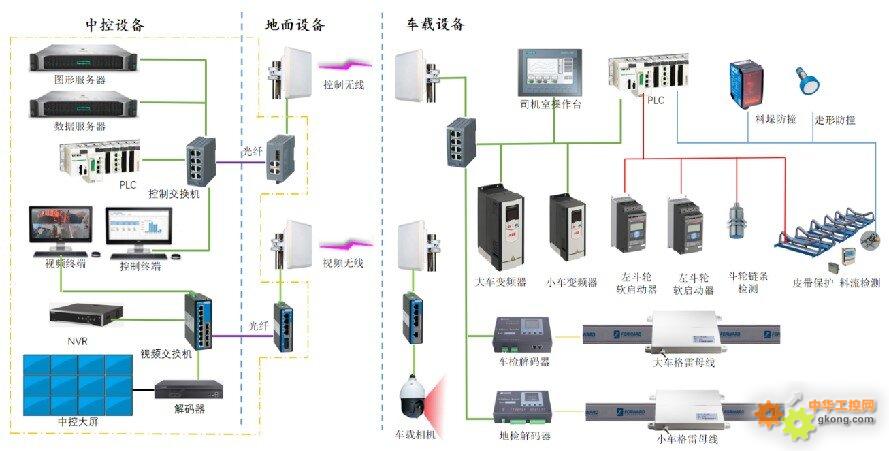
系统构成:
堆形扫描采集系统(激光雷达扫描成像)
虚拟三维图像重构系统(图形处理算法)
移动设备定位系统(格雷母线精确定位,角度传感器)
防碰撞系统(设备与堆料,设备与设备之间放碰撞)
作业规则库系统(自动转换成设备操作指令)
物料信息跟踪管理系统(物料品种、数量、堆放区域等)
智能化调度系统(作业流程推荐、作业指令生成)
|